Spatial dynamics of flexible nano-swimmers under a rotating magnetic field
Pith reviewed 2026-05-19 11:11 UTC · model grok-4.3
The pith
A two-link elastic model of magnetic nano-swimmers admits explicit analytic solutions for both low-frequency tumbling and higher-frequency helical swimming.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For a two-link rigid-rod swimmer with a linear torsional spring at the hinge, the equations of motion under a uniformly rotating magnetic field possess explicit analytic synchronous solutions: one describing steady in-plane tumbling at low frequencies and another describing steady spatial helical swimming at higher frequencies, each accompanied by a local stability analysis that locates the frequency intervals in which the solution remains stable.
What carries the argument
The reduced time-invariant dynamical system obtained by transforming the original nonlinear equations into a frame that rotates with the magnetic field.
If this is right
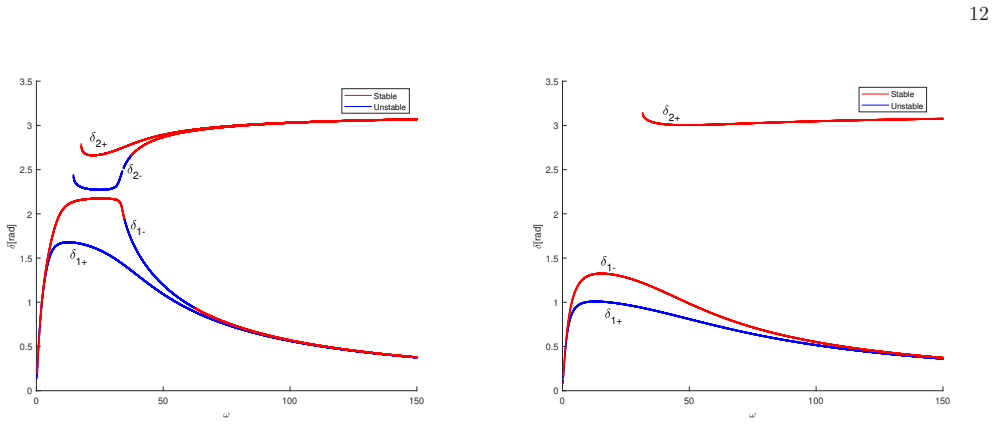
- Stable helical swimming occurs only inside a distinct frequency window bounded by bifurcation points.
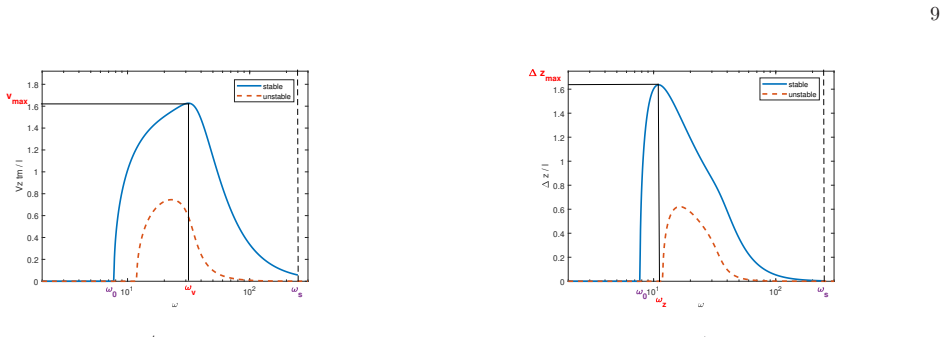
- Swimming speed can be increased by tuning the magnetic-field strength and the hinge stiffness within the stable helical branch.
- Asynchronous motion appears once the driving frequency exceeds the upper stability limit of the helical solution.
- The same reduced equations predict how small changes in rod length or magnetic moment shift the location of the stability boundaries.
Where Pith is reading between the lines
- The explicit solutions make it straightforward to test whether adding a third link would enlarge the frequency interval of stable forward motion.
