Dual-Informed Vertical Expansion for Multi-Objective Node Selection in Anytime Conflict-Based Search
Pith reviewed 2026-07-02 18:44 UTC · model grok-4.3
The pith
DIVE node selection in CBS for MAPF restarts from the best-bound frontier and follows depth-oriented dives to cut memory use while delivering early feasible solutions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
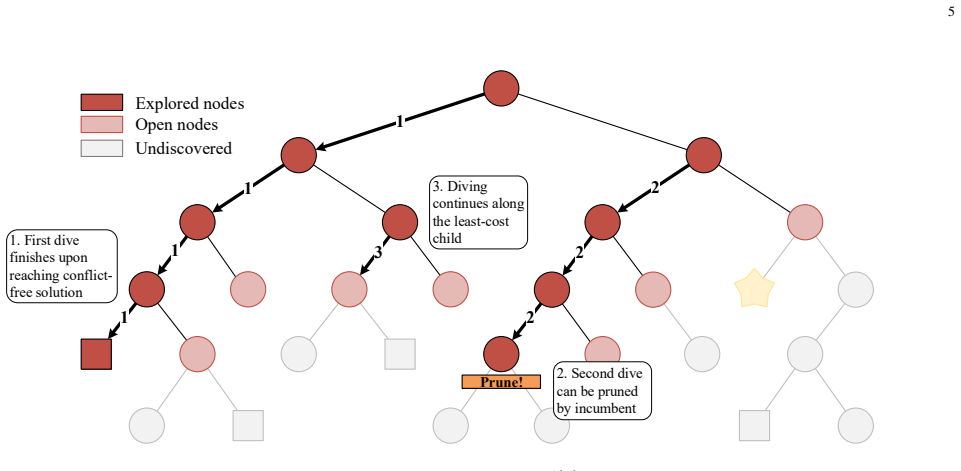
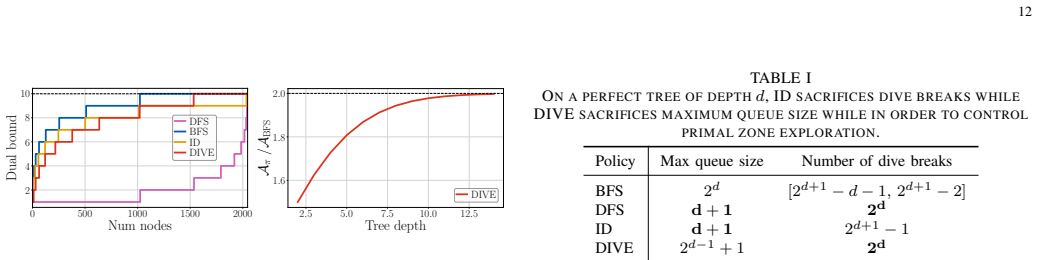
We formalize CBS node selection through a branch-and-bound view, prove that the traversal policy can be changed without affecting exactness, and introduce DIVE, a policy that is best-bound between dives and depth-oriented within a dive. DIVE starts each dive from the current best-bound frontier, follows promising children to exploit parent-child locality, and uses incumbent pruning to limit unproductive excursions. The analysis predicts three complementary extremes: best-first search is node efficient, iterative deepening is memory efficient, and DIVE is dive efficient while retaining regular best-bound reanchoring.
What carries the argument
Dual-Informed Vertical Expansion (DIVE), the node-selection policy that selects the best-bound node to start each dive and then expands depth-first within the dive while using incumbent pruning.
If this is right
- DIVE reduces the number of dive breaks relative to best-first search.
- DIVE supplies early feasible incumbents together with certified optimality gaps.
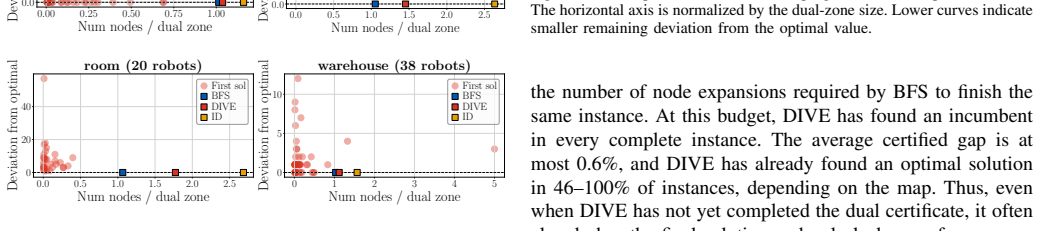
- DIVE uses substantially less queue memory than best-first search.
