Trajectory Generation for UAVs in Unknown Environments with Extreme Wind Disturbances
Pith reviewed 2026-05-25 17:47 UTC · model grok-4.3
The pith
UAVs generate and track trajectories in extreme winds by switching to a drift frame aligned with the prevailing wind.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
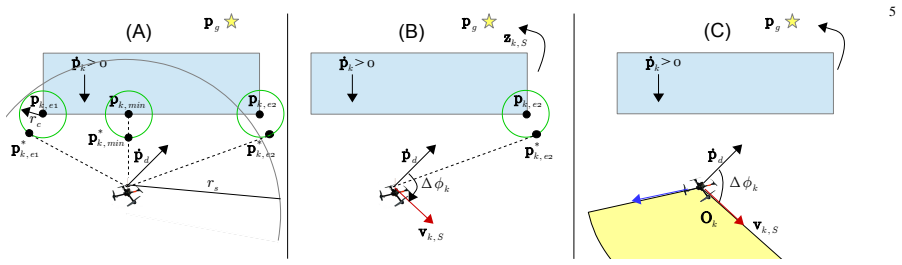
The controller switches between normal and drift modes; in drift mode a frame moving with the prevailing wind allows the UAV to maintain control authority by relaxing inertial-frame tracking requirements and replanning trajectories inside the moving frame, with established guarantees on tracking, collision avoidance, and thrust/sensor limits.
What carries the argument
The drift frame, a coordinate system translating at the prevailing wind velocity, inside which the UAV regains sufficient control authority for trajectory generation and tracking.
If this is right
- UAVs can continue navigation through unknown regions where wind exceeds stability limits without immediate loss of control.
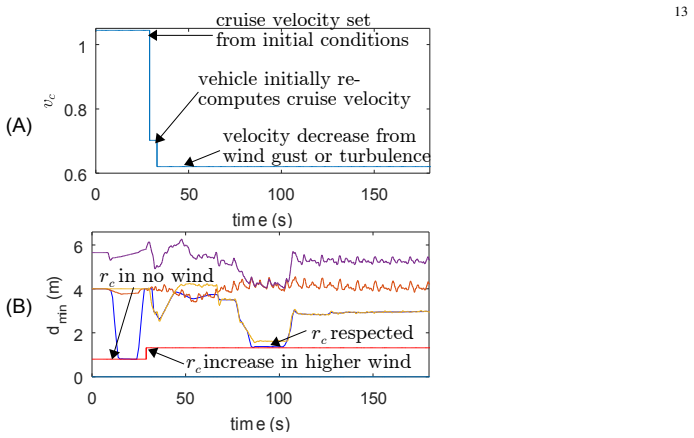
- On-board parameter updates allow vehicles to adapt navigation when crossing between protected and windy zones.
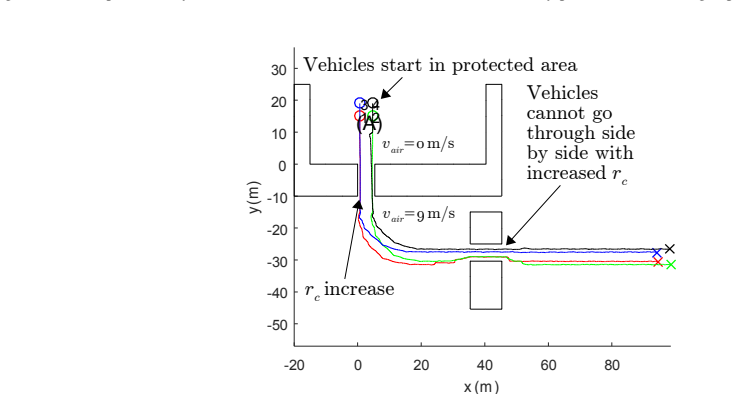
- Multiple vehicles can safely pass through narrow openings while one or more operate in drift mode.
Where Pith is reading between the lines
- The approach could be tested with slowly varying rather than strictly constant winds to check robustness of the drift-frame assumption.
- Integration with real-time wind estimation from onboard sensors might reduce reliance on a pre-established constant wind velocity.
- Similar mode-switching logic could apply to other platforms such as fixed-wing aircraft encountering gusts that exceed their stability envelope.
Load-bearing premise
A roughly constant prevailing wind velocity can be identified and used to define a moving frame in which the vehicle regains adequate control authority.
What would settle it
A UAV that loses control authority or violates thrust limits after entering drift mode inside a constant wind field exceeding the stability bounds.
