Finite-shot operating windows for probabilistic error cancellation and Clifford data regression
Pith reviewed 2026-06-26 13:47 UTC · model grok-4.3
The pith
Finite-shot analysis finds a CDR-dominant window for error mitigation up to a bound scaling as 1 over calibration mismatch squared times noise strength.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Finite-shot mean-square-error boundaries establish a CDR-dominant operating window whose upper endpoint scales as B_PEC=CDR(p) proportional to 1 over delta one squared times p, together with a target-response projection theorem that response-blind affine CDR removes the first-order bias only when the target noise response is affine in the ideal target value.
What carries the argument
Mean-square-error competition between PEC quasi-probability variance overhead and CDR first-order calibration mismatch floor, together with the target-response projection theorem for affine CDR.
If this is right
- The same mean-square-error formulation extends directly to second-order calibration and to commuting Pauli Hamiltonians.
- Finite CDR training shots and residual PEC model bias can be incorporated without changing the operating-window structure.
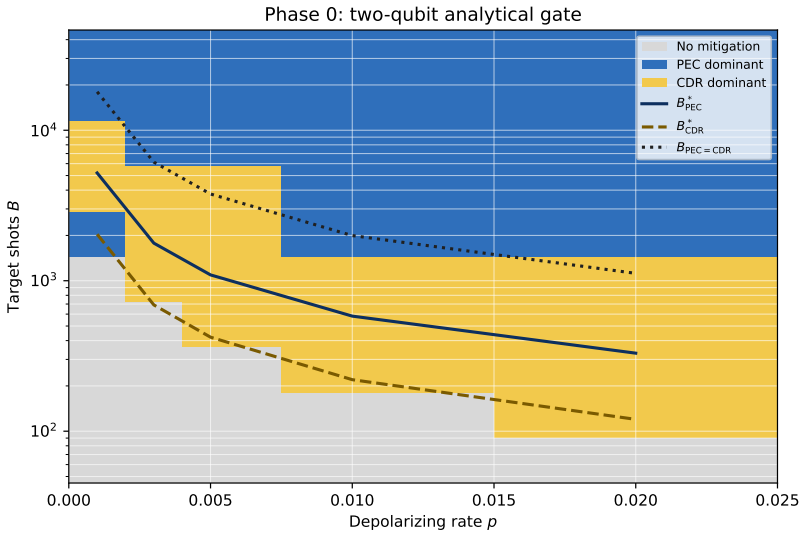
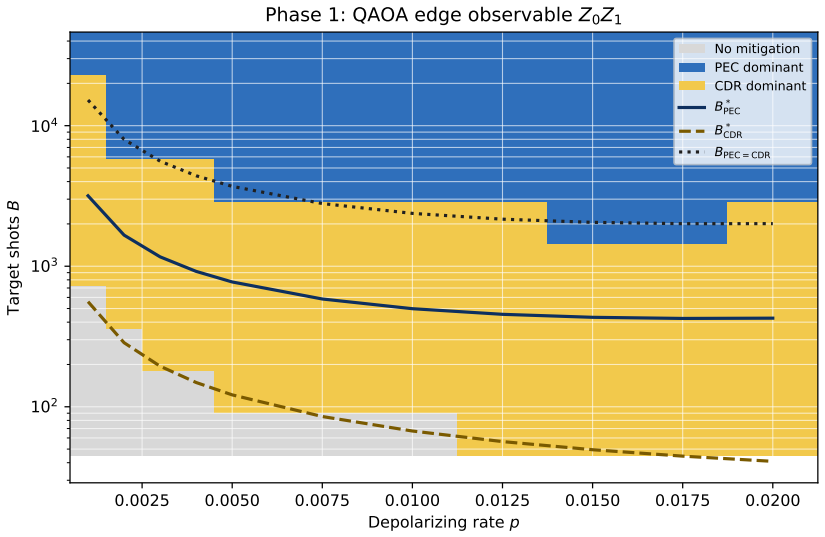
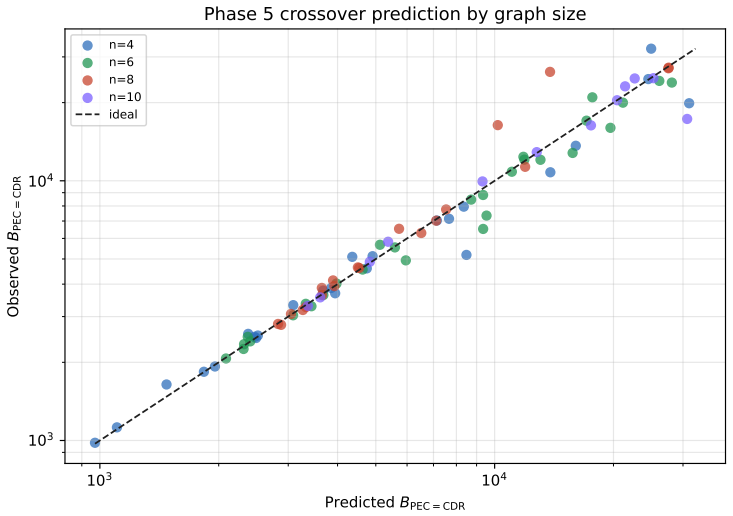
- Closed-form two-qubit calculations and QAOA simulations confirm the predicted no-mitigation, CDR-dominant, and PEC-dominant regimes.
Where Pith is reading between the lines
- Device-specific shot budgets could be chosen by first estimating the effective calibration mismatch to locate the operating window.
- The projection theorem implies that non-affine noise responses will retain an irreducible local calibration floor under standard affine CDR.
- Extensions to non-commuting observables or higher-order mismatches would test how the window boundaries change with system size.
Load-bearing premise
The derivations assume an exact noise inverse for PEC bias removal and a quantifiable first-order mismatch between training and target noise responses for CDR.
What would settle it
A controlled experiment that measures mean-square errors of PEC and CDR estimates while varying total shots and first-order calibration mismatch to test whether the CDR-dominant regime terminates at the predicted scaling proportional to 1 over delta one squared times p.
Figures