- Because the model is parameter-light, the predicted speed-versus-frequency curves can be compared directly with existing experimental data on similar two-rod swimmers.
- The bifurcation structure suggests that brief frequency sweeps could be used to steer the swimmer between tumbling and helical states in confined biological environments.
Load-bearing premise
The hinge torque remains linear in the bending angle and the two rods stay rigid, so that full three-dimensional fluid-structure interaction is not required to capture the synchronous regimes.
What would settle it
Measurement of the exact frequency at which a physical two-rod nano-swimmer changes from in-plane tumbling to forward helical motion and comparison with the analytic stability thresholds predicted by the model.
Figures














read the original abstract
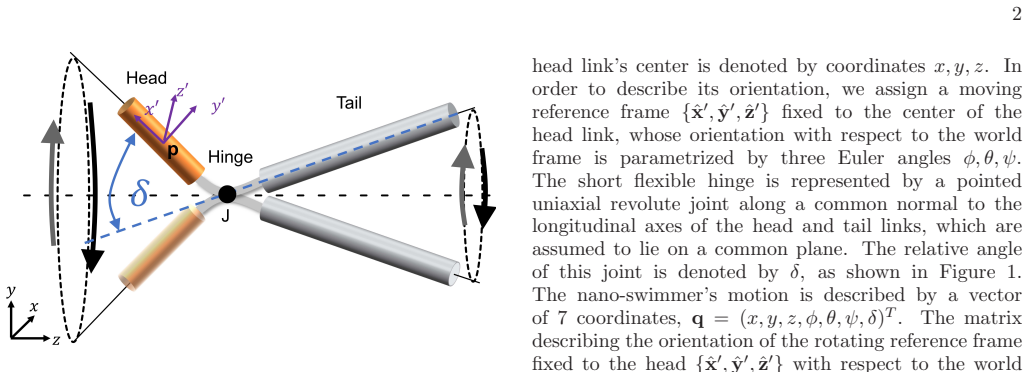
Micro-nano-robotic swimmers have promising potential for future biomedical tasks such as targeted drug delivery and minimally-invasive diagnosis. An efficient method for controlled actuation of such nano-swimmers is applying a rotating external magnetic field, resulting in helical corkscrew-like locomotion. In previous joint work, we presented fabrication and actuation of a simple magnetic nano-swimmer composed of two nano-rods connected by a short elastic hinge. Experiments under different actuation frequencies result in different motion regimes. At low frequencies, in-plane tumbling; at higher frequencies, moving forward in a spatial helical path in synchrony with the rotating magnetic field; in further frequency increase, asynchronous swimming is obtained. In this work, we present mathematical analysis of this nano-swimmer motion. We consider a simple two-link model and explicitly formulate and analyze its nonlinear dynamic equations, and reduce them to a simpler time-invariant system. For the first time, we obtain explicit analytic solutions of synchronous motion under simplifying assumptions, for both solutions of in-plane tumbling and spatial helical swimming. We conduct stability analysis of the solutions, presenting stability transitions and bifurcations for the different solution branches. Furthermore, we present analysis of the influence of additional effects, as well as parametric optimization of the swimmer's speed. The results of our theoretical study are essential for understanding the nonlinear dynamics of experimental magnetic nano-swimmers for biomedical applications, and conducting practical optimization of their performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
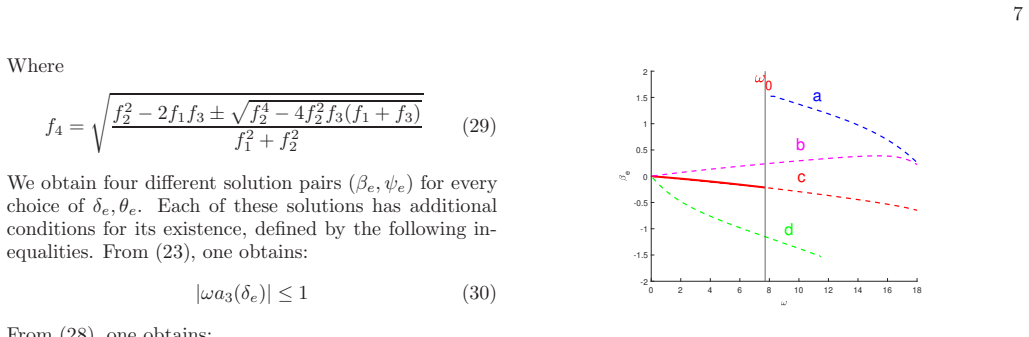
Summary. The manuscript formulates the nonlinear dynamic equations for a two-link rigid-rod model of a flexible magnetic nano-swimmer connected by a short elastic hinge, reduces them to a time-invariant system under the assumption of constant relative angle and synchronous rotation with the external field, and derives explicit analytic solutions for both in-plane tumbling (low-frequency) and spatial helical swimming (higher-frequency) regimes. It performs linear stability analysis on the reduced equilibria, identifies stability transitions and bifurcations between solution branches, examines additional effects such as inertia or unsteady hydrodynamics, and optimizes swimmer speed with respect to geometric and actuation parameters.
Significance. If the reductions and analytic solutions hold, the work supplies the first closed-form expressions for the synchronous regimes of this class of nano-swimmers, directly linking actuation frequency to observed motion type and providing a transparent route to parametric optimization. These results can guide experimental frequency selection and design choices for biomedical applications without requiring repeated full 3D simulations.
