MIMIC: Multimodal Inversion for Model Interpretation and Conceptualization
Pith reviewed 2026-05-18 23:43 UTC · model grok-4.3
The pith
MIMIC inverts internal encodings of vision-language models to recover visual concepts
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MIMIC performs the first model inversion for visual interpretations of VLM concepts by combining joint VLM-based inversion, feature alignment to match autoregressive behavior, and a triplet of regularizers that enforce spatial alignment, natural image smoothness, and semantic realism, then validates the outputs with both standard visual metrics and semantic text-based metrics.
What carries the argument
Joint VLM-based inversion with feature alignment plus a triplet of regularizers for spatial alignment, natural image smoothness, and semantic realism.
If this is right
- Visual inspection of VLM concepts becomes feasible for outputs of varying length.
- Quantitative comparison of model concepts against human judgments is now possible using both image quality and text-semantic scores.
- Transparency increases because generated images can be directly compared to what the model claims to have understood.
- Debugging of VLM behavior gains a visual channel that reveals mismatches between internal encodings and intended meaning.
Where Pith is reading between the lines
- The same inversion pipeline could be tested on other multimodal architectures to see whether the regularizer triplet generalizes beyond current VLMs.
- If the recovered images prove stable, they could serve as training targets for fine-tuning models toward more human-aligned concepts.
- The method opens a route to systematic auditing of large-scale VLMs by turning opaque internal states into a visual audit trail.
Load-bearing premise
The feature alignment and three regularizers together can recover visual concepts from VLM encodings without adding artifacts that change the original semantics.
What would settle it
Run MIMIC on known VLM prompts such as 'a red sports car on a highway' and test whether human raters or separate semantic embedding distances judge the generated images as matching the prompt semantics at rates above random chance.
Figures




read the original abstract
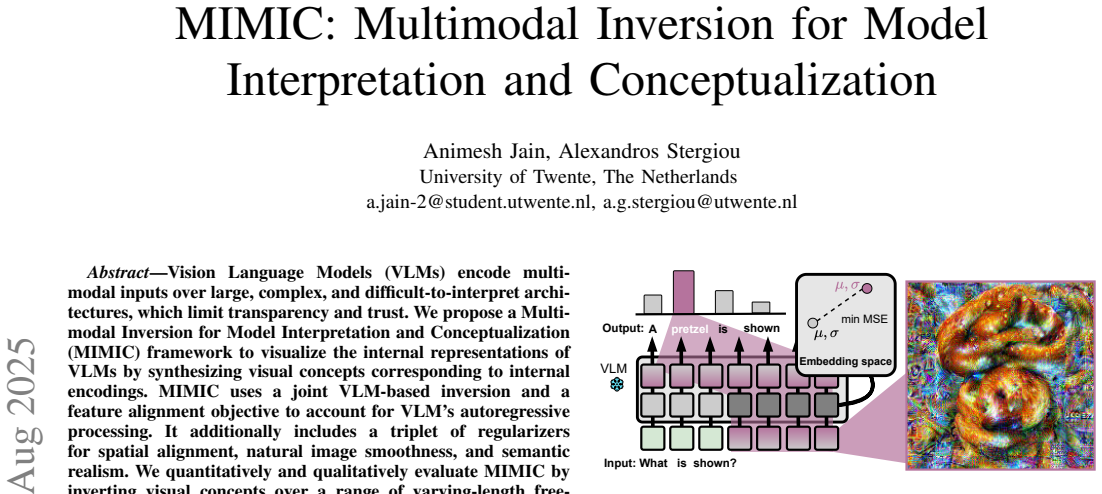
Vision Language Models (VLMs) encode multimodal inputs over large, complex, and difficult-to-interpret architectures, which limit transparency and trust. We propose a Multimodal Inversion for Model Interpretation and Conceptualization (MIMIC) framework that inverts the internal encodings of VLMs. MIMIC uses a joint VLM-based inversion and a feature alignment objective to account for VLM's autoregressive processing. It additionally includes a triplet of regularizers for spatial alignment, natural image smoothness, and semantic realism. We evaluate MIMIC both quantitatively and qualitatively by inverting visual concepts across a range of free-form VLM outputs of varying length. Reported results include both standard visual quality metrics and semantic text-based metrics. To the best of our knowledge, this is the first model inversion approach addressing visual interpretations of VLM concepts.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes MIMIC, a framework for inverting the internal encodings of Vision-Language Models (VLMs) to enable visual interpretations of concepts. It employs joint VLM-based inversion combined with a feature alignment objective to handle autoregressive processing, plus a triplet of regularizers enforcing spatial alignment, natural image smoothness, and semantic realism. The method is evaluated quantitatively via standard visual quality metrics and semantically via text-based metrics on free-form VLM outputs of varying lengths, with the claim that it is the first model inversion approach targeting visual interpretations of VLM concepts.