read the original abstract
Quantum error mitigation on noisy devices is limited not only by residual bias but also by the shot noise and calibration errors introduced by the mitigation procedure itself. We derive finite-shot mean-square-error boundaries for probabilistic error cancellation (PEC), Clifford data regression (CDR), and no mitigation for noisy Pauli-observable estimates. Exact PEC removes the target bias under an exact noise inverse at the price of a quasi-probability variance overhead, whereas population linear CDR can have smaller target-shot variance but retains a calibration floor when the training and target noise responses do not match. This competition yields a finite CDR-dominant operating window whose upper endpoint scales as $B_{\mathrm{PEC}=\mathrm{CDR}}(p)\propto 1/(\delta_1^2p)$, where $\delta_1$ is the first-order CDR calibration mismatch. We further prove a target-response projection theorem showing that response-blind affine CDR removes the first-order bias only when the target noise response is affine in the ideal target value; otherwise a nonzero projection error gives an irreducible local calibration floor. The same mean-square-error formulation extends to second-order calibration, commuting Pauli Hamiltonians, finite CDR training shots, and residual PEC model bias. A closed-form two-qubit calculation and QAOA simulations support the predicted no-mitigation, CDR-dominant, and PEC-dominant regimes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript derives finite-shot mean-square-error (MSE) boundaries for probabilistic error cancellation (PEC), Clifford data regression (CDR), and no mitigation when estimating noisy Pauli observables. It shows that this competition produces a finite CDR-dominant operating window whose upper endpoint scales as B_PEC=CDR(p) ∝ 1/(δ₁² p), where δ₁ is the first-order CDR calibration mismatch. A target-response projection theorem is proved: response-blind affine CDR removes first-order bias only when the target noise response is affine in the ideal target value; otherwise a nonzero projection error remains. The MSE framework is extended to second-order calibration, finite CDR training shots, residual PEC model bias, and commuting Pauli Hamiltonians. Support is provided by a closed-form two-qubit calculation and QAOA simulations that reproduce the predicted no-mitigation, CDR-dominant, and PEC-dominant regimes.
