A Multi-Agent System for IPMSM Design Optimization via an FEA-AI Hybrid Approach
Pith reviewed 2026-06-27 16:50 UTC · model grok-4.3
The pith
An uncertainty-aware hybrid FEA-AI multi-agent system finds better IPMSM designs than either pure FEA or pure AI search under the same high-fidelity simulation budget.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
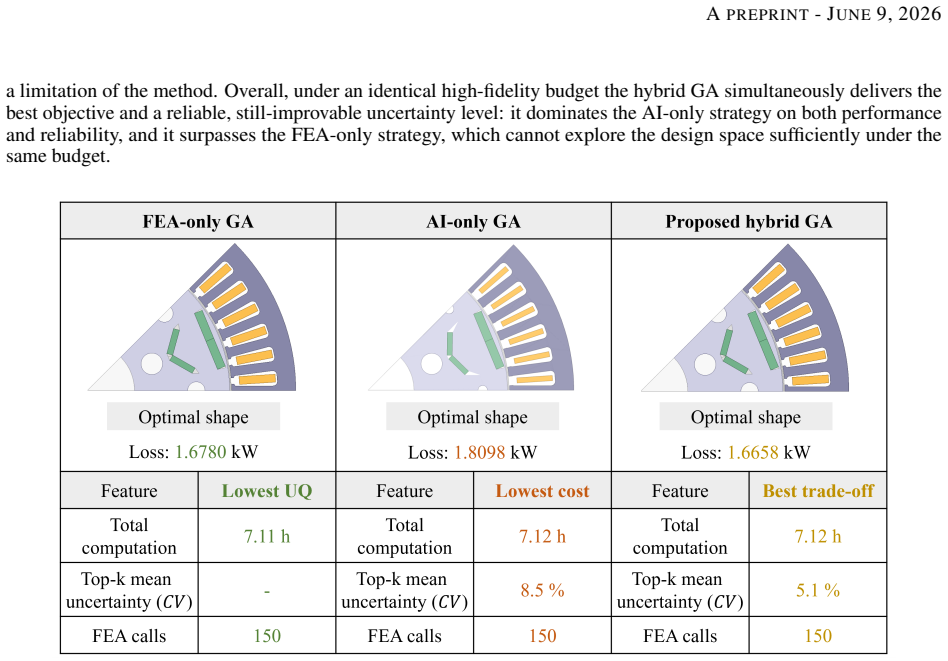
Under a matched high-fidelity FEA budget the hybrid approach achieves better objective performance while maintaining low and further reducible predictive uncertainty, outperforming FEA-only search, which is limited by early budget exhaustion, and AI-only search, which converges to a low-confidence optimum.
What carries the argument
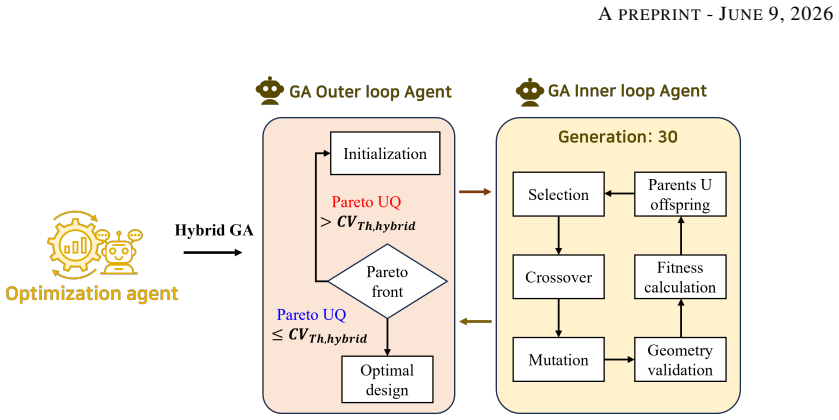
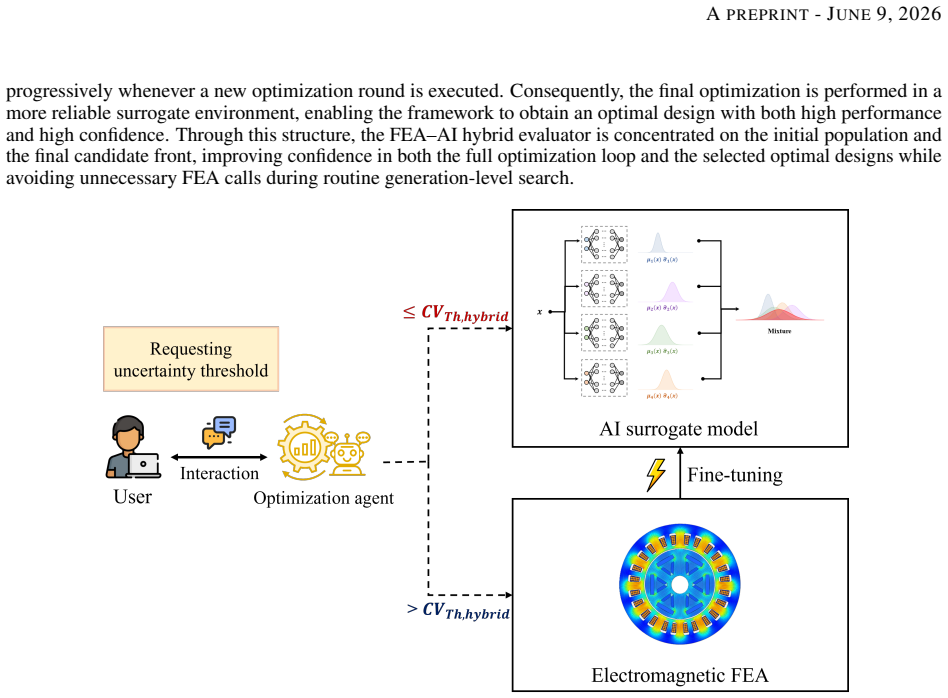
Uncertainty-driven switching rule inside the Optimization agent that routes low-uncertainty candidates to AI-surrogate inference and high-uncertainty or reliability-critical candidates to high-fidelity FEA for correction and retraining.