Significance. If the quantitative and qualitative results hold under scrutiny, this would represent a meaningful advance in VLM interpretability by providing a practical way to recover visual concepts from internal multimodal encodings. The combination of feature alignment with domain-specific regularizers addresses a clear gap between existing inversion techniques (primarily for unimodal models) and the needs of autoregressive VLMs, potentially aiding transparency and trust in deployed multimodal systems.
major comments (1)
- [Evaluation section (quantitative results)] The central claim that the triplet of regularizers plus feature alignment faithfully recovers semantics without distorting artifacts is load-bearing, yet the manuscript provides no ablation isolating the contribution of each regularizer or quantifying artifact introduction (e.g., via semantic drift metrics before/after each term). This leaves open whether the observed visual quality stems from the inversion procedure itself or from the specific regularizer balance.
minor comments (2)
- [Abstract] The abstract states that results include 'standard visual quality metrics and semantic text-based metrics' but does not report any concrete values or baselines; adding one or two key numbers (with error bars) would strengthen the summary.
- [Method] Notation for the feature alignment objective and the three regularizer terms should be introduced with explicit equations early in the method section to improve readability for readers unfamiliar with VLM inversion.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive assessment of the work. We address the single major comment below.
read point-by-point responses
-
Referee: [Evaluation section (quantitative results)] The central claim that the triplet of regularizers plus feature alignment faithfully recovers semantics without distorting artifacts is load-bearing, yet the manuscript provides no ablation isolating the contribution of each regularizer or quantifying artifact introduction (e.g., via semantic drift metrics before/after each term). This leaves open whether the observed visual quality stems from the inversion procedure itself or from the specific regularizer balance.
Authors: We agree that isolating the contribution of each regularizer would provide stronger evidence for the central claim. Our current results demonstrate that the full combination of joint inversion, feature alignment, and the three regularizers yields superior visual quality and semantic fidelity compared to baselines. However, to directly address the concern about potential artifacts or whether gains arise primarily from the base inversion, we will add targeted ablations in the revised manuscript. These will include variants that disable each regularizer individually (spatial alignment, smoothness, and semantic realism) while keeping the inversion and alignment objectives fixed, and we will report both standard visual metrics and new semantic drift metrics (e.g., CLIP-based concept consistency before/after each term). This will clarify the necessity of the balanced regularizer set for artifact-free recovery. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper introduces MIMIC as a new optimization-based inversion framework that combines joint VLM inversion, feature alignment for autoregressive processing, and three explicit regularizers (spatial alignment, smoothness, semantic realism). No equations, fitted parameters, or self-citations are presented that reduce the inversion outputs or claimed visual interpretations to a re-expression of the inputs by construction. The central procedure is described as a novel combination of standard inversion techniques with domain-specific regularizers, evaluated on independent quantitative and qualitative metrics, rendering the derivation self-contained.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
MIMIC uses a joint VLM-based inversion and a feature alignment objective... triplet of regularizers for spatial alignment, natural image smoothness, and semantic realism... aggregated objective γ1 L_SCE + γ2 L_base + R(bv)
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We propose a Multimodal Inversion for Model Interpretation and Conceptualization (MIMIC) framework
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 1 Pith paper
-
TRANSPORTER: Transferring Visual Semantics from VLM Manifolds
TRANSPORTER generates videos from VLM logits using optimal transport to interpret model predictions on object attributes, actions, and scenes.
