An LLM-Based Assistance System for Intuitive and Flexible Capability-Based Planning
Pith reviewed 2026-06-29 12:28 UTC · model grok-4.3
The pith
An LLM layer added to formal SMT planning enables natural-language queries and model adaptations while preserving symbolic correctness via human approval.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
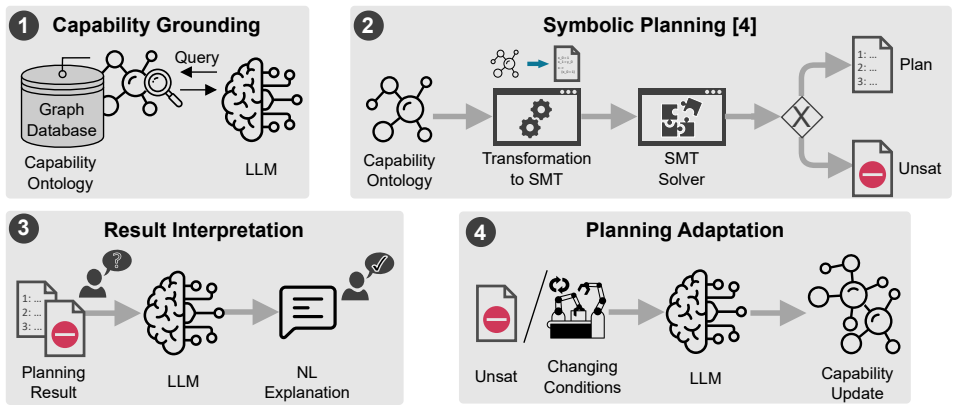
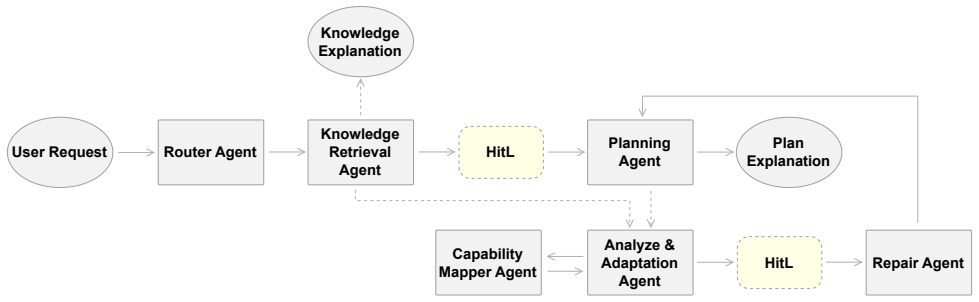
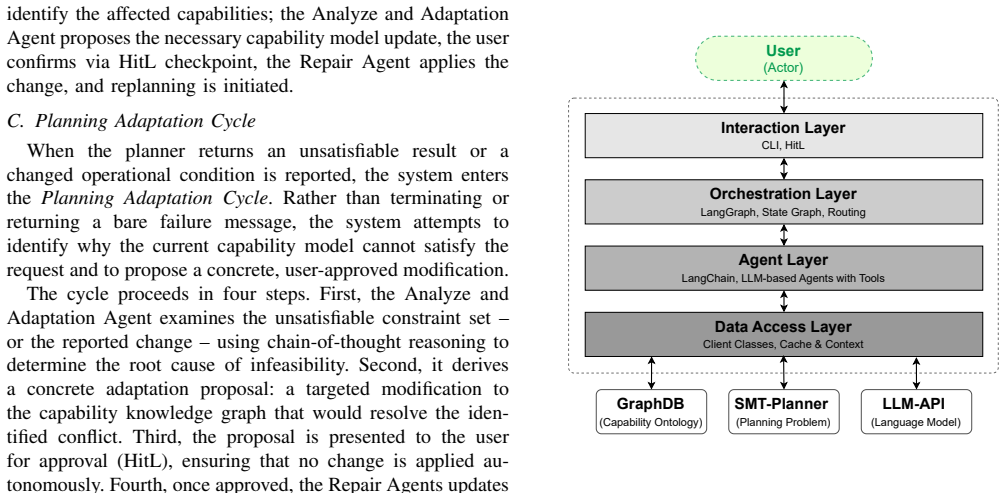
The paper claims that a four-component architecture—Capability Grounding, Symbolic Planning, Result Interpretation, and Planning Adaptation—implemented as a routed agentic workflow with five specialized agents, augments an SMT planner so that formal correctness stays with the symbolic component while the LLM layer supplies natural-language interaction and flexible knowledge-model adaptation under human-in-the-loop approval. On a modular production system this yields correct handling of nine of ten knowledge queries, all four satisfiable planning cases, three of four unsatisfiable cases with concrete repair proposals, and all five adaptive scenarios that reach satisfiable plans via user-appro
What carries the argument
The routed agentic workflow with five specialized agents that delegates between the LLM layer for natural-language tasks and the underlying SMT planner for formal correctness.
