A no-go theorem for privacy in distributed sensing using Gaussian states
Pith reviewed 2026-06-26 08:02 UTC · model grok-4.3
The pith
Perfect privacy cannot be achieved in any distributed sensing protocol that uses Gaussian states.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
No distributed sensing protocol using Gaussian resource states can achieve perfect privacy, meaning that local parameters cannot be completely hidden from all parties while learning a global function of the systems.
What carries the argument
The no-go theorem showing that Gaussian states cannot satisfy the privacy conditions for distributed sensing, together with the introduced relative privacy measure.
If this is right
- Any protocol using Gaussian states will leak some information about local parameters to the parties.
- A relative privacy measure can bound the achievable privacy in Gaussian protocols.
- Achieving perfect privacy requires resource states beyond Gaussian ones.
Where Pith is reading between the lines
- This implies that non-Gaussian states should be explored for privacy-preserving distributed sensing.
- Hybrid discrete-continuous variable protocols might combine the advantages of both.
- The result limits the use of common Gaussian resources like squeezed states in secure sensing applications.
Load-bearing premise
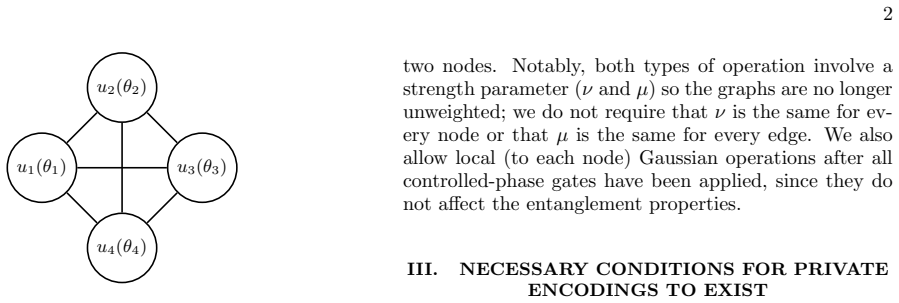
The protocols are restricted to Gaussian resource states and privacy requires that local parameters remain completely hidden from all parties.
What would settle it
A concrete counterexample of a Gaussian-state distributed sensing protocol that achieves complete hiding of local parameters while learning the global function would falsify the theorem.
Figures
read the original abstract
In the discrete variable setting, entangled resource states allow a set of parties to learn a global function of a set of spatially separated systems, whilst keeping the local parameters of those systems completely private. In the continuous variable setting, distributed sensing has been carried out using Gaussian resource states, but without the same guarantees about privacy. Here, we show that perfect privacy is impossible to achieve for any distributed sensing protocol that uses Gaussian states as a resource. We also introduce a measure of relative privacy, bounding the degree to which any Gaussian distributed sensing protocol can keep local parameters hidden.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript establishes a no-go theorem proving that perfect privacy—defined as learning a global function of spatially separated systems while keeping all local parameters completely hidden—cannot be achieved by any distributed sensing protocol that employs Gaussian states as resources in the continuous-variable setting. This is contrasted with the discrete-variable case where entangled resources permit such privacy. The authors additionally introduce and analyze a relative privacy measure that quantifies the maximum privacy achievable under Gaussian constraints.
Significance. If the central derivation holds, the result is significant for continuous-variable quantum metrology: Gaussian states are experimentally accessible and widely employed, yet the theorem shows they are fundamentally insufficient for perfect privacy in distributed sensing tasks. The relative privacy measure supplies a concrete, quantitative bound that can guide protocol design and highlights the necessity of non-Gaussian resources when privacy is required. The work therefore supplies both a negative result and a practical diagnostic tool.
minor comments (3)
- [Abstract] The abstract introduces the relative privacy measure without a one-sentence characterization of its functional form or normalization; adding this would improve immediate readability.
- Notation for the privacy measure (e.g., any subscript or argument indicating the global function versus local parameters) should be introduced explicitly at its first appearance in the main text.
- Figure captions should explicitly state whether plotted curves correspond to the relative privacy bound derived in the theorem or to numerical examples.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of our manuscript and for recommending minor revision. No major comments were raised, indicating that the central no-go theorem and the relative privacy measure are viewed as sound. We will address any minor points in the revised version.
Circularity Check
No significant circularity detected
full rationale
The paper establishes a no-go theorem for perfect privacy in Gaussian-state distributed sensing via direct analysis of covariance matrices and measurement outcomes in the continuous-variable setting. The derivation relies on standard properties of Gaussian states (e.g., symplectic transformations and partial traces) and a privacy definition that requires local parameters to be information-theoretically hidden while a global function is learned; neither the theorem statement nor the relative-privacy measure reduces to a fitted parameter, self-citation chain, or definitional loop. The argument is scoped explicitly to Gaussian resources and contrasts with the discrete-variable case without importing uniqueness results from the authors' prior work. No load-bearing step equates a prediction or claim to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Gaussian states are the only resource states considered for the distributed sensing protocols
- domain assumption Privacy requires that local parameters remain completely hidden while the global function is learned
invented entities (1)
-
relative privacy measure
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Denote the average photon number of Tr x[|ψ⟩⟨ψ|] (i.e., the average photon number of modex) as ¯n
-
[2]
Label its two modesS(sig- nal) andI(idler)
Denote the TMSV whose average photon num- ber per mode is ¯nas|Ψ ¯n⟩(equivalently, this is the TMSV parametrised by squeezing parameter r= 1 2arccosh[2¯n+ 1]). Label its two modesS(sig- nal) andI(idler)
-
[3]
Φ |ψ⟩,x,y could be either a single mode channel or a two-mode channel, in which case we define it as acting on both the idler mode and a vacuum mode
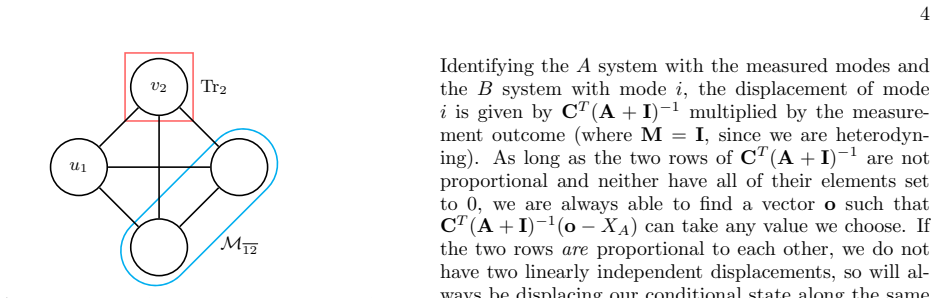
For any|ψ⟩and pair of parties,xandy, there exists a Gaussian noise channel, Φ|ψ⟩,x,y, such that apply- ing it to the idler mode of|Ψ ¯n⟩results in a state that is identical to Try[|ψ⟩⟨ψ|] up to local unitaries (i.e., unitaries acting separately on modexand the set of modes xy). Φ |ψ⟩,x,y could be either a single mode channel or a two-mode channel, in whic...