Reference graph
Works this paper leans on
-
[1]
Faithlm: Towards faithful explanations for large language models,
Yu-Neng Chuang, Guanchu Wang, et al., “Faithlm: Towards faithful explanations for large language models,” arxiv:2402.04678, 2024
-
[2]
Selfie: Self-interpretation of large language model em- beddings,
Haozhe Chen, Carl V ondrick, and Chengzhi Mao, “Selfie: Self-interpretation of large language model em- beddings,” inICML, 2024
work page 2024
-
[3]
Patch- scopes: A unifying framework for inspecting hidden representations of language models,
Asma Ghandeharioun, Avi Caciularu, et al., “Patch- scopes: A unifying framework for inspecting hidden representations of language models,” inICML, 2024
work page 2024
-
[4]
Roger Grosse, Juhan Bae, et al., “Studying large lan- guage model generalization with influence functions,” arxiv:2308.03296, 2023
-
[5]
Locating and editing factual associations in gpt,
Kevin Meng, David Bau, et al., “Locating and editing factual associations in gpt,” inNeurIPS, 2023
work page 2023
-
[6]
Towards A Rigorous Science of Interpretable Machine Learning
Finale Doshi-Velez and Been Kim, “Towards a rigorous science of interpretable machine learning,” arxiv:1702.08608, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[7]
Grad-cam: Visual explanations from deep networks via gradient-based localization,
Ramprasaath R Selvaraju, Michael Cogswell, et al., “Grad-cam: Visual explanations from deep networks via gradient-based localization,” inICCV, 2017
work page 2017
-
[8]
Ax- iomatic attribution for deep networks,
Mukund Sundararajan, Ankur Taly, and Qiqi Yan, “Ax- iomatic attribution for deep networks,” inICML, 2017
work page 2017
-
[9]
Do vision transformers see like convolutional neural networks?,
Maithra Raghu, Thomas Unterthiner, et al., “Do vision transformers see like convolutional neural networks?,” in NeurIPS, 2021
work page 2021
-
[10]
Grad-eclip: Gradient- based visual and textual explanations for clip,
Chenyang Zhao, Kun Wang, et al., “Grad-eclip: Gradient- based visual and textual explanations for clip,” inICML, 2024
work page 2024
-
[11]
Michal Golovanevsky, William Rudman, et al., “What do vlms notice? a mechanistic interpretability pipeline for gaussian-noise-free text-image corruption and evalu- ation,” inACL, 2025
work page 2025
-
[12]
Learning deep features for discriminative localization,
Bolei Zhou, Aditya Khosla, et al., “Learning deep features for discriminative localization,” inCVPR, 2016
work page 2016
-
[13]
Score-cam: Score- weighted visual explanations for convolutional neural networks,
Haofan Wang, Zifan Wang, et al., “Score-cam: Score- weighted visual explanations for convolutional neural networks,” inCVPRw, 2020
work page 2020
-
[14]
On pixel-wise explanations for non-linear classifier decisions by layer- wise relevance propagation,
Sebastian Bach, Alexander Binder, et al., “On pixel-wise explanations for non-linear classifier decisions by layer- wise relevance propagation,”PLOS ONE, 2015
work page 2015
-
[15]
Learning important features through propagating activation differences,
Avanti Shrikumar, Peyton Greenside, and Anshul Kun- daje, “Learning important features through propagating activation differences,” inICML, 2017
work page 2017
-
[16]
Dreaming to distill: Data-free knowledge transfer via deepinversion,
Hongxu Yin, Pavlo Molchanov, et al., “Dreaming to distill: Data-free knowledge transfer via deepinversion,” inCVPR, 2020
work page 2020
-
[17]
Gradvit: Gradient inversion of vision transformers,
Ali Hatamizadeh, Hongxu Yin, et al., “Gradvit: Gradient inversion of vision transformers,” inCVPR, 2022
work page 2022
-
[18]