Figures
read the original abstract
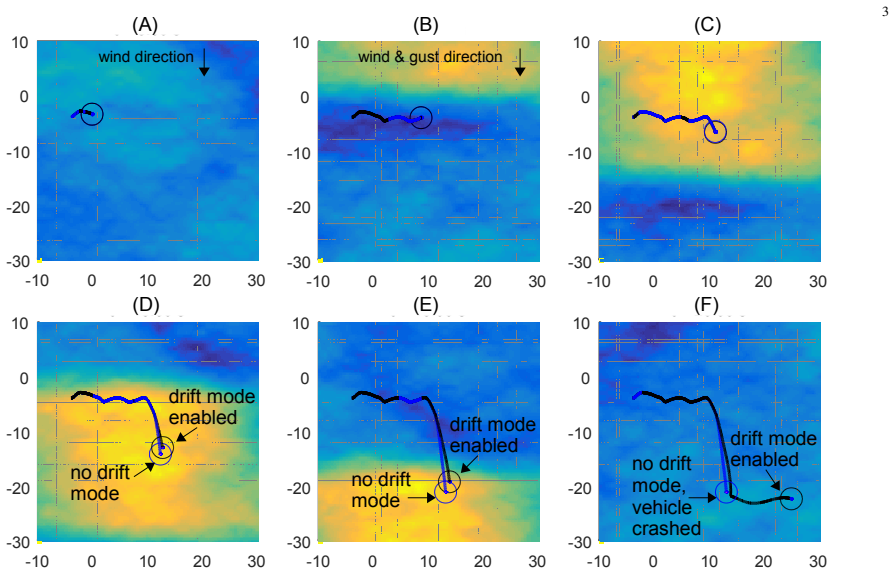
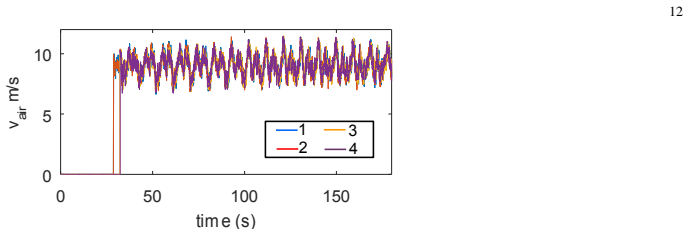
The widespread use of unmanned aerial vehicles (UAVs) by the military, commercial companies, and academia continues to push research for autonomous vehicle navigation, particularly in varying environmental conditions and beyond-line-of-sight (BLOS) applications. This article addresses trajectory generation for UAVs operating in extreme environments where the wind disturbances may exceed the vehicle's closed-loop stability bounds. To do this, a controller is developed that has two modes of operation: (1) normal mode, and (2) drift mode. In the normal mode the vehicle's thrust and sensor limitations are not exceeded by environmental conditions, whereas in the drift mode they are. In the drift mode, a drift frame that moves with the prevailing wind is established in which the vehicle maintains control authority to generate and track trajectories. The vehicle maintains control authority by relaxing the inertial frame trajectory tracking requirement and re-planning the trajectory in the drift frame. Guarantees are established to ensure tracking of the trajectory, collision avoidance, and respecting the vehicle thrust and sensor limitations. Simulation results demonstrate the algorithm properties through two scenarios. First, the performance of two quadrotors is compared where one utilizes the drift mode and the other does not. Second, multiple vehicles navigate through two narrow openings between protected and windy environments to demonstrate on-board updates to navigation parameters based on environmental conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a two-mode controller for UAV trajectory generation in extreme wind disturbances exceeding closed-loop stability bounds. Normal mode operates when environmental conditions respect thrust and sensor limits; drift mode establishes a moving drift frame aligned with the prevailing wind, relaxes inertial-frame tracking, and re-plans trajectories within that frame to regain control authority. Formal guarantees are asserted for trajectory tracking, collision avoidance, and actuator/sensor limit satisfaction. Validation consists of two simulation scenarios: a comparison of two quadrotors (one using drift mode) and multi-vehicle navigation through narrow openings with on-board parameter updates.
Significance. If the asserted guarantees can be rigorously established, the approach would enable safe UAV operation in previously inaccessible extreme-wind regimes, directly addressing BLOS and unknown-environment applications. The dual-mode structure and on-board adaptation are practically motivated; the simulation scenarios illustrate multi-agent coordination under wind transitions.
major comments (3)
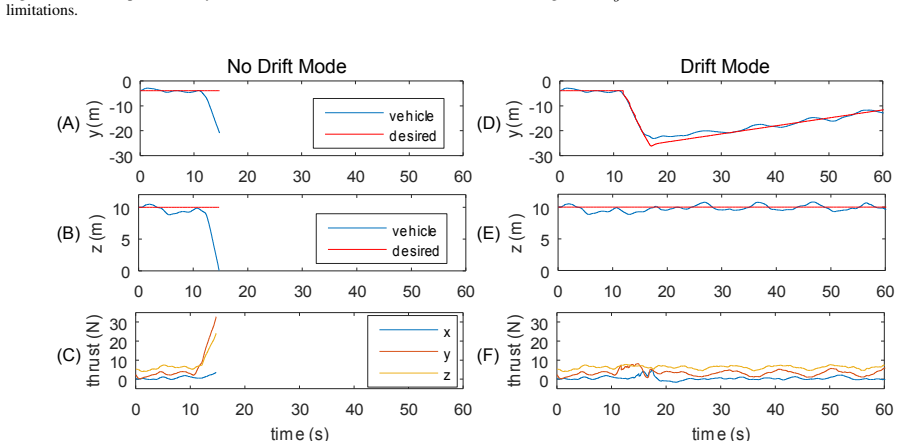
- [Abstract] Abstract: The central claim that 'Guarantees are established to ensure tracking of the trajectory, collision avoidance, and respecting the vehicle thrust and sensor limitations' is unsupported by any derivation, Lyapunov analysis, invariant-set argument, or error-bound derivation. The only evidence cited is two simulation scenarios whose wind models, disturbance spectra, and quantitative performance metrics are not reported; this absence is load-bearing for the paper's contribution.