-
[4]
We can therefore relate the proportion of information that cannot be hidden to the robustness of a TMSV to a particular noise channel
The ratioR xy can now be calculated as Rxy = min ˆH " QFIϕ eiϕ ˆH ⊗Φ |ψ⟩,x,y |Ψ¯n⟩ QFIϕ eiϕ ˆH ⊗I |Ψ¯n⟩ # ,(8) where the structure of the initial resource features only in the particular noise channel considered. We can therefore relate the proportion of information that cannot be hidden to the robustness of a TMSV to a particular noise channel. The remai...
-
[5]
T. J. Proctor, P. A. Knott, and J. A. Dunningham, Mul- tiparameter estimation in networked quantum sensors, Physical Review Letters120, 080501 (2018)
2018
-
[6]
Zhuang, Z
Q. Zhuang, Z. Zhang, and J. H. Shapiro, Distributed quantum sensing using continuous-variable multipartite entanglement, Physical Review A97, 032329 (2018)
2018
-
[7]
W. Ge, K. Jacobs, Z. Eldredge, A. V. Gorshkov, and M. Foss-Feig, Distributed Quantum Metrology with Lin- ear Networks and Separable Inputs, Physical Review Let- ters121, 043604 (2018)
2018
-
[8]
Shettell and D
N. Shettell and D. Markham, Graph States as a Resource for Quantum Metrology, Phys. Rev. Lett.124, 110502 (2020)
2020
-
[9]
N. Shettell, M. Hassani, and D. Markham, Private net- work parameter estimation with quantum sensors (2022), arXiv:2207.14450 [quant-ph]
arXiv 2022
-
[10]
Hassani, S
M. Hassani, S. Scheiner, M. G. A. Paris, and D. Markham, Privacy in Networks of Quantum Sensors, Phys. Rev. Lett.134, 030802 (2025)
2025
-
[11]
Bugalho, M
L. Bugalho, M. Hassani, Y. Omar, and D. Markham, Pri- vate and Robust States for Distributed Quantum Sens- ing, Quantum9, 1596 (2025)
2025
-
[12]
Eldredge, M
Z. Eldredge, M. Foss-Feig, J. A. Gross, S. L. Rolston, and A. V. Gorshkov, Optimal and secure measurement protocols for quantum sensor networks, Physical Review A97, 042337 (2018)
2018
-
[13]
Gatto, P
D. Gatto, P. Facchi, F. A. Narducci, and V. Tamma, Distributed quantum metrology with a single squeezed- vacuum source, Phys. Rev. Res.1, 032024 (2019)
2019
-
[14]
X. Guo, C. R. Breum, J. Borregaard, S. Izumi, M. V. Larsen, T. Gehring, M. Christandl, J. S. Neergaard- Nielsen, and U. L. Andersen, Distributed quantum sens- ing in a continuous-variable entangled network, Nat. Phys.16, 281 (2020)
2020
-
[15]
A. d. O. Junior, A. L. Andersen, B. L. Larsen, S. W. Moore, D. Markham, M. Takeoka, J. B. Brask, and U. L. Andersen, Privacy in continuous-variable distributed quantum sensing (2025), arXiv:2509.12338 [quant-ph]
arXiv 2025
-
[16]
M. Hein, W. D¨ ur, J. Eisert, R. Raussendorf, M. V. den Nest, and H.-J. Briegel, Entanglement in Graph States and its Applications (2006), arXiv:quant-ph/0602096
Pith/arXiv arXiv 2006
-
[17]
M. Gu, C. Weedbrook, N. C. Menicucci, T. C. Ralph, and P. van Loock, Quantum computing with continuous- variable clusters, Phys. Rev. A79, 062318 (2009)
2009
-
[18]
N. C. Menicucci, S. T. Flammia, and P. van Loock, Graphical calculus for Gaussian pure states, Phys. Rev. A83, 042335 (2011)
2011
-
[19]
Serafini, G
A. Serafini, G. Adesso, and F. Illuminati, Unitarily lo- calizable entanglement of Gaussian states, Phys. Rev. A 71, 032349 (2005)
2005
-
[20]
Weedbrook, S
C. Weedbrook, S. Pirandola, R. Garc´ ıa-Patr´ on, N. J. Cerf, T. C. Ralph, J. H. Shapiro, and S. Lloyd, Gaus- sian quantum information, Reviews of Modern Physics 84, 621 (2012)
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.