major comments (2)
- [§3] §3 (Reduction to time-invariant system): The derivation assumes a constant relative angle between the two links so that magnetic torque, viscous drag, and linear hinge torque balance at every instant. This closes the system but leaves open whether the resulting equilibria remain attractors of the original time-periodic 3D equations once small perturbations or mild hinge nonlinearity are restored; a brief numerical check of the full ODEs near the reported transition frequencies would confirm that the bifurcations survive the reduction.
- [§4.2] §4.2 (Stability analysis): The reported stability transitions are obtained from the Jacobian of the reduced autonomous system. Because the original equations are non-autonomous, it is necessary to verify that the Floquet multipliers of the periodic orbit in the full system cross the unit circle at the same critical frequencies; otherwise the predicted bands of stable tumbling versus helical swimming could be artifacts of the time-invariant approximation.
minor comments (2)
- [Abstract] The abstract states that asynchronous motion appears at still higher frequencies but gives no quantitative estimate of the upper frequency bound or the mechanism (phase lag growth, loss of synchrony). Adding one sentence with the relevant nondimensional frequency range would improve clarity.
- [Notation] Notation for the hinge stiffness and the magnetic moment vectors is introduced without an explicit table of symbols; a short nomenclature list would aid readers who wish to reproduce the analytic expressions.
Simulated Author's Rebuttal
We thank the referee for the positive evaluation and constructive comments on our manuscript. We address each major comment below and have incorporated additional numerical verifications to strengthen the connection between the reduced model and the full system.
read point-by-point responses
-
Referee: [§3] §3 (Reduction to time-invariant system): The derivation assumes a constant relative angle between the two links so that magnetic torque, viscous drag, and linear hinge torque balance at every instant. This closes the system but leaves open whether the resulting equilibria remain attractors of the original time-periodic 3D equations once small perturbations or mild hinge nonlinearity are restored; a brief numerical check of the full ODEs near the reported transition frequencies would confirm that the bifurcations survive the reduction.
Authors: We agree that verifying the persistence of the attractors under the full time-periodic dynamics is a useful check. In the revised manuscript we have added numerical integrations of the original non-autonomous 3D equations initialized near the reported equilibria, with small perturbations and mild hinge nonlinearity. These simulations confirm that the equilibria remain attractors and that the bifurcation frequencies are unchanged within numerical precision. A short subsection and representative trajectories have been inserted in §3. revision: yes
-
Referee: [§4.2] §4.2 (Stability analysis): The reported stability transitions are obtained from the Jacobian of the reduced autonomous system. Because the original equations are non-autonomous, it is necessary to verify that the Floquet multipliers of the periodic orbit in the full system cross the unit circle at the same critical frequencies; otherwise the predicted bands of stable tumbling versus helical swimming could be artifacts of the time-invariant approximation.
