RadioDiff-Inv2: Differentiable Diffusion Inversion under Location Drift from Sparse Noisy Measurements for Radio Map Estimation
Pith reviewed 2026-06-27 18:08 UTC · model grok-4.3
The pith
RadioDiff-Inv2 reconstructs radio maps from sparse noisy RSS data under location drift by backpropagating through a differentiable diffusion process to enforce a drift-marginalized fidelity term.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
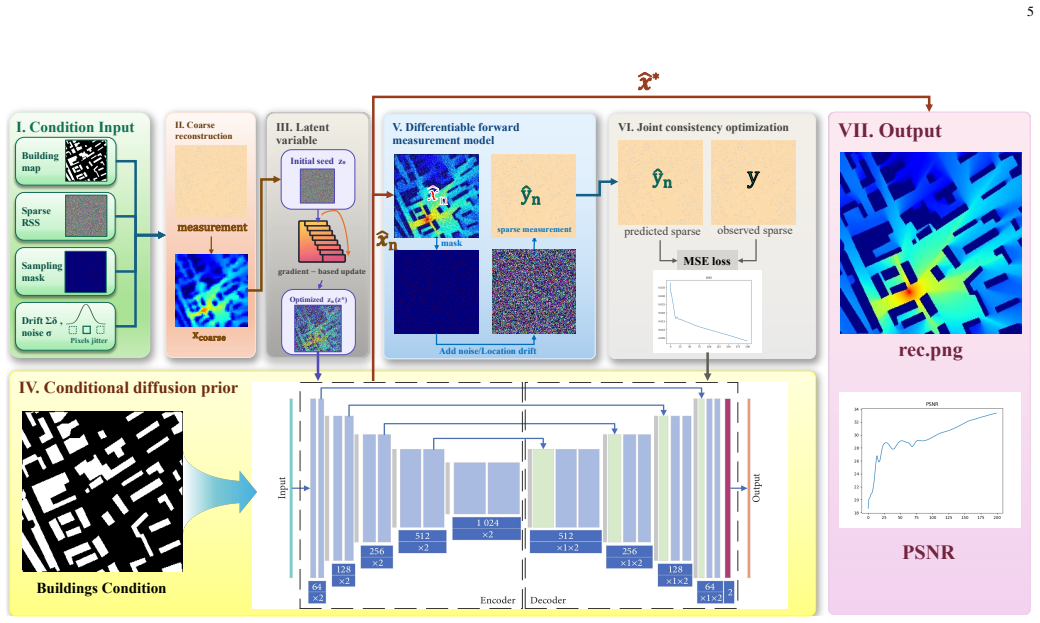
RadioDiff-Inv2 constructs a differentiable, drift-aware measurement operator through Gaussian resampling on grid-based maps, then exploits the probability-flow ODE to treat the diffusion sampler as a deterministic mapping from initial noise to estimated radio map; optimizing the noise code by backpropagation against the drift-marginalized fidelity objective yields reconstructions that remain prior-plausible while satisfying the perturbed measurements.
What carries the argument
Differentiable diffusion inversion that optimizes an initial noise code through the probability-flow ODE against a drift-marginalized data-fidelity objective built with Gaussian resampling.
If this is right
- Reconstruction PSNR remains nearly constant as SNR drops while conventional estimators degrade sharply.
- The same optimization procedure works across wide ranges of measurement sparsity and drift magnitude without retuning.
- No posterior sampling is required, so reconstruction cost stays comparable to a single forward pass plus gradient steps.
- The learned prior supplies plausible structure where measurements are absent, yet the fidelity term still anchors the solution to the drifted observations.
Where Pith is reading between the lines
- The same noise-code optimization could be applied to other inverse problems whose sensing operator is uncertain, such as tomographic reconstruction with patient motion.
- If the diffusion model is retrained on maps that explicitly include drift statistics, the fidelity term might further reduce residual inconsistencies.