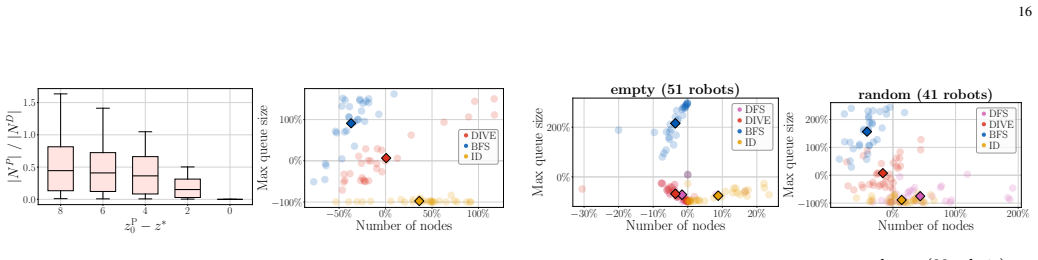
- DIVE benefits from warm starts and simple responsive variants in dense or memory-limited regimes.
Where Pith is reading between the lines
- The same best-bound-plus-depth-dive pattern could be tested in other branch-and-bound planners that currently rely on pure best-first selection.
- In settings where memory rather than node count is the bottleneck, responsive DIVE variants might solve instances that best-first CBS cannot finish.
- The three-way trade-off map (nodes, memory, dive breaks) suggests that hybrid policies tuned to hardware constraints could be derived directly from the same formalization.
Load-bearing premise
Changing the high-level traversal order inside the branch-and-bound formalization of CBS leaves exactness and the optimality certificate intact.
What would settle it
A run on the standard MAPF benchmark suite in which DIVE produces no earlier feasible incumbent than best-first search while expanding at least as many nodes.
Figures

read the original abstract
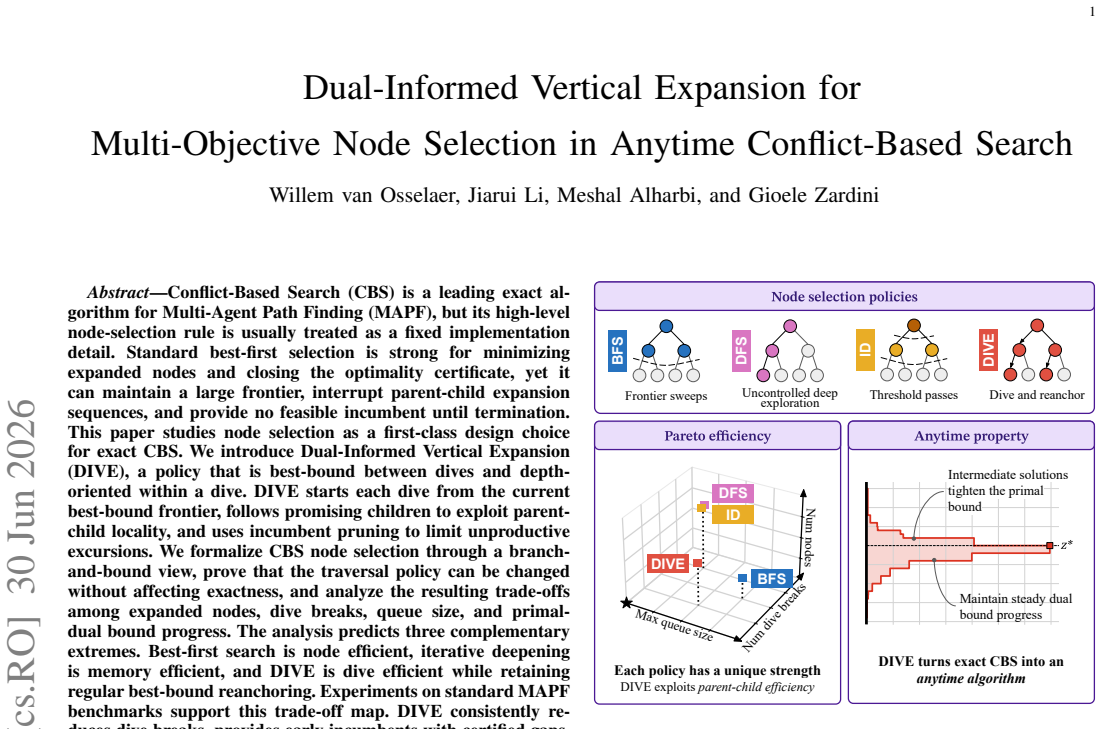
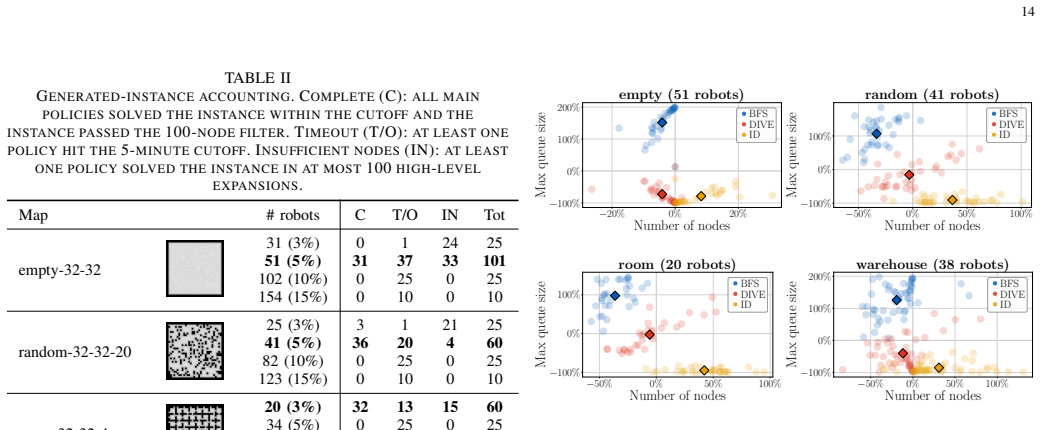
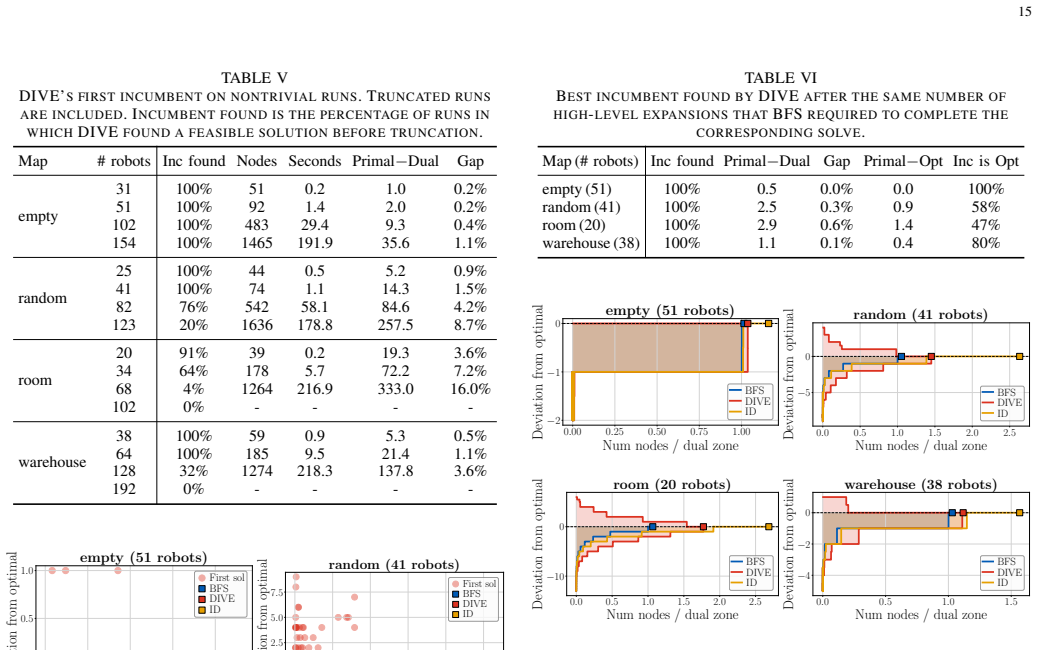
Conflict-Based Search (CBS) is a leading exact algorithm for Multi-Agent Path Finding (MAPF), but its high-level node-selection rule is usually treated as a fixed implementation detail. Standard best-first selection is strong for minimizing expanded nodes and closing the optimality certificate, yet it can maintain a large frontier, interrupt parent-child expansion sequences, and provide no feasible incumbent until termination. This paper studies node selection as a first-class design choice for exact CBS. We introduce Dual-Informed Vertical Expansion (DIVE), a policy that is best-bound between dives and depth-oriented within a dive. DIVE starts each dive from the current best-bound frontier, follows promising children to exploit parent-child locality, and uses incumbent pruning to limit unproductive excursions. We formalize CBS node selection through a branch-and-bound view, prove that the traversal policy can be changed without affecting exactness, and analyze the resulting