Significance. If the derivations hold, the paper supplies first-principles, quantitatively usable guidance on the finite-shot regimes in which CDR is preferable to PEC or no mitigation, together with explicit scaling relations and a precise condition for bias removal. This is of direct practical value for near-term quantum error mitigation, where shot budgets are constrained. The work is strengthened by the closed-form two-qubit case and the reproduction of the predicted regimes in QAOA simulations.
minor comments (2)
- [Abstract] Abstract: the symbol p appearing in the scaling B_PEC=CDR(p) is not defined; a parenthetical clarification (e.g., “p = number of shots”) would improve immediate readability.
- [Abstract] The projection theorem is stated clearly in the abstract but its proof would benefit from an explicit statement of the affine assumption on the training set (currently implicit).
Simulated Author's Rebuttal
We thank the referee for the positive assessment, accurate summary of our contributions, and recommendation of minor revision. No major comments were raised in the report.
Circularity Check
No significant circularity identified
full rationale
The paper derives finite-shot MSE boundaries for PEC, CDR and no-mitigation estimates directly from variance expressions, obtains the CDR-dominant window upper endpoint scaling B_PEC=CDR(p)∝1/(δ₁²p) by comparing the resulting MSE terms under the stated first-order mismatch assumption, and proves the target-response projection theorem by explicit linear-algebra projection under the affine-response condition. These steps are presented as first-principles calculations with no reduction to fitted parameters, self-definitional loops, or load-bearing self-citations. The same MSE formulation is then extended to second-order calibration, finite training shots and residual bias without circular re-use of the target result. The manuscript supplies independent closed-form two-qubit and QAOA verification, confirming the derivations remain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- δ₁