- The framework suggests a general route for turning any pretrained diffusion model into a solver for linear inverse problems whose forward operator can be made differentiable.
Load-bearing premise
The diffusion prior trained on the authors' dataset continues to describe real radio maps after the Gaussian resampling operator is applied to account for location drift.
What would settle it
On a held-out set of real radio maps collected with independently measured location drift, if RadioDiff-Inv2 PSNR falls below the best non-diffusion baseline at any sparsity or SNR level, the claim that the method reliably produces both prior-plausible and measurement-consistent maps would be refuted.
Figures
read the original abstract
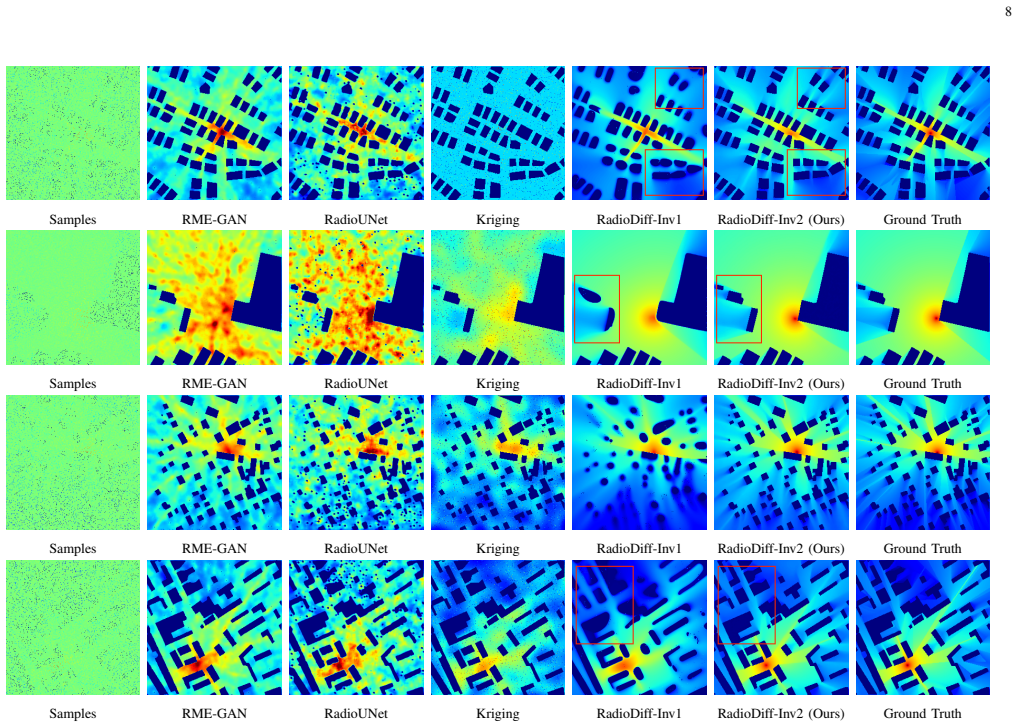
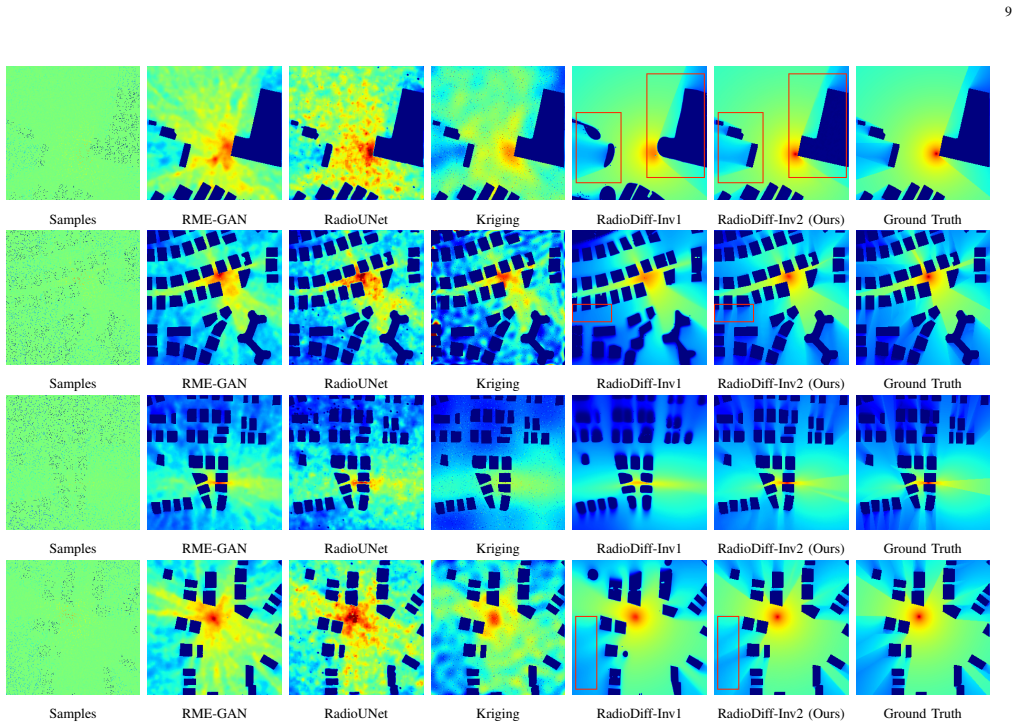
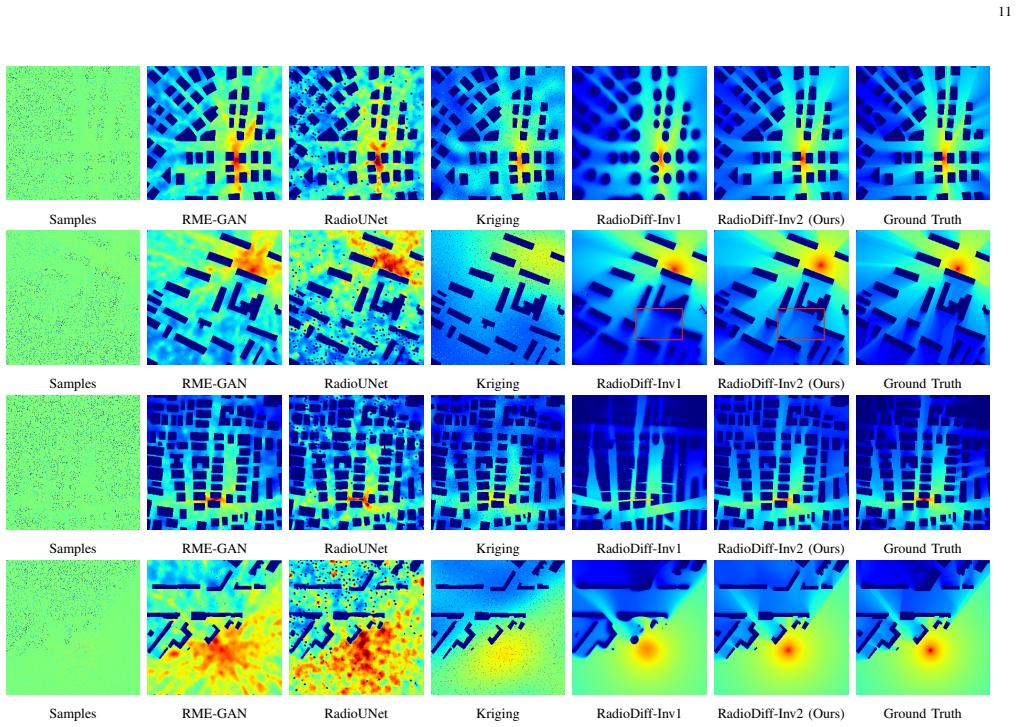
Radio map (RM) estimation is a key enabler for environment-aware optimization in 6G wireless networks. In practice, RM construction increasingly relies on crowdsourced received signal strength (RSS) feedback that is inherently sparse and noisy. A further and often overlooked challenge is location drift, whereby privacy constraints and user mobility cause reported sampling coordinates to deviate from the true measurement locations. Unlike additive measurement noise, location drift perturbs the sensing operator itself, since each RSS sample effectively queries the underlying RM at an incorrect spatial coordinate. This operator uncertainty, compounded with sparse noisy sensing, renders the inverse problem severely ill-posed and limits conventional estimators that rely on analytically specified priors. This paper proposes RadioDiff-Inv2, a differentiable diffusion inversion framework that estimates RMs from sparse noisy measurements under location drift. A Gaussian resampling scheme is introduced to construct a differentiable, drift-aware measurement operator on grid-based maps, and the probability-flow ordinary differential equation (ODE) is exploited to cast