trade-offs among expanded nodes, dive breaks, queue size, and primal-dual bound progress. The analysis predicts three complementary extremes. Best-first search is node efficient, iterative deepening is memory efficient, and DIVE is dive efficient while retaining regular best-bound reanchoring. Experiments on standard MAPF benchmarks support this trade-off map. DIVE consistently reduces dive breaks, provides early incumbents with certified gaps, uses substantially less queue memory than best-first search, and benefits from warm starts and simple responsive variants in dense or memory-limited regimes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to formalize CBS node selection through a branch-and-bound view, prove that the high-level traversal policy can be changed without affecting exactness or the optimality certificate, and introduce DIVE, a policy that is best-bound between dives and depth-oriented within a dive. It analyzes trade-offs among expanded nodes, dive breaks, queue size, and primal-dual bound progress, predicts three complementary extremes (best-first, iterative deepening, DIVE), and reports experimental support on standard MAPF benchmarks showing reduced dive breaks, early incumbents with certified gaps, and lower queue memory than best-first search.
Significance. If the formalization, proof, and experimental claims hold, the result would be significant for exact MAPF solvers by elevating node selection to a tunable design choice that preserves optimality while improving practical metrics such as memory footprint and anytime behavior; the explicit trade-off map and identification of DIVE as dive-efficient with best-bound reanchoring would provide a concrete framework for future policy variants.
major comments (1)
- [Abstract] Abstract: the central claim that 'the traversal policy can be changed without affecting exactness' is load-bearing for all subsequent contributions, yet no formalization, proof sketch, equations, or section reference is visible in the supplied manuscript text, leaving the weakest assumption (that branch-and-bound permits arbitrary high-level order changes while preserving the optimality certificate) unverified.