If this is right
- Non-experts gain the ability to query planning systems and receive explanations in everyday language.
- Unsatisfiable planning requests can be diagnosed and repaired through LLM-generated proposals that humans then approve.
- Knowledge models can be updated dynamically to reflect changing operational conditions without losing formal planning guarantees.
- The same architecture supports iterative adaptation loops that turn initially infeasible requests into valid plans.
Where Pith is reading between the lines
- The human-approval step may reduce the practical risk of LLM hallucinations affecting final plans, though this depends on user vigilance.
- The pattern of separating formal reasoning from language-based interaction could apply to other symbolic methods used in engineering domains.
- Over repeated use the system might accumulate a library of approved adaptations that further speed future planning tasks.
Load-bearing premise
The LLM produces natural-language interpretations and adaptation proposals that, once a human approves them, leave the knowledge model consistent enough for the SMT planner to retain its formal guarantees.
What would settle it
A concrete test case in which a human-approved LLM-proposed model change leads the SMT planner to output a plan that violates one or more capability constraints stated in the original model.
Figures
read the original abstract
In modern industry, dynamic environments and the complexity of modular and reconfigurable resources require automated planning of process sequences. Capability-based planning approaches address this by automatically generating plans from semantic knowledge models that describe resource functions in a machine-interpretable form. Their practical use, however, remains limited: solver feedback, especially in the case of unsatisfiability, is difficult to interpret, and the knowledge models require adaptation as operational conditions change or requests become infeasible. This paper presents a hybrid assistance system that augments an existing capability-based Satisfiability Modulo Theories (SMT) planning approach with an Large Language Model (LLM)-based layer for natural-language interaction, explanation, and adaptation. Formal planning correctness remains with the symbolic planner, while the LLM layer handles natural-language access and flexible knowledge model adaptation under explicit Human-in-the-Loop (HitL) approval. The system decomposes into four components: Capability Grounding, Symbolic Planning, Result Interpretation, and Planning Adaptation, realized as a routed agentic workflow in which a central router delegates to five specialized agents. The system is evaluated on a modular production system across four scenario types. Of 23 test cases, 9 of 10 knowledge queries and all 4 satisfiable planning cases were handled correctly, 3 of 4 unsatisfiable cases produced concrete repair proposals, and all 5 adaptive planning scenarios resolved into satisfiable plans through iterative, user-approved knowledge model modifications. The findings confirm that combining formal planning with LLM-based assistance substantially improves accessibility and adaptability in industrial automation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a hybrid assistance system augmenting an SMT-based capability planning approach with an LLM layer for natural-language interaction, explanation, and adaptation under explicit Human-in-the-Loop approval. Formal correctness is retained by the symbolic planner while the LLM handles accessibility and flexible model changes; the system is realized as a four-component routed agentic workflow and evaluated on 23 test cases across four scenario types in a modular production system, reporting 9/10 correct knowledge queries, 4/4 satisfiable cases, 3/4 unsatisfiable cases yielding repair proposals, and 5/5 adaptive scenarios resolved via iterative user-approved modifications.