If this is right
- The same FEA budget yields designs with higher performance and lower predictive uncertainty than either baseline.
- Iterative retraining on FEA corrections keeps uncertainty low and further reducible across generations.
- Solver failures are automatically diagnosed and the design space is adaptively redefined without manual intervention.
- Targeted FEA on Pareto-front and top-K points produces more reliable fronts than surrogate-only search.
Where Pith is reading between the lines
- The same switching logic could be applied to other expensive multi-physics engineering domains that already use surrogates.
- If the uncertainty calibration generalizes, the framework could support closed-loop design cycles that reduce human oversight over successive projects.
- The RAG-based problem-definition step might allow the system to incorporate new design rules or material data without retraining the surrogate from scratch.
Load-bearing premise
The uncertainty estimates from the AI surrogate are sufficiently calibrated that the switching rule reliably decides when the surrogate can be trusted versus when full FEA is required.
What would settle it
A direct comparison on the same IPMSM problem showing that the hybrid Pareto front is no better than an FEA-only run once the uncertainty threshold or the number of FEA corrections is varied.
Figures

read the original abstract
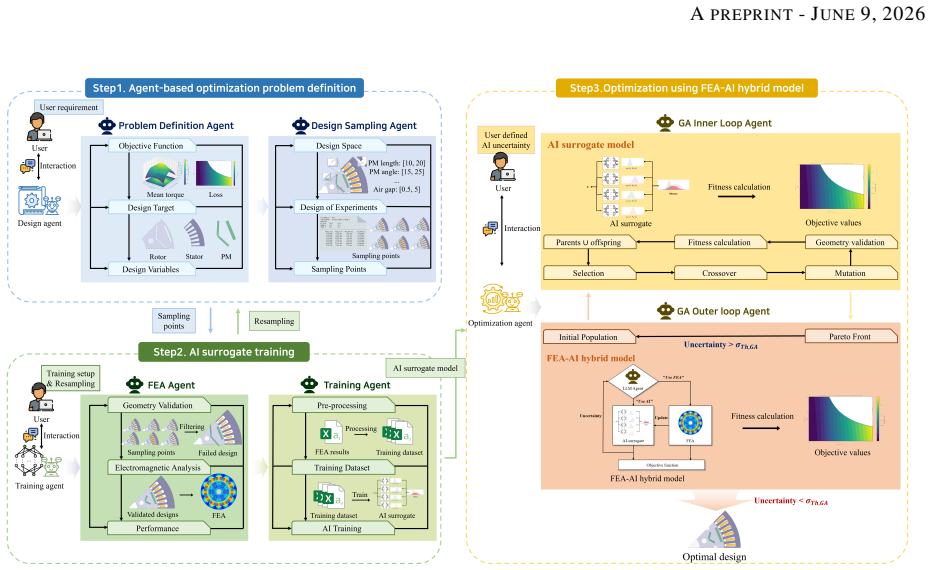
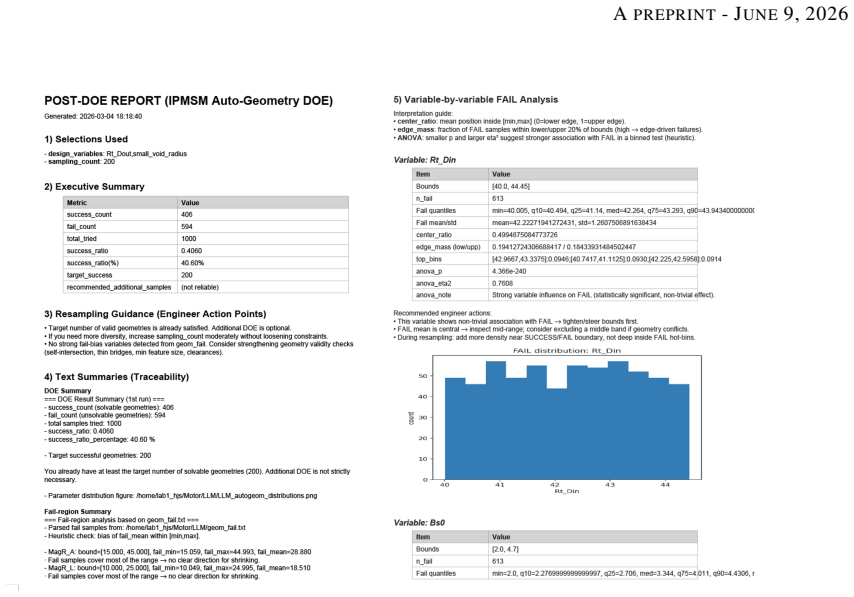