Simulated Author's Rebuttal
We thank the referee for the review and the identification of this point. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'the traversal policy can be changed without affecting exactness' is load-bearing for all subsequent contributions, yet no formalization, proof sketch, equations, or section reference is visible in the supplied manuscript text, leaving the weakest assumption (that branch-and-bound permits arbitrary high-level order changes while preserving the optimality certificate) unverified.
Authors: The formalization of CBS node selection via a branch-and-bound lens, together with the proof that any high-level traversal policy may be substituted without affecting exactness or the optimality certificate (provided best-bound selection is respected when closing the dual gap), is presented in full in Section 3 of the manuscript, including the relevant equations and proof sketch. The abstract states the result at a summary level, as is conventional, but we agree that an explicit section pointer would strengthen the abstract. We will therefore revise the abstract to read: 'We formalize CBS node selection through a branch-and-bound view (Section 3), prove that the traversal policy can be changed without affecting exactness...' revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper formalizes CBS node selection via branch-and-bound and claims a proof that arbitrary traversal policy changes preserve exactness and optimality certificate. No equations, fitted parameters, self-citations, or ansatzes are exhibited in the abstract or summary that reduce any prediction or uniqueness claim to a definition or input by construction. DIVE is introduced as an explicit design choice with analyzed trade-offs, and experiments are cited as external support. This is a self-contained argument with independent content; no load-bearing step collapses to circularity.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption CBS node selection can be viewed as branch-and-bound traversal whose order can be altered without losing exactness.