Plug-in inversion: Model-agnostic inversion for vision with data augmenta- tions,
Amin Ghiasi, Hamid Kazemi, et al., “Plug-in inversion: Model-agnostic inversion for vision with data augmenta- tions,” inICML, 2022
work page 2022
-
[19]
The mind’s eye: Visualizing class- agnostic features of cnns,
Alexandros Stergiou, “The mind’s eye: Visualizing class- agnostic features of cnns,” inICIP, 2021
work page 2021
-
[20]
Understanding neural networks through deep visualization,
Jason Yosinski, Jeff Clune, et al., “Understanding neural networks through deep visualization,” inICMLw, 2015
work page 2015
-
[21]
Plug & play generative networks: Conditional iterative generation of images in latent space,
Anh Nguyen, Jeff Clune, et al., “Plug & play generative networks: Conditional iterative generation of images in latent space,” inCVPR, 2017
work page 2017
-
[22]
Imagenet: A large-scale hierarchical image database,
Jia Deng, Wei Dong, et al., “Imagenet: A large-scale hierarchical image database,” inCVPR, 2009
work page 2009
-
[23]
Craft: Concept recursive activation factorization for explainability,
Thomas Fel, Agustin Picard, et al., “Craft: Concept recursive activation factorization for explainability,” in CVPR, 2023
work page 2023
-
[24]
Universal sparse autoencoders: Interpretable cross-model concept alignment,
Harrish Thasarathan, Julian Forsyth, et al., “Universal sparse autoencoders: Interpretable cross-model concept alignment,” inICML, 2025
work page 2025
-
[25]
Lora: Low-rank adaptation of large language models.,
Edward J Hu, Yelong Shen, et al., “Lora: Low-rank adaptation of large language models.,”ICLR, 2022
work page 2022
-
[26]
Interpreting the second-order effects of neurons in clip,
Yossi Gandelsman, Alexei A. Efros, and Jacob Stein- hardt, “Interpreting the second-order effects of neurons in clip,” inICLR, 2025
work page 2025
-
[27]
Probing multimodal large language models for global and local semantic representations,
Mingxu Tao, Quzhe Huang, et al., “Probing multimodal large language models for global and local semantic representations,” inLREC-COLING, 2024
work page 2024
-
[28]
Linear expla- nations for individual neurons,
Tuomas Oikarinen and Tsui-Wei Weng, “Linear expla- nations for individual neurons,” inICML, 2024
work page 2024
-
[29]
From colors to classes: Emergence of concepts in vision transform- ers,
Teresa Dorszewski, Lenka T ˇetkov´a, et al., “From colors to classes: Emergence of concepts in vision transform- ers,”arxiv:2503.24071, 2025
-
[30]
Deep residual learning for image recognition,
Kaiming He, Xiangyu Zhang, et al., “Deep residual learning for image recognition,” inCVPR, 2016
work page 2016
-
[31]
Rethink- ing the inception architecture for computer vision,
Christian Szegedy, Vincent Vanhoucke, et al., “Rethink- ing the inception architecture for computer vision,” in CVPR, 2016
work page 2016
-
[32]
Mobilenetv2: Inverted residuals and linear bottlenecks,
Mark Sandler, Andrew Howard, et al., “Mobilenetv2: Inverted residuals and linear bottlenecks,” inCVPR, 2018
work page 2018
-
[33]
Improved baselines with visual instruction tuning,
Haotian Liu, Chunyuan Li, et al., “Improved baselines with visual instruction tuning,” inCVPR, 2024
work page 2024
-
[34]
Learning transfer- able visual models from natural language supervision,
Alec Radford, Jong Wook Kim, et al., “Learning transfer- able visual models from natural language supervision,” inICML, 2021
work page 2021
- [35]
-
[36]
The unreasonable effectiveness of deep features as a perceptual metric,
Richard Zhang, Phillip Isola, et al., “The unreasonable effectiveness of deep features as a perceptual metric,” in CVPR, 2018
work page 2018
-
[37]