axioms (2)
- domain assumption Exact noise inverse for PEC
- domain assumption Affine target noise response for CDR bias removal
Reference graph
Works this paper leans on
-
[2]
In the two-dimensional target-response coordinates(µ0, βT ), the targets for which linear CDR is first-order calibrated form the affine hyperplane Ccal ={(µ 0, βT ) :β T =a 1µ0 +b 1}.(B13) For every target outside this set, bmis(p) =δ 1p+O(p 2), δ 1 ̸= 0.(B14) Thus anO(p 2)CDR residual is a structural calibration condition on the relation be- tween the tr...
-
[3]
generic mismatch
For the population OLS predictorfp(x) =a ∗(p)x+b ∗(p)learned from this fixed training distribution, the target residual satisfies fp(µp)−µ 0 =O(p 2)(B15) if and only if the target is first-order calibrated,δ1 =β T −a 1µ0 −b 1 = 0. The second statement applies to OLS-CDR trained from the fixed distributionT; target- specific affine maps belong to a differe...
-
[4]
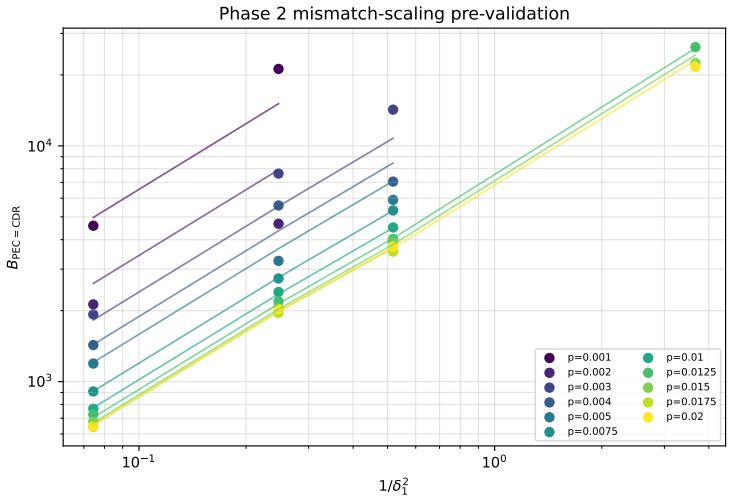
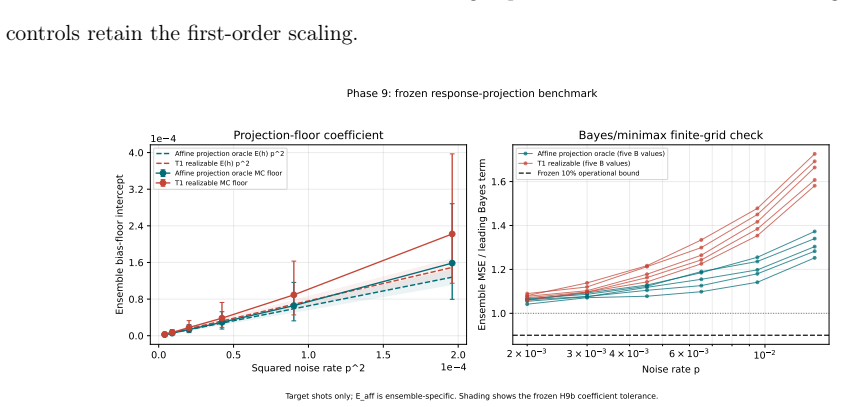
Each calibration row fits logB PEC=CDR againstlog(1/δ 2 1)at fixedp, so the leading-order law (53) predicts slope one
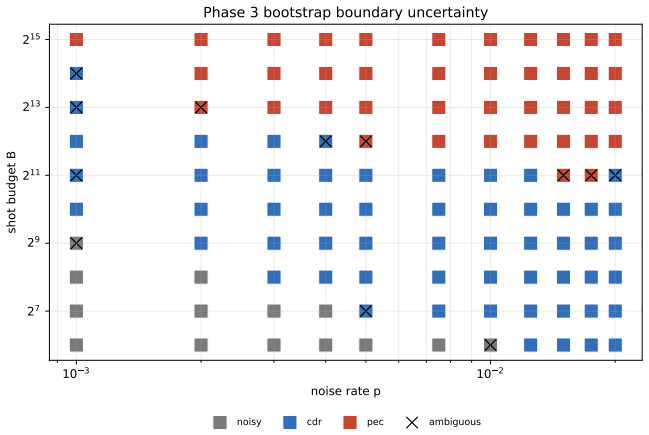
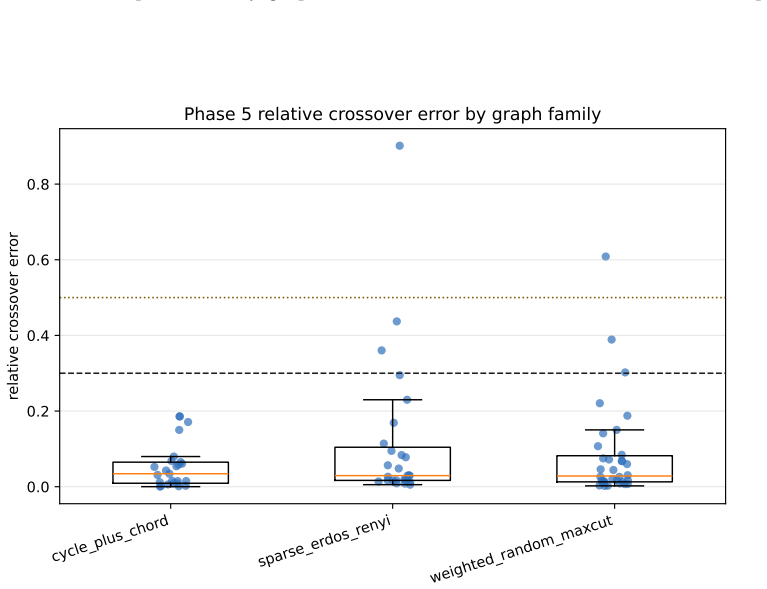
Mismatch scaling and boundary uncertainty The mismatch-scaling experiment supports the leading-order prediction that CDR’s useful budget interval is controlled by calibration mismatch. Each calibration row fits logB PEC=CDR againstlog(1/δ 2 1)at fixedp, so the leading-order law (53) predicts slope one. The median observed slope is0.8959with IQR[0.8864,0.9...