Significance. If the claimed separation of concerns holds and human approval reliably prevents semantic drift, the work could meaningfully improve practical adoption of capability-based planning in reconfigurable industrial automation by addressing solver feedback interpretability and model adaptability. The concrete success counts on explicit test cases are a positive feature, but the evaluation design leaves open whether LLM-proposed changes preserve the original capability semantics used by the SMT solver.
major comments (3)
- [Abstract / Evaluation] Abstract and evaluation description: success on the 5 adaptive scenarios and 3/4 unsatisfiable cases is measured solely by the SMT planner eventually returning a plan after the LLM-proposed modification; no re-encoding or equivalence check against the original capability model is reported, leaving the central claim that 'formal planning correctness remains with the symbolic planner' only partially supported.
- [System architecture] Architecture description (four components and HitL approval): the claim that the LLM layer supplies only natural-language access and adaptation proposals without altering formal semantics relies on human approval catching any drift, yet no details are given on the information presented to the human approver or any automated guardrails that would detect semantic changes before approval.
- [System components] Result Interpretation and Planning Adaptation components: the routed agentic workflow delegates to specialized agents, but the manuscript provides no mechanism or test showing that LLM-generated repairs or adaptations are semantically equivalent to the original knowledge model before being fed back to the SMT planner.
minor comments (2)
- [Abstract] The abstract states 'all 5 adaptive planning scenarios resolved into satisfiable plans' but does not specify the exclusion criteria or scenario definitions used to select the 23 test cases, which would aid reproducibility.
- [System description] Notation for the five specialized agents and the central router is introduced without an accompanying diagram or pseudocode that would clarify the delegation logic.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for stronger support of the formal-correctness claim and clearer details on human oversight. We address each major comment below, indicating revisions where the manuscript requires clarification or expansion.
read point-by-point responses
-
Referee: [Abstract / Evaluation] Abstract and evaluation description: success on the 5 adaptive scenarios and 3/4 unsatisfiable cases is measured solely by the SMT planner eventually returning a plan after the LLM-proposed modification; no re-encoding or equivalence check against the original capability model is reported, leaving the central claim that 'formal planning correctness remains with the symbolic planner' only partially supported.
Authors: We agree that the reported success counts demonstrate that the SMT solver produces plans after the modifications but do not include an automated equivalence or re-encoding check between the original and modified capability models. The central claim rests on the fact that every plan is generated exclusively by the SMT planner operating on the final, human-approved model; the LLM never executes planning. Nevertheless, the absence of an explicit semantic-equivalence verification means the claim is supported only under the assumption that human approval preserves intended semantics. We will revise the evaluation and discussion sections to explicitly state this reliance and to note the lack of automated checks as a limitation. revision: yes
-
Referee: [System architecture] Architecture description (four components and HitL approval): the claim that the LLM layer supplies only natural-language access and adaptation proposals without altering formal semantics relies on human approval catching any drift, yet no details are given on the information presented to the human approver or any automated guardrails that would detect semantic changes before approval.
Authors: The manuscript indeed provides only a high-level description of the HitL step. In the implemented system the approver is shown (i) the original capability-model excerpts, (ii) the natural-language request, and (iii) the LLM-proposed textual changes together with a side-by-side diff of the affected predicates. No automated guardrails are present; the design intentionally leaves semantic validation to the human. We will expand the architecture section with these concrete details and will add a short paragraph discussing the deliberate absence of automated drift detection. revision: yes
-
Referee: [System components] Result Interpretation and Planning Adaptation components: the routed agentic workflow delegates to specialized agents, but the manuscript provides no mechanism or test showing that LLM-generated repairs or adaptations are semantically equivalent to the original knowledge model before being fed back to the SMT planner.
Authors: No automated mechanism or test for semantic equivalence is implemented or reported. The workflow relies on explicit human approval of each proposed change before the updated model is passed to the SMT planner; this is a deliberate architectural choice that keeps formal semantics under human control rather than under an automated verifier. We will revise the component descriptions to state this design decision explicitly and to discuss its implications for the correctness claim. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper is a system-description and evaluation manuscript with no mathematical derivation chain, parameter fitting, or load-bearing self-citations. Its claims rest on an explicit four-component architecture, a routed agentic workflow, and tabulated results from 23 hand-specified test cases (9/10 queries, 4/4 satisfiable, 3/4 unsatisfiable with proposals, 5/5 adaptive scenarios). These outcomes are reported as direct observations rather than predictions derived from fitted inputs or prior self-authored uniqueness theorems; the formal-correctness guarantee is stated to remain with the external SMT planner under human approval, without any reduction of that guarantee to the LLM layer by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The underlying SMT planner maintains formal correctness when the knowledge model is modified only under explicit human approval.