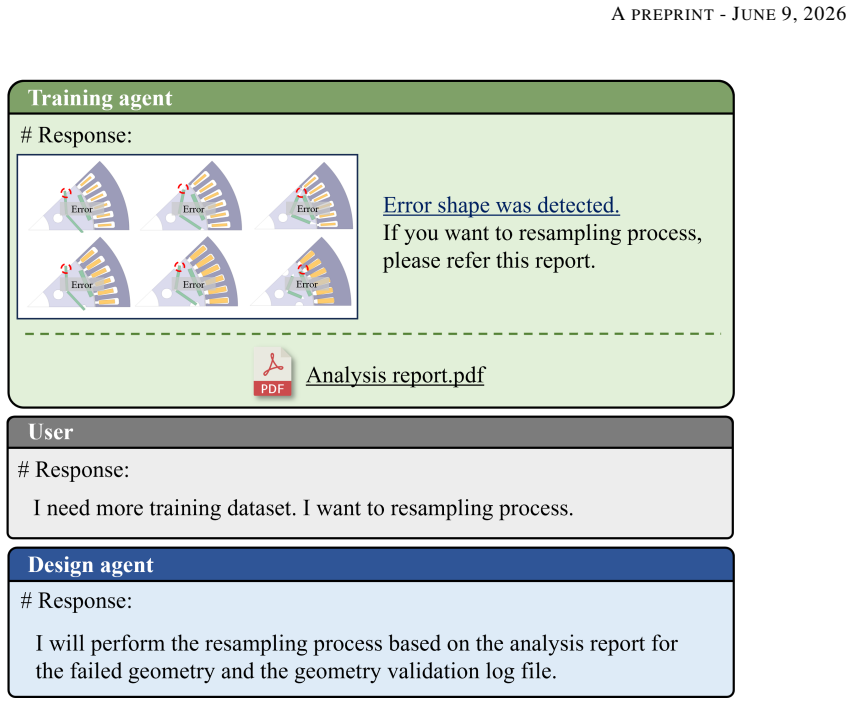
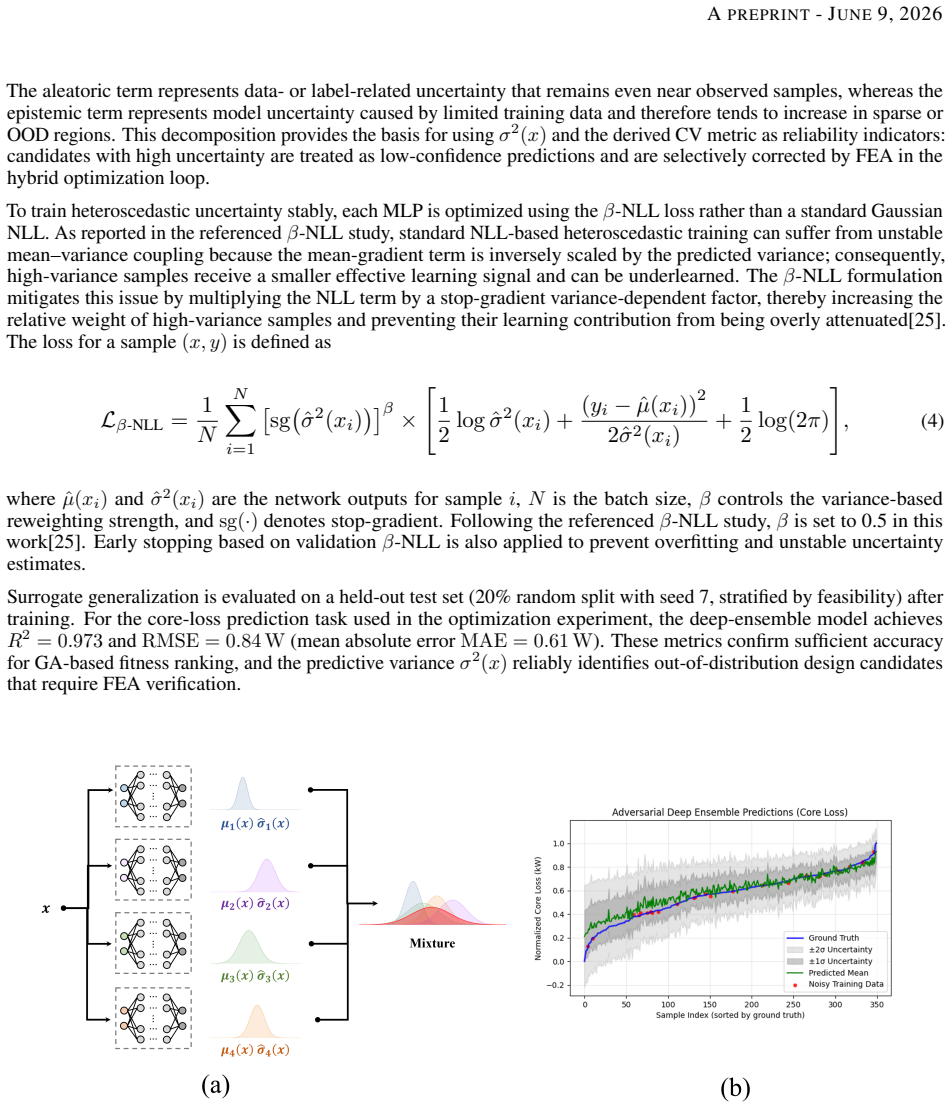
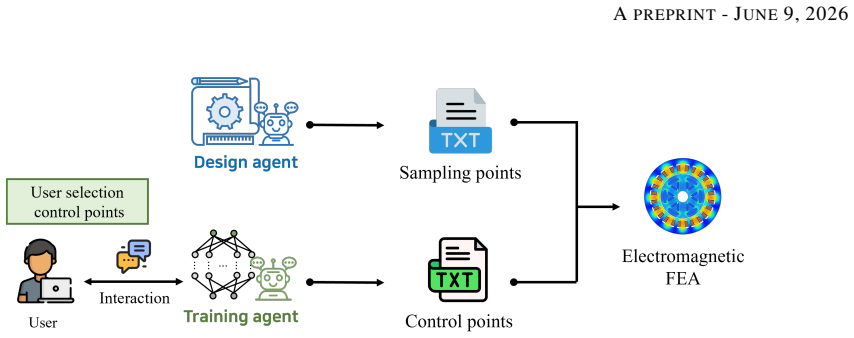
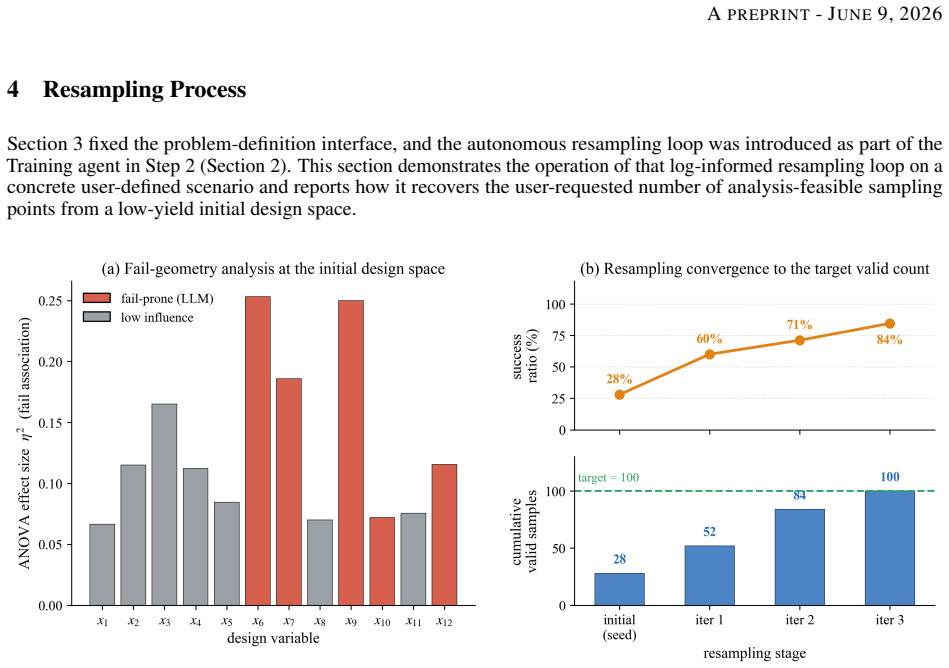
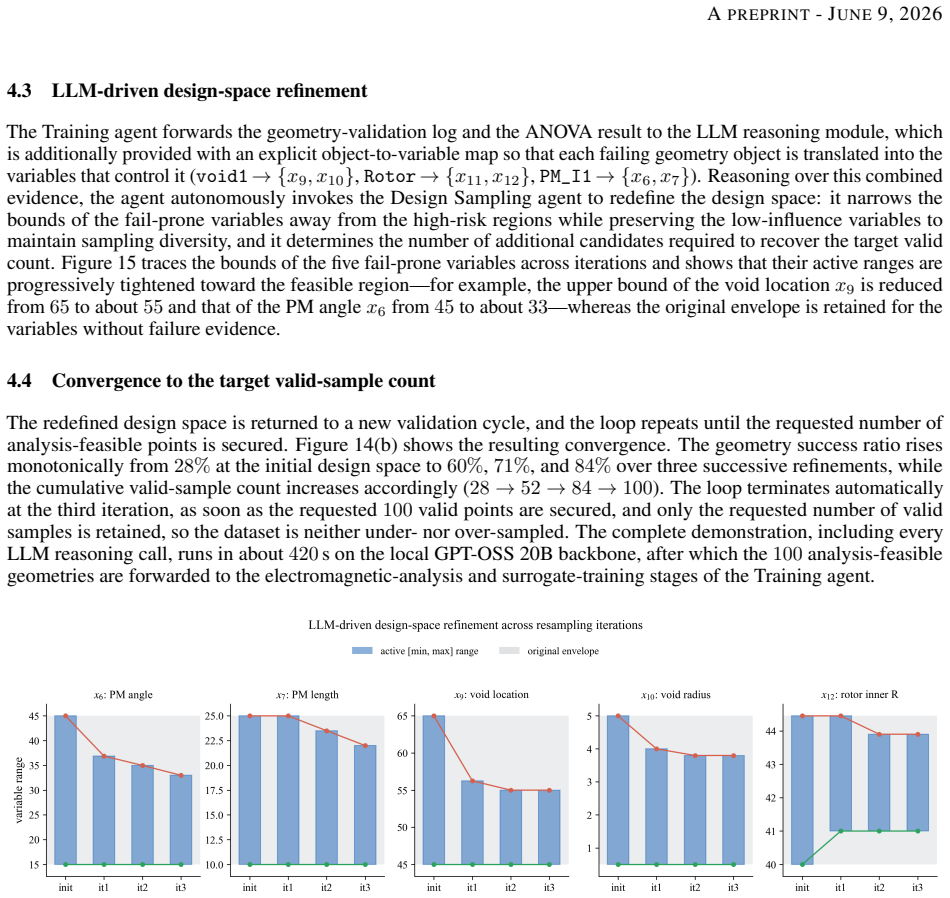
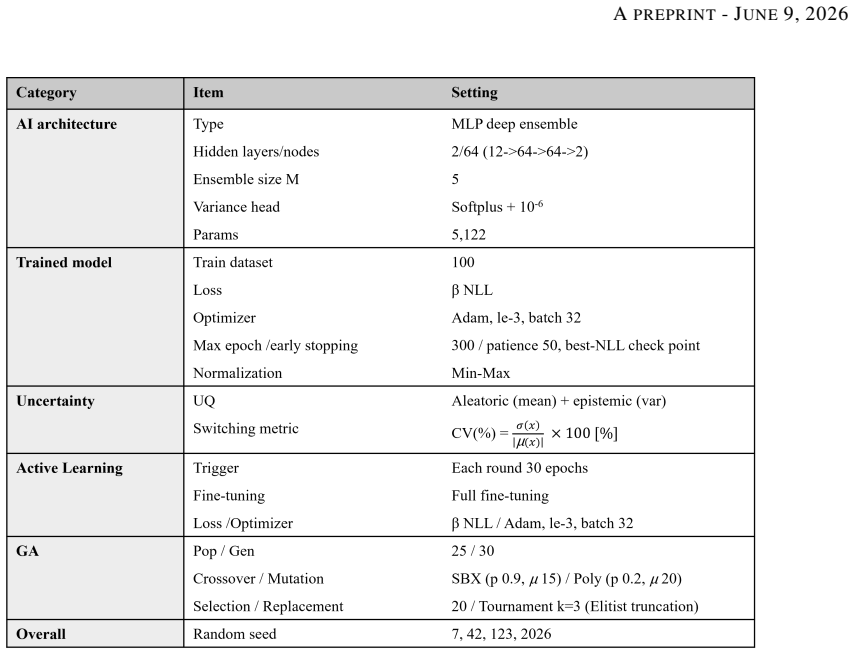
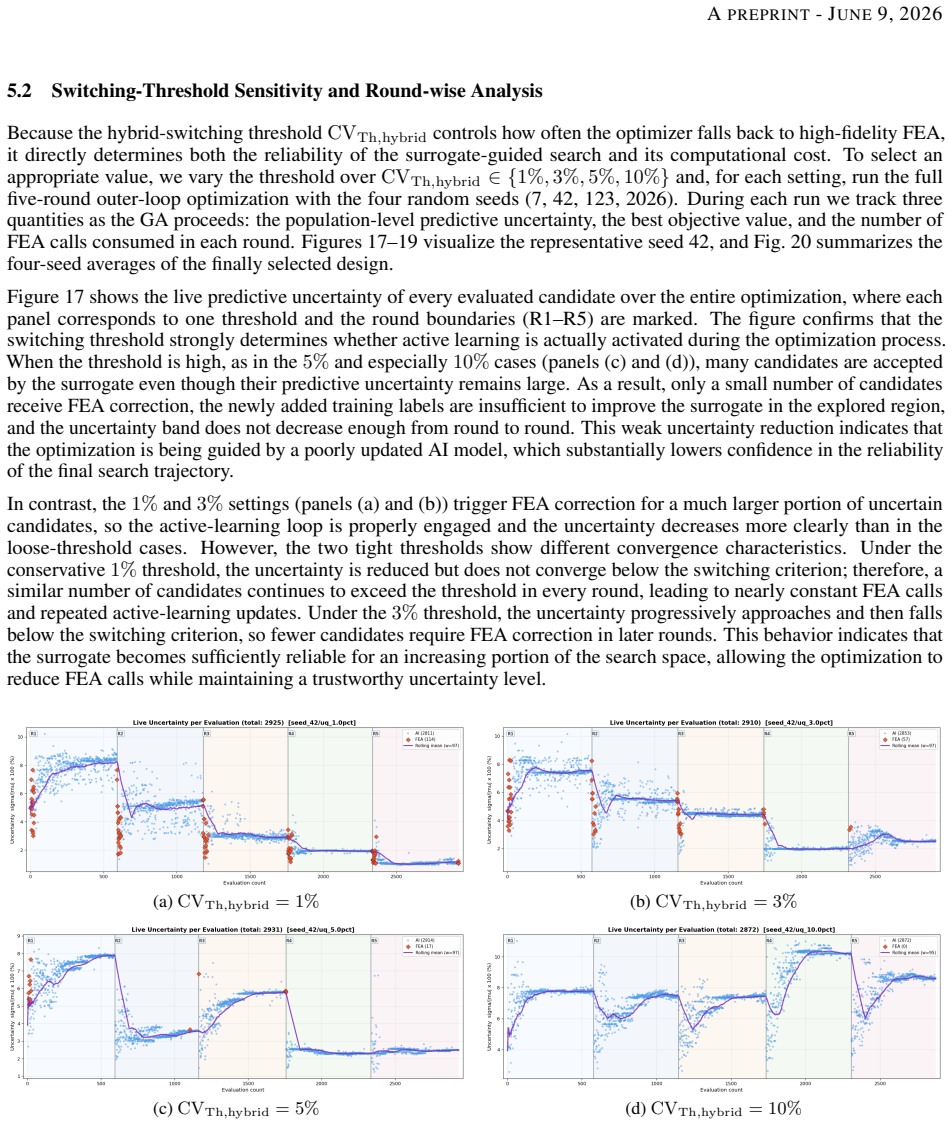
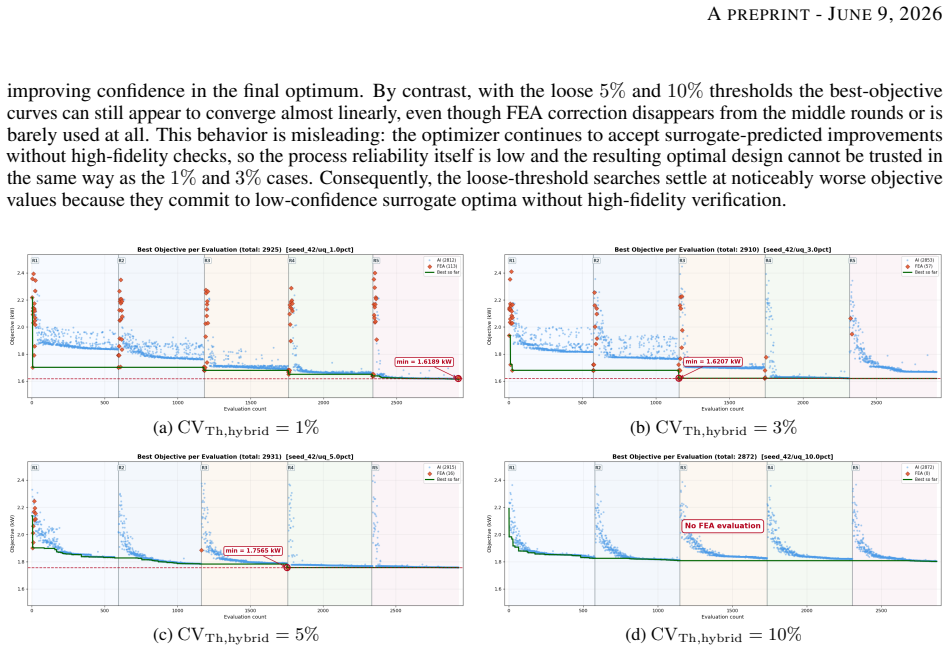
Interior permanent magnet synchronous motor (IPMSM) design requires balancing conflicting objectives and multi-physics constraints, while modern optimization workflows face three bottlenecks: manual problem setup, high finite element analysis (FEA) cost, and unreliable surrogate-based search in sparse or out-of-distribution regions. To address these limitations, we propose an end-to-end automated IPMSM design optimization framework that integrates retrieval-augmented generation (RAG) for structured problem definition with an uncertainty-aware FEA-AI hybrid optimization pipeline. A Design agent, connected to a motor textbook through RAG, provides domain-knowledge-based options and engineering tips, and compiles an optimization card and a design-of-experiments plan for AI-model training. A Training agent automates electromagnetic FEA, records geometry-validation and solver-failure logs, analyzes failed geometries using ANOVA-based data analysis and LLM reasoning, and invokes a Design Sampling agent to redefine the design space and generate additional samples. An Optimization agent performs GA-based