Frequency-domain Event-based Imaging for Selective Surveillance
Pith reviewed 2026-05-19 15:38 UTC · model grok-4.3
The pith
Frequency analysis of event data from event-based cameras isolates rotating man-made objects like drone rotors from background clutter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
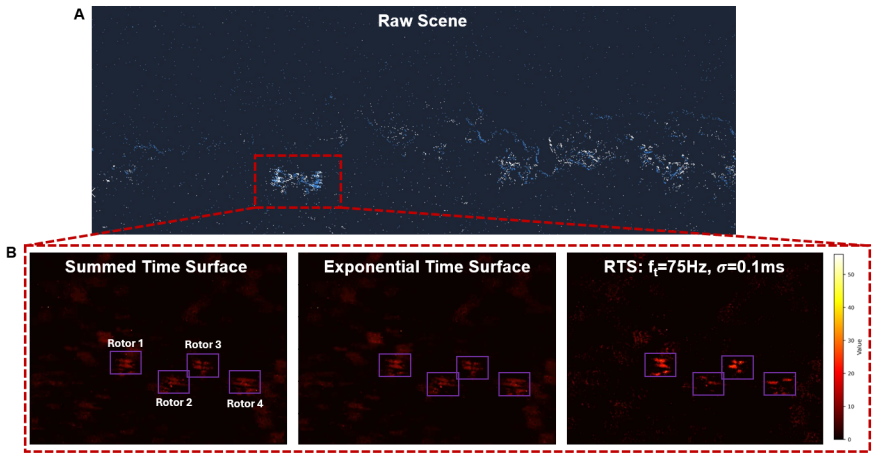
FRIES applies time gating, pixel-wise activity mapping, ROI clustering, and localized spectral analysis to extract dominant frequencies that distinguish structured object signatures from unstructured background and noise; RTS then weights events by phase coherence with those frequencies.
What carries the argument
Localized spectral analysis on aggregated event data within clustered regions of interest, which isolates dominant periodic frequencies from man-made motion such as rotor rotation.
If this is right
- Rotor rotation and mechanical vibrations generate extractable dominant frequencies in event data that enable discrimination of man-made objects.
- Time gating and phase-coherent weighting suppress moving backgrounds while preserving signals from hovering or rotating targets.
- Surveillance pipelines can operate selectively on sparse event streams without converting to or processing full image frames.
- Outdoor scenes with realistic clutter such as treelines still allow frequency-based detection of drones.
- The same frequency extraction serves both indoor controlled tests and outdoor field data.
Where Pith is reading between the lines
- Combining frequency extraction with simple classifiers could turn detected peaks into automatic object labels without additional sensors.
- Updating the dominant frequency over short windows might support tracking of objects whose rotation rate changes during flight.
- The method's emphasis on phase coherence could extend naturally to vibration monitoring in industrial machinery using the same event cameras.
- Lower data rates from selective processing might allow longer operation of battery-powered event cameras in remote surveillance.
Load-bearing premise
Periodic motions from man-made objects produce detectable dominant frequencies in the aggregated event data of each region of interest that can be reliably separated from background and noise.
What would settle it
A recording of a known rotating object where spectral analysis of its clustered event ROI shows no peak at the object's actual rotation frequency or where background events produce false peaks at similar frequencies.
Figures










read the original abstract
Event-based cameras (EBCs) are an attractive sensing modality for surveillance due to their reporting of pixel-level radiance changes with microsecond resolution and high dynamic range, enabling motion extraction while suppressing background. Their asynchronous, sparse output, however, necessitate algorithms that identify targets in event-space without processing full frames. We introduce Frequency Rate Information for Event Space (FRIES), a neuromorphic processing framework that detects periodicity in events, such as rotor rotation and mechanical vibrations, to discriminate and monitor man-made objects. FRIES first applies a time gate to suppress background and noise, then aggregates events into a pixel-wise activity (e.g., density) map and clusters pixels into regions-of-interest (ROIs). A localized spectral analysis is applied to each ROI to extract dominant frequencies used to distinguish structured object signatures from unstructured background and noise. Discriminated targets are visualized using a Resonant Time Surface (RTS), a frequency-selective method that weights events by their phase coherence with the extracted frequencies, rewarding in-sync content and suppressing out-of-sync clutter. We demonstrate FRIES and RTS in a controlled indoor experiment to recover the rotational frequency of a mechanical chopper and drone rotors against a moving background. We further test these methods on an outdoor data to detect a hovering drone against a realistic treeline. These preliminary results establish frequency-domain event processing as a promising front-end for selective surveillance in neuromorphic pipelines and a complementary surveillance modality, leveraging the high temporal resolution to enable spectral discrimination.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Frequency Rate Information for Event Space (FRIES), a neuromorphic framework for event-based cameras that applies time gating, pixel-wise activity mapping, ROI clustering, and localized spectral analysis to extract dominant frequencies from periodic event signatures (e.g., rotor rotation or vibrations) in order to discriminate man-made targets from unstructured background. Discriminated targets are then visualized via a Resonant Time Surface (RTS) that weights events by phase coherence with the extracted frequencies. The approach is demonstrated qualitatively on an indoor chopper/drone experiment against moving background and an outdoor hovering-drone test against a treeline.