1935
-
[5]
The Hamiltonian CDR map uses the scalar-trained Hamil- tonian correction of Section VI
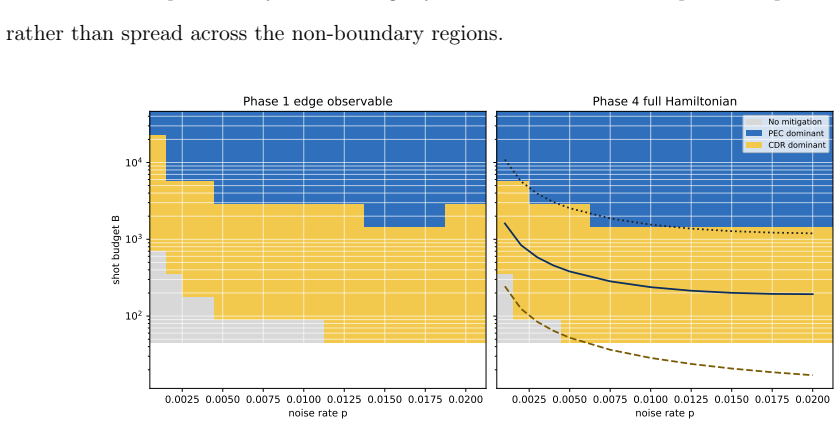
Hamiltonian and instance robustness The baseline scalar edge observable is complemented by a Hamiltonian-level test, which replacesZ 0Z1 with the full commuting weighted MaxCut Hamiltonian and includes the co- variance terms from Section VI. The Hamiltonian CDR map uses the scalar-trained Hamil- tonian correction of Section VI. All non-boundary classifica...
-
[6]
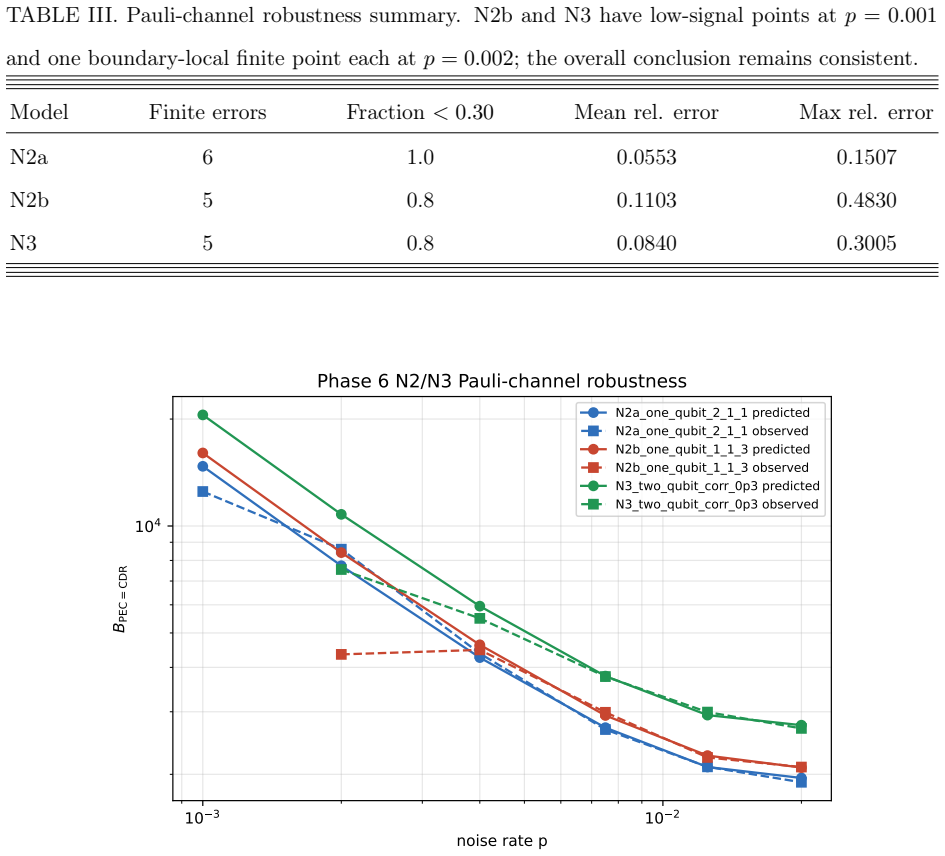
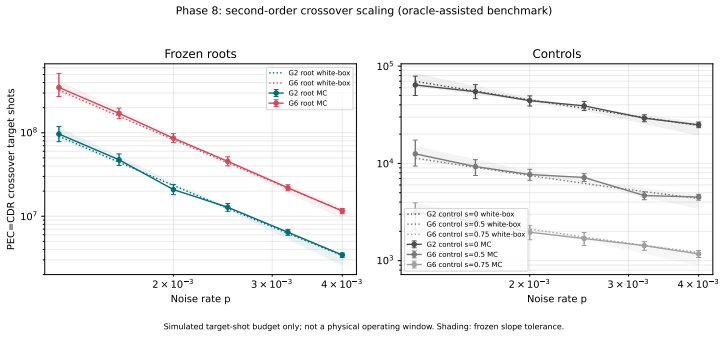
Pauli-channel robustness The Pauli-channel robustness test verifies that the finite-shot prediction extends beyond the symmetric depolarizing closed form forΓQ. The tested variants use positive channel- specific PEC inverses: N2a haspx :p y :p z = 2 : 1 : 1, N2b uses1 : 1 : 3, and N3 adds sparse correlatedXXandZZtwo-qubit Pauli terms. 34 103 104 Predicted...
-
[7]
K. Temme, S. Bravyi, and J. M. Gambetta, “Error mitigation for short-depth quantum cir- cuits,”Phys. Rev. Lett.119, 180509 (2017). doi:10.1103/PhysRevLett.119.180509
work page internal anchor Pith review doi:10.1103/physrevlett.119.180509 2017
-
[8]
S. Endo, S. C. Benjamin, and Y. Li, “Practical quantum error mitigation for near-future applications,”Phys. Rev. X8, 031027 (2018). doi:10.1103/PhysRevX.8.031027
-
[9]
Optimal resource cost for error mitigation,
R. Takagi, “Optimal resource cost for error mitigation,”Phys. Rev. Research3, 033178 (2021). doi:10.1103/PhysRevResearch.3.033178
-
[10]
Quasiprobability decompositions with reduced sam- pling overhead,
C. Piveteau, D. Sutter, and S. Woerner, “Quasiprobability decompositions with reduced sam- pling overhead,”npj Quantum Inf.8, 12 (2022). doi:10.1038/s41534-022-00517-3
-
[11]
E. van den Berg, Z. K. Minev, A. Kandala, and K. Temme, “Probabilistic error cancellation with sparse Pauli–Lindblad models on noisy quantum processors,”Nat. Phys.19, 1116–1121 (2023). doi:10.1038/s41567-023-02042-2
-
[12]
P. Czarnik, A. Arrasmith, P. J. Coles, and L. Cincio, “Error mitigation with Clifford quantum- circuit data,”Quantum5, 592 (2021). doi:10.22331/q-2021-11-26-592
-
[13]
Learning-based quantum error mitigation,
A. Strikis, D. Qin, Y. Chen, S. C. Benjamin, and Y. Li, “Learning-based quantum error mitigation,”PRX Quantum2, 040330 (2021). doi:10.1103/PRXQuantum.2.040330
-
[14]
Unified ap- proach to data-driven quantum error mitigation,