search with uncertainty-driven switching: low-uncertainty candidates are evaluated by AI-surrogate inference, whereas high-uncertainty and reliability-critical Pareto-front or top-K candidates are corrected by high-fidelity FEA and reused for iterative retraining. The framework converts manual, experience-dependent configuration into a reproducible workflow that balances computational cost and prediction reliability. Experimental results under a matched high-fidelity FEA budget show that the proposed hybrid approach achieves better objective performance while maintaining low and further reducible predictive uncertainty, outperforming FEA-only search, which is limited by early budget exhaustion, and AI-only search, which converges to a low-confidence optimum.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes a multi-agent system for IPMSM design optimization that uses RAG to automate problem setup from motor textbooks, followed by agents that handle FEA data generation with failure logging and ANOVA analysis, and an optimization agent running GA search with uncertainty-driven switching between AI surrogate evaluations (low-uncertainty points) and high-fidelity FEA (high-uncertainty or Pareto-critical points). The central claim is that, under a matched high-fidelity FEA budget, this hybrid pipeline yields better objective values and lower/reducible predictive uncertainty than either FEA-only search (which exhausts the budget early) or AI-only search (which reaches low-confidence optima).
Significance. If the uncertainty calibration and switching rule are shown to be reliable without introducing systematic bias, the framework would represent a meaningful step toward reproducible, automated multi-physics design workflows that reduce manual configuration effort while controlling computational cost. The explicit integration of LLM agents for both setup and iterative data curation is a distinctive contribution relative to conventional surrogate-assisted optimization pipelines.
major comments (2)
- [Abstract and Optimization agent section] Abstract and § on Optimization agent (uncertainty-driven switching): the superiority claim under matched FEA budget depends on the switching rule correctly routing points; however, the manuscript provides no description of the uncertainty model (GP variance, ensemble variance, etc.), no calibration diagnostics (ECE, coverage on held-out or OOD geometries), and no check that miscalibration does not systematically favor surrogate use in regions where prediction error exceeds the reported uncertainty. This is load-bearing for the hybrid-benefit conclusion.
- [Experimental results] Experimental results section: the abstract asserts 'better objective performance' and 'low and further reducible predictive uncertainty' but supplies no numerical objective values, no baseline implementation details, no statistical significance tests, and no failure-rate or Pareto-front quality metrics. Without these, the cross-method comparison cannot be evaluated for robustness.
minor comments (2)
- [Abstract] The abstract would be strengthened by including at least one or two key quantitative results (e.g., objective improvement percentages or uncertainty reduction) to allow readers to gauge the magnitude of the claimed gains.
- [Design agent description] Notation for the 'optimization card' and 'design-of-experiments plan' generated by the Design agent is introduced without a clear definition or example; a short table or pseudocode would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting areas where additional detail and rigor are needed. We address each major comment below and commit to revisions that strengthen the manuscript without altering its core claims.
read point-by-point responses
-
Referee: [Abstract and Optimization agent section] Abstract and § on Optimization agent (uncertainty-driven switching): the superiority claim under matched FEA budget depends on the switching rule correctly routing points; however, the manuscript provides no description of the uncertainty model (GP variance, ensemble variance, etc.), no calibration diagnostics (ECE, coverage on held-out or OOD geometries), and no check that miscalibration does not systematically favor surrogate use in regions where prediction error exceeds the reported uncertainty. This is load-bearing for the hybrid-benefit conclusion.