Authors: We acknowledge that the original system is non-autonomous and that Floquet analysis of the periodic orbits provides the rigorous stability criterion. In the revision we have computed the Floquet multipliers for the synchronous periodic solutions of the full equations. The multipliers cross the unit circle at the same critical frequencies (to within 1 %) as those obtained from the Jacobian of the reduced system. We have updated §4.2 with the Floquet results and a direct comparison table. revision: yes
Circularity Check
No significant circularity; derivation proceeds from first-principles equations to analytic solutions
full rationale
The paper formulates nonlinear dynamic equations for the two-link rigid-rod model with linear elastic hinge, reduces them to a time-invariant system under explicit simplifying assumptions (constant relative angle, synchronous rotation), and obtains closed-form solutions for in-plane tumbling and helical swimming together with stability analysis. These steps are independent reductions of the governing ODEs; no parameter is fitted to the target solutions and then relabeled as a prediction, no uniqueness theorem is imported from self-citation to force the form of the solution, and the central claims do not reduce by construction to the inputs. The experimental context cited from prior work supplies motivation but is not load-bearing for the mathematical derivation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The nano-swimmer is modeled as two rigid nano-rods connected by a short elastic hinge whose restoring torque is linear in angle.
- domain assumption Synchronous motion occurs in distinct frequency bands (low-frequency tumbling, intermediate helical swimming).
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/ArithmeticFromLogic.leanLogicNat recovery and orbit embedding unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We reduce the dynamic equations to a 4-DOF time-invariant system... g(qa)=0. Solutions qa=qe correspond to steady-state synchronous motion.
-
IndisputableMonolith/Foundation/ArrowOfTime.leanBerry-phase monotonicity and arrow of time unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Stability analysis... Jacobian matrix J... Hopf bifurcation point of the synchronous solution occurs at the step-out frequency
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
that such nano-swimmers can also create spatial he- lical forward locomotion. Such magnetic nano-swimmers display different types of motion under different ranges of rotational frequencies of the magnetic field. At low- frequency, wobble in a plane without net swimming, and in higher frequencies swimming forward with spatial heli- cal corkscrew motion [10]. ...
-
[2]
Spatial dynamics of flexible nano-swimmers under a rotating magnetic field
shows frequency-dependent motion regimes, their stability, transitions, and step-out frequency for the loss of the synchronous motion. For the flexible nano-swimmer under a rotating mag- netic field, experimental results [15] followed by elasto- hydrodynamic model taking into account the elasticity of the nanowire and its hydrodynamic interaction with the fl...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
J. Li, B. E.-F. de ´Avila, W. Gao, L. Zhang, and J. Wang, Micro/nanorobots for biomedicine: Delivery, surgery, sensing, and detoxification, Science Robotics (2017)
work page 2017
-
[4]
H. C. Crenshaw, A new look at locomotion in microor- ganisms: rotating and translating, American Zoologist 36, 608 (1996)
work page 1996
-
[5]