Significance. If the frequency-extraction step can be shown to reliably isolate periodic signatures, the method would provide a lightweight, event-native front-end for selective surveillance that exploits the microsecond temporal resolution of event cameras without full-frame processing. This would complement existing event-based motion-extraction pipelines and could be useful in resource-constrained neuromorphic surveillance systems.
major comments (2)
- [Experimental results / demonstrations] The central claim that localized spectral analysis on per-ROI event aggregates produces dominant frequencies capable of separating structured object signatures from background and noise is load-bearing, yet the experimental demonstrations (indoor chopper/drone and outdoor treeline tests) supply only qualitative success statements. No spectrum plots, peak-to-noise ratios, detection/false-positive rates, or baseline comparisons are reported, leaving the separability assumption unverified.
- [Methods / FRIES pipeline description] The pipeline description states that a time gate is applied first, followed by aggregation into an activity map and ROI clustering before spectral analysis. If ROI boundaries mix target and background events or if the temporal binning does not preserve microsecond-scale periodicity, the extracted frequency will not discriminate signatures; the manuscript provides no analysis or sensitivity test of these steps.
minor comments (2)
- [Abstract / Introduction] The expansion of the acronym FRIES is given as 'Frequency Rate Information for Event Space'; it would help readers if the manuscript clarified whether 'Rate' refers to event rate, frequency rate, or another quantity.
- [Methods] Notation for the activity map (e.g., density vs. count) and the exact definition of phase coherence in the RTS weighting step could be made more explicit to aid reproducibility.
Simulated Author's Rebuttal
We are grateful to the referee for their careful reading of the manuscript and for highlighting areas where the presentation and evidence can be strengthened. Below we provide point-by-point responses to the major comments.
read point-by-point responses
-
Referee: [Experimental results / demonstrations] The central claim that localized spectral analysis on per-ROI event aggregates produces dominant frequencies capable of separating structured object signatures from background and noise is load-bearing, yet the experimental demonstrations (indoor chopper/drone and outdoor treeline tests) supply only qualitative success statements. No spectrum plots, peak-to-noise ratios, detection/false-positive rates, or baseline comparisons are reported, leaving the separability assumption unverified.
Authors: We concur that the experimental section relies on qualitative demonstrations, which leaves the quantitative separability of the frequency signatures less substantiated. As the abstract notes, these are preliminary results. In the revised manuscript, we will augment the results section with spectrum plots from the ROI spectral analyses, quantitative measures such as peak-to-background ratios, and a basic performance comparison against a standard event-based clustering approach without frequency analysis. This will provide the necessary verification for the load-bearing claim. revision: yes
-
Referee: [Methods / FRIES pipeline description] The pipeline description states that a time gate is applied first, followed by aggregation into an activity map and ROI clustering before spectral analysis. If ROI boundaries mix target and background events or if the temporal binning does not preserve microsecond-scale periodicity, the extracted frequency will not discriminate signatures; the manuscript provides no analysis or sensitivity test of these steps.