Authors: We agree that the uncertainty model and validation are load-bearing for the hybrid-benefit claim and are insufficiently detailed in the current manuscript. The switching rule relies on ensemble variance from multiple surrogate models, but no calibration or bias analysis is provided. In the revised version we will add a dedicated subsection to the Optimization agent description specifying the ensemble-variance uncertainty estimator, include ECE and coverage-probability diagnostics on held-out and OOD geometries, and present an explicit check that miscalibration does not systematically route high-error points to the surrogate. Supporting figures and text will be added. revision: yes
-
Referee: [Experimental results] Experimental results section: the abstract asserts 'better objective performance' and 'low and further reducible predictive uncertainty' but supplies no numerical objective values, no baseline implementation details, no statistical significance tests, and no failure-rate or Pareto-front quality metrics. Without these, the cross-method comparison cannot be evaluated for robustness.
Authors: The full manuscript contains comparative tables and failure logs, yet we acknowledge that numerical values, baseline details, significance tests, and Pareto metrics are not presented with sufficient prominence or completeness for easy evaluation. In the revision we will expand the Experimental results section to display explicit objective values for all three methods, document surrogate architecture, training-set size and GA parameters, report p-values from repeated-run t-tests, and add failure rates together with Pareto-front metrics (hypervolume and spread). revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper presents an empirical multi-agent framework for IPMSM optimization, with performance claims resting on experimental comparisons of hybrid, FEA-only, and AI-only search under matched high-fidelity FEA budgets. No equations, fitted parameters presented as predictions, self-definitional steps, or load-bearing self-citations appear in the abstract or described workflow; the uncertainty-driven switching and retraining are operational mechanisms validated by observed results rather than by construction from inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Research on the performances and parameters of interior pmsm used for electric vehicles.IEEE Transactions on Industrial Electronics, 63(6):3533–3545, 2016
Xiangdong Liu, Hao Chen, Jing Zhao, and Anouar Belahcen. Research on the performances and parameters of interior pmsm used for electric vehicles.IEEE Transactions on Industrial Electronics, 63(6):3533–3545, 2016
2016
-
[2]
Comparison of induction and pm synchronous motor drives for ev application including design examples.IEEE Transactions on Industry Applications, 48(6):2322–2332, 2012
Gianmario Pellegrino, Alfredo Vagati, Barbara Boazzo, and Paolo Guglielmi. Comparison of induction and pm synchronous motor drives for ev application including design examples.IEEE Transactions on Industry Applications, 48(6):2322–2332, 2012
2012
-
[3]
Tae-Hyuk Ji, Chan-Ho Kim, Seok-Won Jung, and Sang-Yong Jung. Design method of ipmsm using multi-objective optimization considering mechanical stress for high-speed electric vehicles.Journal of Electrical Engineering & Technology, 19(4):2481–2489, 2024
2024
-
[4]
Multimodal design optimization of v-shaped magnet ipm synchronous machines.IEEE Transactions on Energy Conversion, 33(3):1547–1556, 2018
Buddhika De Silva Guruwatta Vidanalage, Mohammad Sedigh Toulabi, and Shaahin Filizadeh. Multimodal design optimization of v-shaped magnet ipm synchronous machines.IEEE Transactions on Energy Conversion, 33(3):1547–1556, 2018
2018
-
[5]
Design of a 35 kw permanent magnet synchronous motor for electric vehicle equipped with non-uniform air gap rotor.IEEE Transactions on Industry Applications, 59(1):1184–1198, 2022
Feng Liu, Xiuhe Wang, and Zezhi Xing. Design of a 35 kw permanent magnet synchronous motor for electric vehicle equipped with non-uniform air gap rotor.IEEE Transactions on Industry Applications, 59(1):1184–1198, 2022
2022
-
[6]
Tomoki Nakata, Masayuki Sanada, Shigeo Morimoto, and Yukinori Inoue. Automatic design of ipmsms using a genetic algorithm combined with the coarse-mesh fem for enlarging the high-efficiency operation area.IEEE Transactions on Industrial Electronics, 64(12):9721–9728, 2017
2017
-
[7]
A survey on large language model based autonomous agents.Frontiers of Computer Science, 18(6):186345, 2024
Lei Wang, Chen Ma, Xie Feng, Jiahui Zhang, Zeyu Duan, Bowen Zhao, Yuting Wang, Zhendong Zhang, Bo Yang, Qinglong Zheng, et al. A survey on large language model based autonomous agents.Frontiers of Computer Science, 18(6):186345, 2024
2024
-
[8]
Evaluation of different large language model agent frameworks for design engineering tasks
Alejandro Pradas Gómez, Massimo Panarotto, and Ola Isaksson. Evaluation of different large language model agent frameworks for design engineering tasks. InProceedings of NordDesign 2024: Design in the Era of Digitalization, AI and Augmented Intelligence, pages 693–702, 2024
2024
-
[9]
Generative ai-driven design optimization: Eight key application scenarios.JMST Advances, 7(1):105–111, 2025
Namwoo Kang. Generative ai-driven design optimization: Eight key application scenarios.JMST Advances, 7(1):105–111, 2025