Reference graph
Works this paper leans on
-
[1]
Recommendations for implementing the strategic initiative INDUSTRIE 4.0: Final report of the Industrie 4.0 Working Group
H. Kagermann, W. Wahlster, and J. Helbig, “Recommendations for implementing the strategic initiative INDUSTRIE 4.0: Final report of the Industrie 4.0 Working Group.”
-
[2]
Industry 4.0: A survey on technologies, applications and open research issues,
Y . Lu, “Industry 4.0: A survey on technologies, applications and open research issues,”Journal of Industrial Information Integration, vol. 6, pp. 1–10, 2017
2017
-
[3]
Ghallab, D
M. Ghallab, D. S. Nau, and P. Traverso,Automated planning: Theory and practice, ser. The Morgan Kaufmann Series in Artificial Intelligence. Amsterdam: Elsevier/Morgan Kaufmann, 2004
2004
-
[4]
Automated Process Planning Based on a Semantic Capability Model and SMT,
A. K ¨ocher, L. M. Vieira da Silva, and A. Fay, “Automated Process Planning Based on a Semantic Capability Model and SMT,” inAAAI Workshop on AI Planning for Cyber-Physical Systems (CAIPI), 2024
2024
-
[5]
Ghallab, D
M. Ghallab, D. S. Nau, and P. Traverso,Acting, planning, and learning. Cambridge and New York, NY and Port Melbourne and New Delhi and Singapore: Cambridge University Press, 2025
2025
-
[6]
Chain-of-Thought Prompting Elicits Reasoning in Large Language Models,
J. Wei, X. Wanget al., “Chain-of-Thought Prompting Elicits Reasoning in Large Language Models,” inAdvances in Neural Information Pro- cessing Systems, S. Koyejo, S. Mohamedet al., Eds., vol. 35. Curran Associates, Inc, 2022
2022
-
[7]
PlanGenLLMs: A Modern Survey of LLM Planning Capabilities,
H. Wei, Z. Zhanget al., “PlanGenLLMs: A Modern Survey of LLM Planning Capabilities,” inProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), W. Che, J. Nabendeet al., Eds. Vienna, Austria: Association for Computational Linguistics, 2025, pp. 19 497–19 521
2025
-
[8]
Reasoning with Language Model is Planning with World Model,
S. Hao, Y . Guet al., “Reasoning with Language Model is Planning with World Model,” inProceedings of the 2023 Conference on Empirical Methods in Natural Language Processing, H. Bouamor, J. Pino, and K. Bali, Eds. Stroudsburg, PA, USA: Association for Computational Linguistics, 2023, pp. 8154–8173
2023
-
[9]
On the Prospects of Incorporating Large Language Models (LLMs) in Automated Planning and Scheduling (APS),
V . Pallagani, B. C. Muppasaniet al., “On the Prospects of Incorporating Large Language Models (LLMs) in Automated Planning and Scheduling (APS),”Proceedings of the International Conference on Automated Planning and Scheduling, vol. 34, pp. 432–444, 2024
2024
-
[10]
Strips: A new approach to the application of theorem proving to problem solving,
R. E. Fikes and N. J. Nilsson, “Strips: A new approach to the application of theorem proving to problem solving,”Artificial Intelligence, vol. 2, no. 3-4, pp. 189–208, 1971
1971
-
[11]
PDDL - The Planning Domain Definition Language,
M. Ghallab, C. Knoblocket al., “PDDL - The Planning Domain Definition Language,”Golden, S. Penberthy, DE Smith, Y. Sun, D. Weld, and D. Mcdermott, The planning domain definition language, Yale CVC, Tech. Rep, 1998
1998
-
[12]
Planning for Hybrid Systems via Satisfiability Modulo Theories,
M. Cashmore, D. Magazzeni, and P. Zehtabi, “Planning for Hybrid Systems via Satisfiability Modulo Theories,”Journal of Artificial In- telligence Research, vol. 67, pp. 235–283, 2020
2020
-
[13]
Automated process planning for cyber- physical production systems,