the diffusion sampler as a deterministic, differentiable mapping from an initial noise code to the estimated RM. By optimizing the noise code via backpropagation against a drift-marginalized data-fidelity objective, RadioDiff-Inv2 produces reconstructions that are both prior-plausible and measurement-consistent without costly posterior sampling. Extensive experiments show that RadioDiff-Inv2 outperforms the best competing baseline by 4 to 14 dB in PSNR across varying sparsity and drift levels. The advantage is most pronounced in low-SNR regimes, where the learned diffusion prior maintains near-constant reconstruction fidelity while conventional methods degrade severely.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes RadioDiff-Inv2, a differentiable diffusion inversion method for estimating radio maps (RMs) from sparse noisy RSS measurements under location drift. It introduces a Gaussian resampling scheme to create a differentiable drift-aware sensing operator on grid maps and casts the probability-flow ODE sampler as a deterministic differentiable map from noise code to RM estimate. The noise code is optimized via back-propagation on a drift-marginalized data-fidelity objective, yielding reconstructions claimed to be both prior-plausible and measurement-consistent. Experiments report 4–14 dB PSNR gains over baselines, most pronounced at low SNR.
Significance. If the central claims hold after verification, the work would be significant for 6G environment-aware optimization by addressing a practically important inverse problem (crowdsourced RM construction with operator uncertainty). The differentiable diffusion inversion without posterior sampling is a technically interesting direction. However, the reported gains rest on unverified experimental choices (training data, resampling width, dataset) whose soundness is not established in the provided description, limiting immediate assessment of impact.
major comments (2)