Reference graph
Works this paper leans on
-
[1]
Multi-agent pathfinding: Definitions, variants, and benchmarks,
R. Stern, N. R. Sturtevant, A. Felner, S. Koenig, H. Ma, T. T. Walker, J. Li, D. Atzmon, L. Cohen, T. K. S. Kumar, E. Boyarski, and R. Bar- tak, “Multi-agent pathfinding: Definitions, variants, and benchmarks,” Symposium on Combinatorial Search (SoCS), pp. 151–158, 2019
2019
-
[2]
Planning, scheduling and monitoring for airport surface operations,
R. Morris, C. S. P ˘as˘areanu, K. S. Luckow, W. Malik, H. Ma, T. K. S. Kumar, and S. Koenig, “Planning, scheduling and monitoring for airport surface operations,” inPlanning for Hybrid Systems, Papers from the 2016 AAAI Workshop, ser. AAAI Technical Report, vol. WS-16-12. AAAI Press, 2016
2016
-
[3]
Structure and intractability of optimal multi- robot path planning on graphs,
J. Yu and S. M. LaValle, “Structure and intractability of optimal multi- robot path planning on graphs,” inNat. Conf. on Artificial Intelligence (AAAI), vol. 27, no. 1, 2013, pp. 1443–1449
2013
-
[4]
Conflict-based search for optimal multi-agent pathfinding,
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfinding,”Artificial Intelligence, vol. 219, pp. 40–66, 2015
2015
-
[5]
Iterative-deepening conflict-based search,
E. Boyarski, A. Felner, D. Harabor, P. J. Stuckey, L. Cohen, J. Li, and S. Koenig, “Iterative-deepening conflict-based search,” inIntl. Joint Conf. on AI (IJCAI), 2020, pp. 4084–4090
2020
-
[6]
Adding heuristics to conflict-based search for multi- agent path finding,
A. Felner, J. Li, E. Boyarski, H. Ma, L. Cohen, T. K. S. Kumar, and S. Koenig, “Adding heuristics to conflict-based search for multi- agent path finding,” inProceedings of the International Conference on Automated Planning and Scheduling, vol. 28, no. 1, 2018, pp. 83–87
2018
-
[7]
Improved heuristics for multi-agent path finding with conflict-based search,
J. Li, A. Felner, E. Boyarski, H. Ma, and S. Koenig, “Improved heuristics for multi-agent path finding with conflict-based search,” inIntl. Joint Conf. on AI (IJCAI), 2019, pp. 442–449
2019
-
[8]
Optimal sequential task assignment and path finding for multi-agent robotic assembly planning,
K. Brown, O. Peltzer, M. A. Sehr, M. Schwager, and M. J. Kochenderfer, “Optimal sequential task assignment and path finding for multi-agent robotic assembly planning,” inIEEE Intl. Conf. on Robotics and Automation (ICRA). IEEE, 2020, pp. 441–447
2020
-
[9]
Grand: Guidance, rebalancing, and assignment for networked dispatch in multi-agent path finding,
J. Gaber, M. Alharbi, D. Gammelli, and G. Zardini, “Grand: Guidance, rebalancing, and assignment for networked dispatch in multi-agent path finding,”IEEE Robotics and Automation Letters, 2026
2026
-
[10]
Fico: Finite- horizon closed-loop factorization for unified multi-agent path finding,
J. Li, A. Zanardi, F. Pecora, R. Zhang, and G. Zardini, “Fico: Finite- horizon closed-loop factorization for unified multi-agent path finding,” arXiv preprint arXiv:2511.13961, 2025
-
[11]
Icbs: The improved conflict-based search algorithm for multi-agent pathfinding,
E. Boyarski, A. Felner, R. Stern, G. Sharon, O. Betzalel, D. Tolpin, and E. Shimony, “Icbs: The improved conflict-based search algorithm for multi-agent pathfinding,” inProceedings of the International Symposium on Combinatorial Search, vol. 6, no. 1, 2015, pp. 223–225
2015
-
[12]
Suboptimal variants of the conflict-based search algorithm for the multi-agent pathfinding prob- lem,
M. Barer, G. Sharon, R. Stern, and A. Felner, “Suboptimal variants of the conflict-based search algorithm for the multi-agent pathfinding prob- lem,” inProceedings of the International Symposium on Combinatorial Search, vol. 5, no. 1, 2014, pp. 19–27
2014
-
[13]
Eecbs: A bounded-suboptimal search for multi-agent path finding,
J. Li, W. Ruml, and S. Koenig, “Eecbs: A bounded-suboptimal search for multi-agent path finding,” inNat. Conf. on Artificial Intelligence (AAAI), vol. 35, no. 14, 2021, pp. 12 353–12 362
2021
-
[14]
Adaptive-Horizon Conflict-Based Search for Closed-Loop Multi-Agent Path Finding