A. Lowe, M. H. Gordon, P. Czarnik, A. Arrasmith, P. J. Coles, and L. Cincio, “Unified ap- proach to data-driven quantum error mitigation,”Phys. Rev. Research3, 033098 (2021). doi: 10.1103/PhysRevResearch.3.033098
-
[15]
doi:10.1103/RevModPhys.95.045005 , url =
Z. Cai, R. Babbush, S. C. Benjamin, S. Endo, W. J. Huggins, Y. Li, J. R. McClean, and T. E. O’Brien, “Quantum error mitigation,”Rev. Mod. Phys.95, 045005 (2023). doi: 10.1103/RevModPhys.95.045005
-
[16]
D. Bultrini, M. H. Gordon, P. Czarnik, A. Arrasmith, M. Cerezo, P. J. Coles, and L. Cincio, “Unifying and benchmarking state-of-the-art quantum error mitigation techniques,”Quantum 7, 1034 (2023). doi:10.22331/q-2023-06-06-1034
-
[17]
Testing platform-independent quantum error mitigation on noisy quantum computers,
V. Russo, A. Mari, N. Shammah, R. LaRose, and W. J. Zeng, “Testing platform-independent quantum error mitigation on noisy quantum computers,”IEEE Trans. Quantum Eng.4, 1–18 (2023). doi:10.1109/TQE.2023.3305232
-
[18]
Can error mitigation improve trainability of noisy variational quantum algo- rithms?,
S. Wang et al., “Can error mitigation improve trainability of noisy variational quantum algo- rithms?,”Quantum8, 1287 (2024). doi:10.22331/q-2024-03-14-1287. 43
-
[19]
R. Takagi, S. Endo, S. Minagawa, and M. Gu, “Fundamental limits of quantum error mitiga- tion,”npj Quantum Inf.8, 114 (2022). doi:10.1038/s41534-022-00618-z
-
[20]
R. Takagi, H. Tajima, and M. Gu, “Universal sampling lower bounds for quantum error miti- gation,”Phys. Rev. Lett.131, 210602 (2023). doi:10.1103/PhysRevLett.131.210602
-
[21]
Universal cost bound of quantum error mit- igation based on quantum estimation theory,
K. Tsubouchi, T. Sagawa, and N. Yoshioka, “Universal cost bound of quantum error mit- igation based on quantum estimation theory,”Phys. Rev. Lett.131, 210601 (2023). doi: 10.1103/PhysRevLett.131.210601
-
[22]
Exponentially tighter bounds on limitations of quantum error mitigation,
Y. Quek, D. Stilck Franca, S. Khatri, J. J. Meyer, and J. Eisert, “Exponentially tighter bounds on limitations of quantum error mitigation,”Nat. Phys.20, 1648–1658 (2024). doi: 10.1038/s41567-024-02536-7
-
[23]
Y. Li and S. C. Benjamin, “Efficient variational quantum simulator incorporating active error minimization,”Phys. Rev. X7, 021050 (2017). doi:10.1103/PhysRevX.7.021050
-
[24]
Quantum computation with universal error mitigation on a superconducting quantum processor,