- [Method description (training vs. inference)] The diffusion prior is trained only on clean simulated radio maps; the Gaussian resampling operator that marginalizes location drift appears only inside the data-fidelity term at inference time. Because the score function is never exposed to the distribution of drifted measurements, it is unclear that the optimized noise code produces maps whose values at the unknown true locations remain consistent with the observed RSS values once drift is accounted for. This assumption is load-bearing for the measurement-consistency claim and the reported PSNR advantage.
- [Experiments] No ablation is reported on the Gaussian kernel width (the sole free parameter listed for drift handling), nor are error bars, dataset statistics, or simulation parameters for the radio maps provided. Without these, the 4–14 dB gains cannot be assessed for sensitivity to the resampling operator or statistical reliability.
minor comments (2)
- [Method] Derivation details for the differentiable Gaussian resampling operator and its integration with the probability-flow ODE are absent.
- [Experiments] The abstract and experiments section should explicitly state the training dataset size, generation process, and whether any drift augmentation was used.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below, offering clarifications on the method and committing to experimental enhancements where needed.
read point-by-point responses
-
Referee: [Method description (training vs. inference)] The diffusion prior is trained only on clean simulated radio maps; the Gaussian resampling operator that marginalizes location drift appears only inside the data-fidelity term at inference time. Because the score function is never exposed to the distribution of drifted measurements, it is unclear that the optimized noise code produces maps whose values at the unknown true locations remain consistent with the observed RSS values once drift is accounted for. This assumption is load-bearing for the measurement-consistency claim and the reported PSNR advantage.