J. Li, F. Pecora, R. Zhang, and G. Zardini, “Adaptive-horizon conflict- based search for closed-loop multi-agent path finding,”arXiv preprint arXiv:2602.12024, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[15]
Certificate-driven closed-loop multi-agent path finding with inheritable factorization,
J. Li, R. Zhang, and G. Zardini, “Certificate-driven closed-loop multi-agent path finding with inheritable factorization,”arXiv preprint arXiv:2604.00428, 2026
-
[16]
Multi-agent path finding in configurable environments,
M. Bellusci, N. Basilico, and F. Amigoni, “Multi-agent path finding in configurable environments,” inProceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, 2020, pp. 159–167
2020
-
[17]
Multi-Agent Cooperative Transportation: Optimal and Efficient Task Allocation and Path Finding
N. Zhou, N. W. F. Bode, and E. R. Hunt, “Multi-agent cooperative transportation: Optimal and efficient task allocation and path finding,” arXiv preprint arXiv:2605.16097, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[18]
Learning node-selection strate- gies in bounded-suboptimal conflict-based search for multi-agent path finding,
T. Huang, B. Dilkina, and S. Koenig, “Learning node-selection strate- gies in bounded-suboptimal conflict-based search for multi-agent path finding,” inProceedings of the 20th International Conference on Au- tonomous Agents and MultiAgent Systems, 2021, pp. 611–619
2021
-
[19]
Priority inheri- tance with backtracking for iterative multi-agent path finding,
K. Okumura, M. Machida, X. D ´efago, and Y . Tamura, “Priority inheri- tance with backtracking for iterative multi-agent path finding,”Artificial Intelligence, vol. 310, p. 103752, 2022
2022
-
[20]
Branch-and-bound methods: A survey,
E. L. Lawler and D. E. Wood, “Branch-and-bound methods: A survey,” Operations Research, vol. 14, no. 4, pp. 699–719, 1966
1966
-
[21]
Constraint integer programming,
T. Achterberg, “Constraint integer programming,” Ph.D. dissertation, Technische Universit¨at Berlin, 2007
2007
-
[22]
Parameter guidelines,
Gurobi Optimization, LLC, “Parameter guidelines,” https://docs.gurobi. com/projects/optimizer/en/current/concepts/parameters/guidelines.html, 2026, accessed: 2026-06-22
2026
-
[23]
Mip emphasis switch,
IBM, “Mip emphasis switch,” https://www.ibm.com/docs/en/icos/22.1. 1?topic=parameters-mip-emphasis-switch, 2026, accessed: 2026-06-22
2026
-
[24]
Anytime hybrid best-first search with tree decomposition for weighted csp,
D. Allouche, S. de Givry, G. Katsirelos, T. Schiex, and M. Zytnicki, “Anytime hybrid best-first search with tree decomposition for weighted csp,” inPrinciples and Practice of Constraint Programming, ser. Lecture Notes in Computer Science, vol. 9255. Springer, 2015, pp. 12–29
2015
-
[25]
Learning to search in branch and bound algorithms,
H. He, H. Daum ´e III, and J. Eisner, “Learning to search in branch and bound algorithms,” inAdvances in Neural Information Processing Systems (NIPS), vol. 27, 2014, pp. 3293–3301
2014
-
[26]
Reinforcement learning for node selection in branch-and-bound,
A. Mattick and C. Mutschler, “Reinforcement learning for node selection in branch-and-bound,”Transactions on Machine Learning Research, 2024
2024
-
[27]
Learning to compare nodes in branch and bound with graph neural networks,
A. G. Labassi, D. Ch ´etelat, and A. Lodi, “Learning to compare nodes in branch and bound with graph neural networks,” inAdvances in Neural Information Processing Systems (NIPS), vol. 35, 2022, pp. 32 000– 32 010
2022
-
[28]
Learning to resolve conflicts for multi-agent path finding with conflict-based search,
T. Huang, S. Koenig, and B. Dilkina, “Learning to resolve conflicts for multi-agent path finding with conflict-based search,” inNat. Conf. on Artificial Intelligence (AAAI), vol. 35, no. 13, 2021, pp. 11 246–11 253. APPENDIX Proof of Proposition 2.Letz P t be the incumbent value after iterationt, and let Ft :={q∈Q:g(q)< z P t } be the feasible solutions t...
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.