C. Song et al., “Quantum computation with universal error mitigation on a superconducting quantum processor,”Sci. Adv.5, eaaw5686 (2019). doi:10.1126/sciadv.aaw5686
-
[25]
Error mitigation extends the computational reach of a noisy quantum processor,
A. Kandala et al., “Error mitigation extends the computational reach of a noisy quantum processor,”Nature567, 491–495 (2019). doi:10.1038/s41586-019-1040-7
-
[26]
T. Giurgica-Tiron, Y. Hindy, R. LaRose, A. Mari, and W. J. Zeng, “Digital zero noise extrap- olation for quantum error mitigation,” in2020 IEEE International Conference on Quantum Computing and Engineering (QCE), 306–316 (2020). doi:10.1109/QCE49297.2020.00045
-
[27]
Extending quantum probabilistic error cancellation by noise scaling,
A. Mari, N. Shammah, and W. J. Zeng, “Extending quantum probabilistic error cancellation by noise scaling,”Phys. Rev. A104, 052607 (2021). doi:10.1103/PhysRevA.104.052607
-
[28]
Reduced sampling overhead for probabilistic error cancellation by Pauli error propagation,
T. Scheiber, P. Haubenwallner, and M. Heller, “Reduced sampling overhead for probabilistic error cancellation by Pauli error propagation,”Quantum9, 1840 (2025). doi:10.22331/q-2025- 08-29-1840
-
[29]
Faster probabilistic error cancellation,
Y.-H. Chen, “Faster probabilistic error cancellation,” arXiv:2506.04468 (2025)
arXiv 2025
-
[30]
Theory of quantum error mitigation for non-Clifford gates,
D. Layden, B. Mitchell, and K. Siva, “Theory of quantum error mitigation for non-Clifford gates,”Quantum10, 2003 (2026). doi:10.22331/q-2026-02-10-2003
-
[31]
Improving the efficiency of learning- based error mitigation,
P. Czarnik, M. McKerns, A. T. Sornborger, and L. Cincio, “Improving the efficiency of learning- based error mitigation,”Quantum9, 1727 (2025). doi:10.22331/q-2025-05-05-1727
-
[32]
Extension of Clifford data regression methods for quantum error mitigation,
J. Pérez-Guijarro, A. Pagès-Zamora, and J. R. Fonollosa, “Extension of Clifford data regression methods for quantum error mitigation,”IEEE Trans. Quantum Eng.7, 1–22 (2026). doi: 44 10.1109/TQE.2026.3677541
-
[33]
Machine learn- ing for practical quantum error mitigation,
H. Liao, D. S. Wang, I. Sitdikov, C. Salcedo, A. Seif, and Z. K. Minev, “Machine learn- ing for practical quantum error mitigation,”Nat. Mach. Intell.6, 1478–1486 (2024). doi: 10.1038/s42256-024-00927-2
-
[34]
Noise-agnostic quantum error mitigation with dataaugmentedneuralmodels,