Authors: The diffusion prior is trained exclusively on clean radio maps to capture the distribution of plausible RMs, following standard practice for learned priors in inverse problems. The Gaussian resampling operator is introduced only at inference to construct the differentiable, drift-marginalized sensing model within the data-fidelity objective. Optimization of the noise code then proceeds via back-propagation through the probability-flow ODE, which acts as a deterministic decoder. This ensures the estimated RM is both prior-plausible (via the implicit effect of the diffusion model) and measurement-consistent under the drifted operator. The score function need not be trained on drifted measurements because consistency is enforced explicitly by the fidelity term rather than through the prior. We will add a dedicated paragraph in the revised manuscript clarifying this separation of concerns and its implications for measurement consistency. revision: partial
-
Referee: [Experiments] No ablation is reported on the Gaussian kernel width (the sole free parameter listed for drift handling), nor are error bars, dataset statistics, or simulation parameters for the radio maps provided. Without these, the 4–14 dB gains cannot be assessed for sensitivity to the resampling operator or statistical reliability.
Authors: We agree that the experimental evaluation would be strengthened by these additions. In the revised manuscript we will report an ablation study on the Gaussian kernel width, include error bars or standard deviations computed over multiple independent runs, provide summary statistics for the training and evaluation datasets, and detail all simulation parameters used to generate the radio maps and noisy measurements. revision: yes
Circularity Check
No significant circularity; derivation chain remains self-contained
full rationale
The paper trains a diffusion prior externally on simulated radio maps and then performs test-time optimization of the noise code against a drift-marginalized fidelity term. Reported PSNR gains are measured on separate test instances; no equation reduces the reconstruction or the performance metric to a quantity fitted on the same data by construction. No self-citation is invoked as a uniqueness theorem or load-bearing premise, and the Gaussian resampling operator is introduced as a new differentiable construct rather than renamed from prior results. The central claim therefore does not collapse to its own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- Gaussian kernel width for drift
axioms (1)
- domain assumption Radio maps can be faithfully represented by the probability-flow ODE trajectory of a diffusion model trained on representative data.
Reference graph
Works this paper leans on
-
[1]
A tutorial on extremely large-scale MIMO for 6G: Fundamentals, signal processing, and applications,
Z. Wang, J. Zhang, H. Du, D. Niyato, S. Cui, B. Ai, M. Debbah, K. B. Letaief, and H. V . Poor, “A tutorial on extremely large-scale MIMO for 6G: Fundamentals, signal processing, and applications,”IEEE Commun. Surveys Tuts., vol. 26, no. 3, pp. 1560–1605, 2024
2024
-
[2]
6G omni-scenario on-demand services provisioning: vision, technology and prospect(in chinese),
N. Cheng, F. Chen, W. Chen, Z. Cheng, Q. Yang, C. Li, and X. Shen, “6G omni-scenario on-demand services provisioning: vision, technology and prospect(in chinese),”Sci Sin Inform, vol. 54, pp. 1025–1054,, 2024
2024
-
[3]
Toward immersive communications in 6G,