2025
-
[10]
Meyarivan
Kalyanmoy Deb, Amrit Pratap, Sameer Agarwal, and T. Meyarivan. A fast and elitist multiobjective genetic algorithm: Nsga-ii.IEEE Transactions on Evolutionary Computation, 6(2):182–197, 2002
2002
-
[11]
Optimal shape design to improve torque characteristics of interior permanent magnet synchronous motor for small electric vehicles.Microsystem Technologies, 31(5):1203–1217, 2025
Hyeon-Jun Kim and Soo-Whang Baek. Optimal shape design to improve torque characteristics of interior permanent magnet synchronous motor for small electric vehicles.Microsystem Technologies, 31(5):1203–1217, 2025
2025
-
[12]
Topology optimization via machine learning and deep learning: a review.Journal of Computational Design and Engineering, 10(4):1736–1766, 2023
Seungyeon Shin, Dongju Shin, and Namwoo Kang. Topology optimization via machine learning and deep learning: a review.Journal of Computational Design and Engineering, 10(4):1736–1766, 2023
2023
-
[13]
Multi-objective surrogate optimization of mixed-variable ipm motor design problem with admm-based approach.Optimization and Engineering, pages 1–26, 2025
Tatsuya Asanuma and Yoshihiro Kanno. Multi-objective surrogate optimization of mixed-variable ipm motor design problem with admm-based approach.Optimization and Engineering, pages 1–26, 2025
2025
-
[14]
Simple and scalable predictive uncertainty estimation using deep ensembles
Balaji Lakshminarayanan, Alexander Pritzel, and Charles Blundell. Simple and scalable predictive uncertainty estimation using deep ensembles. InAdvances in Neural Information Processing Systems, 2017
2017
-
[15]
Comparative study of different data-driven surrogate models for optimization of synchronous reluctance machine.IEEE Transactions on Industry Applications, 2025
Yuancong Gong, Andreas Gneiting, Chongshen Zhao, Nejila Parspour, and Hao Chen. Comparative study of different data-driven surrogate models for optimization of synchronous reluctance machine.IEEE Transactions on Industry Applications, 2025
2025
-
[16]
Topology optimization for a spoke-type permanent magnet synchronous motor based on a siamese convolutional network
Yidan Ma, Zaixin Song, Yongtao Liang, and Jianfu Cao. Topology optimization for a spoke-type permanent magnet synchronous motor based on a siamese convolutional network. In2024 27th International Conference on Electrical Machines and Systems (ICEMS), pages 3346–3351. IEEE, 2024
2024
-
[17]
M. D. McKay, R. J. Beckman, and W. J. Conover. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code.Technometrics, 21(2):239–245, 1979
1979
-
[18]
Survey of hallucination in natural language generation.ACM Computing Surveys, 55(12):248:1– 248:38, 2023
Ziwei Ji, Nayeon Lee, Rita Frieske, Tiezheng Yu, Dan Su, Yan Xu, Etsuko Ishii, Yejin Bang, Andrea Madotto, and Pascale Fung. Survey of hallucination in natural language generation.ACM Computing Surveys, 55(12):248:1– 248:38, 2023
2023
-
[19]
uttler, Mike Lewis, Wen-tau Yih, Tim Rockt
Patrick Lewis, Ethan Perez, Aleksandra Piktus, Fabio Petroni, Vladimir Karpukhin, Naman Goyal, Heinrich K"uttler, Mike Lewis, Wen-tau Yih, Tim Rockt"aschel, Sebastian Riedel, and Douwe Kiela. Retrieval-augmented generation for knowledge-intensive nlp tasks. InAdvances in Neural Information Processing Systems, 2020. 25 APREPRINT- JUNE9, 2026
2020
-
[20]
Retrieval augmentation reduces hallucination in conversation
Kurt Shuster, Spencer Poff, Moya Chen, Douwe Kiela, and Jason Weston. Retrieval augmentation reduces hallucination in conversation. InFindings of the Association for Computational Linguistics: EMNLP 2021, pages 3784–3803, 2021
2021
-
[21]
CRC press, 2009
Jacek F Gieras.Permanent magnet motor technology: design and applications. CRC press, 2009
2009
-
[22]
The probabilistic relevance framework: BM25 and beyond.Foundations and Trends in Information Retrieval, 3(4):333–389, 2009
Stephen Robertson and Hugo Zaragoza. The probabilistic relevance framework: BM25 and beyond.Foundations and Trends in Information Retrieval, 3(4):333–389, 2009
2009
-
[23]
Cormack, Charles L
Gordon V . Cormack, Charles L. A. Clarke, and Stefan Büttcher. Reciprocal rank fusion outperforms Condorcet and individual rank learning methods. InProceedings of the 32nd International ACM SIGIR Conference on Research and Development in Information Retrieval, pages 758–759. ACM, 2009
2009
-
[24]
What uncertainties do we need in bayesian deep learning for computer vision? In Advances in Neural Information Processing Systems, volume 30, 2017
Alex Kendall and Yarin Gal. What uncertainties do we need in bayesian deep learning for computer vision? In Advances in Neural Information Processing Systems, volume 30, 2017
2017
-
[25]
Maximilian Seitzer, Arash Tavakoli, Dimitrije Antic, and Georg Martius. On the pitfalls of heteroscedastic uncertainty estimation with probabilistic neural networks.arXiv preprint arXiv:2203.09168, 2022
-
[26]
Uncertainty of measurement: a review of the rules for calculating uncertainty components through functional relationships.The Clinical Biochemist Reviews, 33(2):49, 2012
Ian Farrance and Richard Frenkel. Uncertainty of measurement: a review of the rules for calculating uncertainty components through functional relationships.The Clinical Biochemist Reviews, 33(2):49, 2012. 26
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.