M. Liao, Y. Zhu, G. Chiribella, and Y. Yang, “Noise-agnostic quantum error mitigation with dataaugmentedneuralmodels,”npj Quantum Inf.11, 8(2025).doi:10.1038/s41534-025-00960- y
-
[35]
Error statistics and scalability of quantum error mitigation formulas,
D. Qin, Y. Chen, and Y. Li, “Error statistics and scalability of quantum error mitigation formulas,”npj Quantum Inf.9, 35 (2023). doi:10.1038/s41534-023-00707-7
-
[36]
Mitiq: A software package for error mitigation on noisy quantum computers,
R. LaRose et al., “Mitiq: A software package for error mitigation on noisy quantum computers,” Quantum6, 774 (2022). doi:10.22331/q-2022-08-11-774
-
[37]
Volumetric benchmarking of error mitigation with Qermit,
C. Cirstoiu, S. Dilkes, D. Mills, S. Sivarajah, and R. Duncan, “Volumetric benchmarking of error mitigation with Qermit,”Quantum7, 1059 (2023). doi:10.22331/q-2023-07-13-1059
-
[38]
Scalable error mitigation for noisy quantum circuits produces competitive expectation values,
Y. Kim et al., “Scalable error mitigation for noisy quantum circuits produces competitive expectation values,”Nat. Phys.19, 752–759 (2023). doi:10.1038/s41567-022-01914-3
-
[39]
L. C. G. Govia et al., “Bounding the systematic error in quantum error mitigation due to model violation,”PRX Quantum6, 010354 (2025). doi:10.1103/PRXQuantum.6.010354
-
[40]
Error mitigation thresholds in noisy random quantum circuits,
P. Niroula, S. Gopalakrishnan, and M. J. Gullans, “Error mitigation thresholds in noisy random quantum circuits,”Phys. Rev. B112, 024206 (2025). doi:10.1103/qsmz-9kkh
-
[41]
Robust design under uncertainty in quantum error mitigation,
M. Prodius, P. Czarnik, M. McKerns, A. T. Sornborger, and L. Cincio, “Robust design under uncertainty in quantum error mitigation,”IEEE Trans. Quantum Eng.7, 1–13 (2026). doi: 10.1109/TQE.2026.3680641
-
[42]
Error-mitigation aware benchmarking strategy for quantum optimization problems,
M. Demarty, B. Yang, K. Hammam, and P. Besserve, “Error-mitigation aware benchmarking strategy for quantum optimization problems,” arXiv:2601.18680 (2026)
arXiv 2026
-
[43]
Estimating shots and variance on noisy quantum circuits,
M. Seksaria and A. Prabhakar, “Estimating shots and variance on noisy quantum circuits,” arXiv:2501.03194v2 (2025; revised 2026)
arXiv 2025
-
[44]
J. O. Berger,Statistical Decision Theory and Bayesian Analysis, 2nd ed., Springer (1985). 45
1985
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.