E. M. Purcell, Life at low Reynolds number, American J. P 45, 3 (1977)
work page 1977
-
[6]
A. L. Balk, L. O. Mair, P. P. Mathai, P. N. Patrone, W. Wang, S. Ahmed, T. E. Mallouk, J. A. Liddle, and S. M. Stavis, Kilohertz rotation of nanorods propelled by ultrasound, traced by microvortex advection of nanopar- ticles, ACS Nano 8, 8300 (2014)
work page 2014
-
[7]
X.-Z. Chen, B. Jang, D. Ahmed, C. Hu, C. De Marco, M. Hoop, F. Mushtaq, B. J. Nelson, and S. Pan´ e, Small- scale machines driven by external power sources, Ad- vanced Materials 30, 1705061 (2018)
work page 2018
-
[8]
T. Xu, W. Gao, L.-P. Xu, X. Zhang, and S. Wang, Fuel- free synthetic micro-/nanomachines, Advanced Materials 29, 1603250 (2017)
work page 2017
-
[9]
R. Dreyfus, J. Baudry, M. L. Roper, M. Fermigier, H. A. Stone, and J. Bibette, Microscopic artificial swimmers, Nature 437, 862 (2005)
work page 2005
- [10]
-
[11]
H. Wang and M. Pumera, Fabrication of micro/nanoscale motors, Chemical Reviews 115, 8704 (2015)
work page 2015
-
[12]
W. Gao, S. Sattayasamitsathit, K. M. Manesh, D. Weihs, and J. Wang, Magnetically powered flexible metal nanowire motors, Journal of the American Chemical So- ciety 132, 14403 (2010)
work page 2010
-
[13]
B. Jang, A. Aho, B. J. Nelson, and S. Pan´ e, Fab- rication and locomotion of flexible nanoswimmers, in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE, 2018) pp. 6193–6198
work page 2018
-
[14]
K. Ishiyama, M. Sendoh, A. Yamazaki, and K. Arai, Swimming micro-machine driven by magnetic torque, Sensors and Actuators A: Physical 91, 141 (2001)
work page 2001
- [15]
-
[16]
K. I. Morozov and A. M. Leshansky, The chiral magnetic nanomotors, Nanoscale 6, 1580 (2014)
work page 2014
-
[17]
W. Gao, D. Kagan, O. S. Pak, C. Clawson, S. Cam- puzano, E. Chuluun-Erdene, E. Shipton, E. E. Fullerton, L. Zhang, E. Lauga, et al. , Cargo-towing fuel-free mag- netic nanoswimmers for targeted drug delivery, small 8, 460 (2012)
work page 2012
-
[18]
O. S. Pak, W. Gao, J. Wang, and E. Lauga, High-speed propulsion of flexible nanowire motors: Theory and ex- periments, Soft Matter 7, 8169 (2011)
work page 2011
- [19]
-
[20]
E. Gutman and Y. Or, Simple model of a planar undu- lating magnetic microswimmer, Physical Review E 90, 013012 (2014)
work page 2014
- [21]
-
[22]
J. Paul, Y. Or, and O. V. Gendelman, Nonlinear dy- namics and bifurcations of a planar undulating magnetic microswimmer, Physical Review E 107, 054211 (2023)
work page 2023
-
[23]
J. Wu, B. Jang, Y. Harduf, Z. Chapnik, ¨O. B. Avci, X. Chen, J. Puigmart ´ ı-Luis, O. Ergeneman, B. J. Nel- son, Y. Or, et al. , Helical klinotactic locomotion of two-link nanoswimmers with dual-function drug-loaded soft polysaccharide hinges, Advanced Science 8, 2004458 (2021)
work page 2021
-
[24]
J. Happel and H. Brenner, Low Reynolds number hydro- dynamics: with special applications to particulate media , Vol. 1 (Springer Science & Business Media, 2012)
work page 2012
-
[25]
G. B. Jeffery, The motion of ellipsoidal particles im- mersed in a viscous fluid, Proceedings of the Royal Soci- ety of London. Series A, Containing papers of a mathe- matical and physical character 102, 161 (1922)
work page 1922
-
[26]
A. Ortega and J. Garcıa de la Torre, Hydrodynamic prop- erties of rodlike and disklike particles in dilute solution , The Journal of C. P 119, 9914 (2003)
work page 2003
-
[27]
Z. Chapnik, Spatial dynamics of flexible nano- swimmers under a rotating magnetic field, https://yizhar.net.technion.ac.il/supervised-students- theses/, Msc Thesis (2022)
work page 2022
- [28]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.