X. Shen, J. Gao, M. Li, C. Zhou, S. Hu, M. He, and W. Zhuang, “Toward immersive communications in 6G,”Frontiers Comput. Science, vol. 4, p. 1068478, 2023
2023
-
[4]
Radio map-based 3d path planning for cellular- connected uav,
S. Zhang and R. Zhang, “Radio map-based 3d path planning for cellular- connected uav,”IEEE Trans. Wireless Commun., vol. 20, no. 3, pp. 1975–1989, 2020
1975
-
[5]
Radiodiff-inverse: Diffusion enhanced bayesian inverse estimation for isac radio map construction,
X. Wang, Z. Fang, N. Cheng, R. Sun, Z. Liet al., “Radiodiff-inverse: Diffusion enhanced bayesian inverse estimation for isac radio map construction,”Arxiv Preprint Arxiv:2504.14298, 2025
-
[6]
Analysis of mobile radio access network using the self-organizing map,
K. Raivio, O. Simula, J. Laiho, and P. Lehtimaki, “Analysis of mobile radio access network using the self-organizing map,” inIFIP/IEEE Eighth International Symposium on Integrated Network Management, 2003.IEEE, 2003, pp. 439–451
2003
-
[7]
Toward environment-aware 6G communications via channel knowledge map,
Y . Zeng and X. Xu, “Toward environment-aware 6G communications via channel knowledge map,”Ieee Wireless Commun., vol. 28, no. 3, pp. 84–91, 2021
2021
-
[8]
The sampling-assisted pathloss radio map prediction competition,
C ¸. Yapar, S. Bakirtzis, A. Lutu, I. Wassell, J. Zhang, and G. Caire, “The sampling-assisted pathloss radio map prediction competition,” in 2025 IEEE 35th International Workshop on Machine Learning for Signal Processing (MLSP). IEEE, 2025, pp. 1–6
2025
-
[9]
Rmapcs: Radio map construction from crowdsourced samples for indoor localization,
Y . Ye and B. Wang, “Rmapcs: Radio map construction from crowdsourced samples for indoor localization,”Ieee Access, vol. 6, pp. 24 224–24 238, 2018
2018
-
[10]
RadioDiff: An effective generative diffusion model for sampling- free dynamic radio map construction,
X. Wang, K. Tao, N. Cheng, Z. Yin, Z. Li, Y . Zhang, and X. Shen, “RadioDiff: An effective generative diffusion model for sampling- free dynamic radio map construction,”Ieee Trans. Cognit. Commun. Networking, Early Access, pp. 1–13, 2024
2024
-
[11]
Freeloc: Calibration-free crowdsourced indoor localization,
S. Yang, P. Dessai, M. Verma, and M. Gerla, “Freeloc: Calibration-free crowdsourced indoor localization,” in2013 Proceedings IEEE INFOCOM. IEEE, 2013, pp. 2481–2489
2013
-
[12]
Location using los range estimation in nlos environments,
S. Venkatraman, J. Caffery, and H.-R. You, “Location using los range estimation in nlos environments,” inV ehicular Technology Conference. IEEE 55th V ehicular Technology Conference. VTC Spring 2002 (Cat. No. 02CH37367), vol. 2. IEEE, 2002, pp. 856–860
2002
-
[13]
Mobile location estimator with nlos mitigation using kalman filtering,
B. L. Le, K. Ahmed, and H. Tsuji, “Mobile location estimator with nlos mitigation using kalman filtering,” in2003 IEEE Wireless Communica- tions and Networking, 2003. WCNC 2003., vol. 3. IEEE, 2003, pp. 1969–1973
2003
-
[14]
Improving diffusion models for inverse problems using manifold constraints,
H. Chung, B. Sim, D. Ryu, and J. C. Ye, “Improving diffusion models for inverse problems using manifold constraints,”Advances Neural Inf. Process. Syst., vol. 35, pp. 25 683–25 696, 2022
2022
-
[15]
Ray techniques in electromagnetics,
G. A. Deschamps, “Ray techniques in electromagnetics,”Proc. IEEE, vol. 60, no. 9, pp. 1022–1035, 1972
1972
-
[16]
Location errors in wireless embedded sensor networks: sources, models, and effects on applications,