A. Rogalla and O. Niggemann, “Automated process planning for cyber- physical production systems,” in2017 22nd IEEE International Confer- ence on Emerging Technologies and Factory Automation. Piscataway, NJ: IEEE, 2017, pp. 1–8
2017
-
[14]
A reference model for common un- derstanding of capabilities and skills in manufacturing,
A. K ¨ocher, A. Belyaevet al., “A reference model for common un- derstanding of capabilities and skills in manufacturing,”at - Automa- tisierungstechnik, vol. 71, no. 2, pp. 94–104, 2023
2023
-
[15]
Describe, explain, plan and select: interactive planning with large language models enables open-world multi-task agents,
Z. Wang, S. Caiet al., “Describe, explain, plan and select: interactive planning with large language models enables open-world multi-task agents,” inProceedings of the 37th International Conference on Neural Information Processing Systems, ser. NIPS ’23. Red Hook, NY , USA: Curran Associates Inc, 2023
2023
-
[16]
Language agent tree search unifies reasoning, acting, and planning in language models,
A. Zhou, K. Yanet al., “Language agent tree search unifies reasoning, acting, and planning in language models,” inProceedings of the 41st In- ternational Conference on Machine Learning, ser. ICML’24. JMLR.org, 2024
2024
-
[17]
Generalized Planning in PDDL Domains with Pretrained Large Language Models,
T. Silver, S. Danet al., “Generalized Planning in PDDL Domains with Pretrained Large Language Models,”Proceedings of the AAAI Conference on Artificial Intelligence, vol. 38, no. 18, pp. 20 256–20 264, 2024
2024
-
[18]
LLM+P: Empowering Large Language Models with Optimal Planning Proficiency
B. Liu, Y . Jianget al., “LLM+P: Empowering Large Language Models with Optimal Planning Proficiency,” 2023, arXiv:2304.11477 [cs.AI]. [Online]. Available: https://arxiv.org/abs/2304.11477
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[19]
SatLM: Satisfiability-Aided Language Models Using Declarative Prompting,
X. Ye, Q. Chenet al., “SatLM: Satisfiability-Aided Language Models Using Declarative Prompting,” inAdvances in Neural Information Processing Systems, A. Oh, T. Naumannet al., Eds., vol. 36. Curran Associates, Inc, 2023
2023
-
[20]
Logic-LM: Empowering Large Language Models with Symbolic Solvers for Faithful Logical Reasoning,
L. Pan, A. Albalaket al., “Logic-LM: Empowering Large Language Models with Symbolic Solvers for Faithful Logical Reasoning,” in Findings of the Association for Computational Linguistics: EMNLP 2023, H. Bouamor, J. Pino, and K. Bali, Eds. Stroudsburg, PA, USA: Association for Computational Linguistics, 2023, pp. 3806–3824
2023
-
[21]
Counterexample Guided Inductive Synthesis Using Large Language Models and Satisfiability Solving,
S. K. Jha, S. Jhaet al., “Counterexample Guided Inductive Synthesis Using Large Language Models and Satisfiability Solving,” inMILCOM 2023 - 2023 IEEE Military Communications Conference (MILCOM). Piscataway, NJ: IEEE, 2023, pp. 944–949
2023
-
[22]
E. Hirsch, G. Uziel, and A. Anaby-Tavor, “What’s the Plan? Evaluating and Developing Planning-Aware Techniques for Language Models,” 2024, arXiv:2402.11489 [cs.CL]. [Online]. Available: https: //arxiv.org/abs/2402.11489
-
[23]
A survey on LLM-based multi-agent systems: workflow, infrastructure, and challenges,
X. Li, S. Wanget al., “A survey on LLM-based multi-agent systems: workflow, infrastructure, and challenges,”Vicinagearth, vol. 1, no. 1, 2024
2024
-
[24]
ReAct: Synergizing Reasoning and Acting in Language Models,
S. Yao, J. Zhaoet al., “ReAct: Synergizing Reasoning and Acting in Language Models,” inInternational Conference on Learning Represen- tations, 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.