Clipscore: A reference-free evaluation metric for image captioning,
Jack Hessel, Ari Holtzman, et al., “Clipscore: A reference-free evaluation metric for image captioning,” inEMNLPS, 2022
work page 2022
-
[38]
Gans trained by a two time-scale update rule converge to a local nash equilibrium,
Martin Heusel, Hubert Ramsauer, Thomas Unterthiner, Bernhard Nessler, and Sepp Hochreiter, “Gans trained by a two time-scale update rule converge to a local nash equilibrium,”NeurIPS, 2017
work page 2017
-
[39]
Improved tech- niques for training gans,
Tim Salimans, Ian Goodfellow, et al., “Improved tech- niques for training gans,”NeurIPS, 2016
work page 2016
-
[40]
Effectively unbiased fid inception score and where to find them,
Min Chong and David Forsyth, “Effectively unbiased fid inception score and where to find them,” inCVPR, 2020
work page 2020
-
[41]
Bleu: a method for automatic evaluation of machine translation,
Kishore Papineni, Salim Roukos, et al., “Bleu: a method for automatic evaluation of machine translation,” inACL, 2002
work page 2002
-
[42]
Meteor: An auto- matic metric for mt evaluation with improved correlation with human judgments,
Satanjeev Banerjee and Alon Lavie, “Meteor: An auto- matic metric for mt evaluation with improved correlation with human judgments,” inACLw, 2005
work page 2005
-
[43]
Rouge: A package for automatic evalu- ation of summaries,
Lin Chin-Yew, “Rouge: A package for automatic evalu- ation of summaries,” inTSBOw, 2004. APPENDIXA VIT INVERSION WITHMIMIC In addition to VLMs, we applyMIMICon Vision Trans- formers (ViTs) used on image classification objectives. For these experiments, we initialize an updatable input bvas in Sec. III. The synthesized image is then passed through the froz...
work page 2004
-
[44]
All other hyperparameters and training settings remain unchanged
Implementation Details:We follow the same experi- mental configuration as in the main inversion setup, with two modifications: the optimization is performed for3000 iterations, and the scaling factorsα 1, α2, α3, β2, γ1,andγ 2 are set to1.0whileβ 1 is set to1×10 −4. All other hyperparameters and training settings remain unchanged
-
[45]
Results:As shown in Fig. B-1, replacing theℓ 2-based base feature loss with a KL-divergence formulation produces synthesized images that are less noisy and capture more distinctive semantic details, such as fine textures and clearer object boundaries (e.g., the fins of the goldfish, the body structure of the retriever, and the braided form of the pretzel)...
-
[46]
Templates used are shown in Fig
V arying target length:We evaluate the impact of [target]length using fixed templates with|ˆy| ∈ {4,5,7}. Templates used are shown in Fig. B-2 and the corresponding quantitative and qualitative results are shown in Table II and Figs. 5 and 6. Despite variation in length, the reconstructed images remain visually consistent, and the predicted outputs preser...
-
[47]
V arying target description:We further examine the effect of using more natural, free-form descriptions from the templates shown in Fig. B-3. Table B-II comparesdescriptions D1 (Fig. B-4a) andD 2 (Fig. B-4b) with differing lexical structures. We observe that text similarity metrics such as BLEU and ROUGE-L are slightly lower than those observed in the fix...
-
[48]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
A. Dosovitskiy et al., “An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale,” arXiv:2010.11929, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[49]
O. M. Parkhi, A. Vedaldi, A. Zisserman, and C. V . Jawahar, “Cats and dogs,” in IEEE Xplore, 2012
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.