S. Slijepcevic, S. Megerian, and M. Potkonjak, “Location errors in wireless embedded sensor networks: sources, models, and effects on applications,”Acm Sigmobile Mobile Comput. Commun. Review, vol. 6, no. 3, pp. 67–78, 2002
2002
-
[17]
Kriging-based interference power constraint: Integrated design of the radio environment map and transmission power,
K. Sato and T. Fujii, “Kriging-based interference power constraint: Integrated design of the radio environment map and transmission power,” IEEE Trans. Cogn. Commun. Netw., vol. 3, no. 1, pp. 13–25, 2017
2017
-
[18]
Radiodiff-k2: Helmholtz equation informed generative diffusion model for multi-path aware radio map construction,
X. Wang, Q. Zhang, N. Cheng, R. Sun, Z. Li, S. Cui, and X. Shen, “Radiodiff-k2: Helmholtz equation informed generative diffusion model for multi-path aware radio map construction,”IEEE J. Sel. Areas Commun., vol. 44, pp. 2318–2333, 2026
2026
-
[19]
Radiodiff-3d: A 3d× 3d radio map dataset and generative diffusion based benchmark for 6g environment-aware communication,
X. Wang, Q. Zhang, N. Cheng, J. Chen, Z. Zhang, Z. Li, S. Cui, and X. Shen, “Radiodiff-3d: A 3d× 3d radio map dataset and generative diffusion based benchmark for 6g environment-aware communication,” IEEE Trans. Netw. Sci. Eng., vol. 13, pp. 3773–3789, 2026
2026
-
[20]
Theoretical analysis of the radio map estimation problem,
D. Romero, T. N. Ha, R. Shrestha, and M. Franceschetti, “Theoretical analysis of the radio map estimation problem,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 13 722–13 737, 2024
2024
-
[21]
Parallel diffusion models of operator and image for blind inverse problems,
H. Chung, J. Kim, S. Kim, and J. C. Ye, “Parallel diffusion models of operator and image for blind inverse problems,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2023, pp. 6059–6069
2023
-
[22]
Radiodiff-flux: Efficient radio map construction via generative denoise diffusion model trajectory midpoint reuse,
X. Wang, P. Zheng, H. Jia, N. Cheng, R. Sun, C. Zhou, and X. Shen, “Radiodiff-flux: Efficient radio map construction via generative denoise diffusion model trajectory midpoint reuse,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 4882–4895, 2026
2026
-
[23]
X. Wang, Q. Zhang, and N. Cheng, “Radiodiff-loc: Diffusion model enhanced scattering congnition for nlos localization with sparse radio map estimation,”Arxiv Preprint Arxiv:2509.01875, 2025. 13
-
[24]
The probability flow ode is provably fast,
S. Chen, S. Chewi, H. Lee, Y . Li, J. Lu, and A. Salim, “The probability flow ode is provably fast,”Advances Neural Inf. Process. Syst., vol. 36, pp. 68 552–68 575, 2023
2023
-
[25]
Denoising diffusion probabilistic models,
J. Ho, A. Jain, and P. Abbeel, “Denoising diffusion probabilistic models,” Advances Neural Inf. Process. Syst., vol. 33, pp. 6840–6851, 2020
2020
-
[26]
Denoising diffusion implicit models,
J. Song, C. Meng, and S. Ermon, “Denoising diffusion implicit models,” inProceedings of the 2020 International Conference on Learning Representations (ICLR), 2020, pp. 1–12
2020
-
[27]
A Tutorial on Learning-Based Radio Map Construction: Data, Paradigms, and Physics-Awareness
X. Wang, Y . Pan, and N. Cheng, “A tutorial on learning-based radio map construction: Data, paradigms, and physics-awarenes,”arXiv preprint arXiv:2603.17499, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[28]
K-nearest neighbors gaussian process regression for urban radio map reconstruction,