Authors: We appreciate the referee pointing out the potential vulnerabilities in the pipeline steps. The manuscript describes the time gate as a means to suppress background events and the activity map for identifying regions with sufficient event density before clustering. Nevertheless, we agree that an explicit sensitivity test is absent. We will incorporate in the methods a sensitivity study examining how changes in the time gate duration and clustering parameters affect the extracted dominant frequencies and the resulting RTS visualization, using data from the indoor and outdoor experiments. revision: yes
Circularity Check
No significant circularity; pipeline is a sequence of standard signal-processing operations
full rationale
The paper describes FRIES as a sequence of established techniques—time gating to suppress background, pixel-wise activity mapping, ROI clustering, localized spectral analysis for dominant frequencies, and RTS weighting by phase coherence—applied to event streams from event-based cameras. No mathematical derivations, fitted parameters, or predictions are presented that reduce to the same inputs by construction. The method relies on external signal-processing concepts without self-definitional loops, self-citation load-bearing premises, or renaming of known results as novel derivations. The experimental demonstrations serve as validation rather than circular justification, rendering the overall approach self-contained against standard benchmarks in neuromorphic vision.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Situational Awareness: Techniques, Challenges, and Prospects,
Munir, A., Aved, A., and Blasch, E., “Situational Awareness: Techniques, Challenges, and Prospects,”AI3, 55–77 (Jan. 2022)
work page 2022
-
[2]
Gallego, G., Delbr¨ uck, T., Orchard, G., Bartolozzi, C., Taba, B., Censi, A., Leutenegger, S., Davison, A. J., Conradt, J., Daniilidis, K., and Scaramuzza, D., “Event-Based Vision: A Survey,”IEEE Transactions on Pattern Analysis and Machine Intelligence44, 154–180 (Jan. 2022)
work page 2022
-
[3]
Learning Event-Based Motion Deblurring,
Jiang, Z., Zhang, Y., Zou, D., Ren, J., Lv, J., and Liu, Y., “Learning Event-Based Motion Deblurring,” 3320–3329 (2020)
work page 2020
-
[4]
Event-Based Vision Meets Deep Learning on Steering Prediction for Self-Driving Cars,
Maqueda, A. I., Loquercio, A., Gallego, G., Garc´ ıa, N., and Scaramuzza, D., “Event-Based Vision Meets Deep Learning on Steering Prediction for Self-Driving Cars,” 5419–5427 (2018)
work page 2018
-
[5]
Turbulence mitigation in imagery including moving objects from a static event camera,
Boehrer, N., Nieuwenhuizen, R. P. J., and Dijk, J., “Turbulence mitigation in imagery including moving objects from a static event camera,”Optical Engineering60, 053101 (May 2021)
work page 2021
-
[6]
EventLFM: event camera integrated Fourier light field microscopy for ultrafast 3D imaging,
Guo, R., Yang, Q., Chang, A. S., Hu, G., Greene, J., Gabel, C. V., You, S., and Tian, L., “EventLFM: event camera integrated Fourier light field microscopy for ultrafast 3D imaging,”Light: Science & Applications13, 144 (June 2024)
work page 2024
-
[7]
E-Gaze: Gaze Estimation With Event Camera,
Li, N., Chang, M., and Raychowdhury, A., “E-Gaze: Gaze Estimation With Event Camera,”IEEE Trans- actions on Pattern Analysis and Machine Intelligence46, 4796–4811 (July 2024)
work page 2024
-
[8]
Seeing Motion at Nighttime with an Event Camera,
Liu, H., Peng, S., Zhu, L., Chang, Y., Zhou, H., and Yan, L., “Seeing Motion at Nighttime with an Event Camera,” 25648–25658 (2024)
work page 2024
-
[9]
Event-based Sensing for Space Situational Awareness,
Cohen, G., Afshar, S., Morreale, B., Bessell, T., Wabnitz, A., Rutten, M., and van Schaik, A., “Event-based Sensing for Space Situational Awareness,”The Journal of the Astronautical Sciences66, 125–141 (June 2019)
work page 2019
-
[10]
Chen, G., Liu, P., Liu, Z., Tang, H., Hong, L., and Dong, J., “NeuroAED: Towards Efficient Abnormal Event Detection in Visual Surveillance With Neuromorphic Vision Sensor,”IEEE Transactions on Information Forensics and Security16(2020)
work page 2020
-
[11]
Drone Detection with Event Cam- eras,
Magrini, G., Berlincioni, L., Becattini, F., Cultrera, L., and Pala, P., “Drone Detection with Event Cam- eras,” 4703–4714 (2025)
work page 2025
-
[12]
Low Latency Blast Detection Using Event Cameras,
Parab, S. and Willis, A., “Low Latency Blast Detection Using Event Cameras,” in [SoutheastCon 2025], 1097–1102 (Mar. 2025). ISSN: 1558-058X
work page 2025
-
[13]
Events-To-Video: Bringing Modern Computer Vision to Event Cameras,
Rebecq, H., Ranftl, R., Koltun, V., and Scaramuzza, D., “Events-To-Video: Bringing Modern Computer Vision to Event Cameras,” 3857–3866 (2019)
work page 2019
-
[14]
Neuromorphic vision: From sensors to event- based algorithms,
Lakshmi, A., Chakraborty, A., and Thakur, C. S., “Neuromorphic vision: From sensors to event- based algorithms,”WIREs Data Mining and Knowledge Discovery9(4), e1310 (2019). eprint: https://wires.onlinelibrary.wiley.com/doi/pdf/10.1002/widm.1310
-
[15]
HATS: Histograms of Averaged Time Surfaces for Robust Event-Based Object Classification,
Sironi, A., Brambilla, M., Bourdis, N., Lagorce, X., and Benosman, R., “HATS: Histograms of Averaged Time Surfaces for Robust Event-Based Object Classification,” 1731–1740 (2018)
work page 2018
-
[16]
Object Detection with Spiking Neural Networks on Automo- tive Event Data,
Cordone, L., Miramond, B., and Thierion, P., “Object Detection with Spiking Neural Networks on Automo- tive Event Data,” in [2022 International Joint Conference on Neural Networks (IJCNN)], 1–8 (July 2022). ISSN: 2161-4407
work page 2022
-
[17]
Multirotor Drone Noise at Static Thrust,
Tinney, C. E. and Sirohi, J., “Multirotor Drone Noise at Static Thrust,”AIAA Journal56(7), 2816–2826 (2018). eprint: https://doi.org/10.2514/1.J056827
-
[18]
A PyTorch-enabled tool for synthetic event camera data generation and algorithm development,
Greene, J. L., Kar, A., Galindo, I., Quiles, E., Chen, E., and Anderson, M., “A PyTorch-enabled tool for synthetic event camera data generation and algorithm development,” in [Synthetic Data for Artificial Intelligence and Machine Learning: Tools, Techniques, and Applications III],13459, 123–143, SPIE (May 2025)
work page 2025
-
[19]
Paredes-Valles, F. and de Croon, G. C. H. E., “Back to Event Basics: Self-Supervised Learning of Image Reconstruction for Event Cameras via Photometric Constancy,” 3446–3455 (2021)
work page 2021
-
[20]
How To Calibrate Your Event Camera,
Muglikar, M., Gehrig, M., Gehrig, D., and Scaramuzza, D., “How To Calibrate Your Event Camera,” 1403–1409 (2021)
work page 2021
-
[21]
Sengupta, J. P., Villemur, M., and Andreou, A. G., “Efficient, event-driven feature extraction and unsuper- vised object tracking for embedded applications,” in [2021 55th Annual Conference on Information Sciences and Systems (CISS)], 1–6 (2021)
work page 2021
-
[22]
DBSCAN: Past, present and future,
Khan, K., Rehman, S. U., Aziz, K., Fong, S., and Sarasvady, S., “DBSCAN: Past, present and future,” in [The Fifth International Conference on the Applications of Digital Information and Web Technologies (ICADIWT 2014)], 232–238 (Feb. 2014)
work page 2014
-
[23]
Pixel Latency Measurements of Event Cameras,
Chassagnol, R. V., Blattner, T. J., Litorja, M., and Bajcsy, P., “Pixel Latency Measurements of Event Cameras,”IEEE Transactions on Instrumentation and Measurement74, 1–12 (2025)
work page 2025
-
[24]
Robinson, N. I., “Renewal functions as series,”Communications in Statistics. Stochastic Models13, 577–604 (Jan. 1997). eprint: https://doi.org/10.1080/15326349708807440
-
[25]
Trajectory generation and control for precise aggressive ma- neuvers with quadrotors,
Mellinger, D., Michael, N., and Kumar, V., “Trajectory generation and control for precise aggressive ma- neuvers with quadrotors,”International Journal of Robotic Research - IJRR31(04 2012)
work page 2012
-
[26]
Low-latency automotive vision with event cameras,
Gehrig, D. and Scaramuzza, D., “Low-latency automotive vision with event cameras,”Nature629, 1034– 1040 (May 2024)
work page 2024
-
[27]
Bonami, A., Soria, F., and Weiss, G., “Band-limited wavelets,”The Journal of Geometric Analysis3, 543–578 (Nov. 1993)
work page 1993
-
[28]
Neuromorphic Drone Detection: An Event-RGB Multimodal Approach,
Magrini, G., Becattini, F., Pala, P., Del Bimbo, A., and Porta, A., “Neuromorphic Drone Detection: An Event-RGB Multimodal Approach,” in [Computer Vision – ECCV 2024 Workshops], Del Bue, A., Canton, C., Pont-Tuset, J., and Tommasi, T., eds., 259–275, Springer Nature Switzerland, Cham (2025)
work page 2024
-
[29]
Jacobsen, E. and Lyons, R., “The sliding DFT,”IEEE Signal Processing Magazine20, 74–80 (Mar. 2003)
work page 2003
-
[30]
FRED: The Florence RGB-Event Drone Dataset,
Magrini, G., Marini, N., Becattini, F., Berlincioni, L., Biondi, N., Pala, P., and Bimbo, A. D., “FRED: The Florence RGB-Event Drone Dataset,” (June 2025). arXiv:2506.05163 [cs]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.