Y . Zhang and S. Wang, “K-nearest neighbors gaussian process regression for urban radio map reconstruction,”IEEE Commun. Lett., vol. 26, no. 12, pp. 3049–3053, 2022
2022
-
[29]
Deeprem: Deep-learning- based radio environment map estimation from sparse measurements,
A. Chaves-Villota and C. A. Viteri-Mera, “Deeprem: Deep-learning- based radio environment map estimation from sparse measurements,” Ieee Access, vol. 11, pp. 48 697–48 714, 2023
2023
-
[30]
RadioUNet: Fast radio map estimation with convolutional neural networks,
R. Levie, C ¸. Yapar, G. Kutyniok, and G. Caire, “RadioUNet: Fast radio map estimation with convolutional neural networks,”IEEE Trans. Wireless Commun., vol. 20, no. 6, pp. 4001–4015, 2021
2021
-
[31]
Tire-gan: Task- incentivized generative learning for radiomap estimation,
Y . Zhou, A. Wijesinghe, Y . Ma, S. Zhang, and Z. Ding, “Tire-gan: Task- incentivized generative learning for radiomap estimation,”IEEE Wireless Commun. Lett., 2025
2025
-
[32]
RME-GAN: A learning framework for radio map estimation based on conditional generative adversarial network,
S. Zhang, A. Wijesinghe, and Z. Ding, “RME-GAN: A learning framework for radio map estimation based on conditional generative adversarial network,”IEEE Internet Things J., vol. 10, no. 20, pp. 18 016– 18 027, 2023
2023
-
[33]
Rmtransformer: Accurate radio map construction and coverage prediction,
Y . Li, C. Zhang, W. Wang, and Y . Huang, “Rmtransformer: Accurate radio map construction and coverage prediction,” in2025 IEEE 101st V ehicular Technology Conference (VTC2025-Spring). IEEE, 2025, pp. 1–5
2025
-
[34]
Mars: Radio map super- resolution and reconstruction method under sparse channel measurements,
C. Deng, N. Liu, W. Xie, L. Xu, and L. Wang, “Mars: Radio map super- resolution and reconstruction method under sparse channel measurements,” Arxiv Preprint Arxiv:2506.04682, 2025
-
[35]
Z. Fang, K. Liu, K. Chen, Q. Liu, J. Zhang, L. Song, and Y . Wang, “Ra- dioformer: A multiple-granularity radio map estimation transformer with 1\textpertenthousand spatial sampling,”Arxiv Preprint Arxiv:2504.19161, 2025
-
[36]
Radiogat: A joint model-based and data-driven framework for multi-band radiomap reconstruction via graph attention networks,
X. Li, S. Zhang, H. Li, X. Li, L. Xu, H. Xu, H. Mei, G. Zhu, N. Qi, and M. Xiao, “Radiogat: A joint model-based and data-driven framework for multi-band radiomap reconstruction via graph attention networks,”IEEE Trans. Wireless Commun., vol. 23, no. 11, pp. 17 777–17 792, 2024
2024
-
[37]
Physics-informed representation alignment for sparse radio-map reconstruction,
H. Jia, W. Chen, Z. Huang, L. Wang, H. Xiao, N. Jia, K. Wu, S. Lai, B. Tian, and Y . Yue, “Physics-informed representation alignment for sparse radio-map reconstruction,” inProceedings of the 33rd ACM International Conference on Multimedia, 2025, pp. 12 352–12 360
2025
-
[38]
iradiodiff: Physics-informed diffusion model for indoor radio map construction and localization,
X. Wang, T. Yuan, Y . Cao, N. Cheng, R. Sun, and W. Zhuang, “iradiodiff: Physics-informed diffusion model for indoor radio map construction and localization,”Arxiv Preprint Arxiv:2511.20015, 2025
-
[39]
Radioflow: Efficient radio map construction framework with flow matching,
H. Jia, W. Chen, X. Wang, N. Cheng, H. Zhang, K. Yu, S. Lai, N. Jia, B. Tian, H. Xiaoet al., “Radioflow: Efficient radio map construction framework with flow matching,”Arxiv Preprint Arxiv:2510.09314, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.