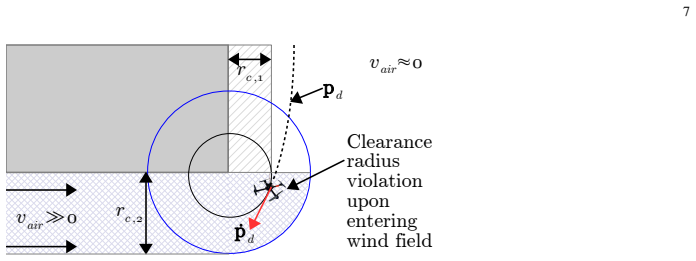
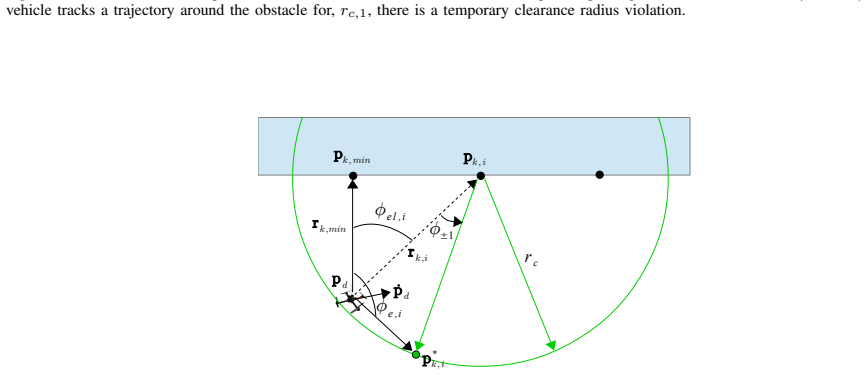
- [Abstract] Abstract (drift-mode paragraph): The construction of the drift frame assumes the wind velocity is 'prevailing' and sufficiently constant that the frame remains well-defined and that relaxed inertial tracking still maps to collision-free inertial motion. No bound on admissible wind variation, no estimation procedure for frame velocity, and no analysis of mode-switching transients are supplied; violation of the implicit constancy assumption would invalidate the claimed collision-avoidance guarantee.
- [Abstract] Abstract (simulation section): The second scenario claims 'on-board updates to navigation parameters based on environmental conditions,' yet supplies neither the update law, the sensor model used to detect wind changes, nor a proof that the updates preserve the formal guarantees when the environment is unknown.
Simulated Author's Rebuttal
Thank you for the referee's insightful comments. We provide point-by-point responses to the major comments below, agreeing that revisions are necessary to strengthen the formal aspects of the paper.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'Guarantees are established to ensure tracking of the trajectory, collision avoidance, and respecting the vehicle thrust and sensor limitations' is unsupported by any derivation, Lyapunov analysis, invariant-set argument, or error-bound derivation. The only evidence cited is two simulation scenarios whose wind models, disturbance spectra, and quantitative performance metrics are not reported; this absence is load-bearing for the paper's contribution.
Authors: The referee is correct; the manuscript as presented does not include the detailed derivations or simulation parameters to support the guarantee claims. We will revise the manuscript to incorporate Lyapunov analysis, invariant-set arguments, error bounds, and expanded simulation details including wind models and quantitative metrics. revision: yes
-
Referee: [Abstract] Abstract (drift-mode paragraph): The construction of the drift frame assumes the wind velocity is 'prevailing' and sufficiently constant that the frame remains well-defined and that relaxed inertial tracking still maps to collision-free inertial motion. No bound on admissible wind variation, no estimation procedure for frame velocity, and no analysis of mode-switching transients are supplied; violation of the implicit constancy assumption would invalidate the claimed collision-avoidance guarantee.
Authors: We agree with this assessment. The current manuscript lacks explicit bounds on wind variation and analysis of transients. In the revision, we will add these elements: admissible wind variation bounds, an onboard estimation procedure for the drift frame velocity, and a transient analysis for mode switches to support the collision avoidance guarantee. revision: yes
-
Referee: [Abstract] Abstract (simulation section): The second scenario claims 'on-board updates to navigation parameters based on environmental conditions,' yet supplies neither the update law, the sensor model used to detect wind changes, nor a proof that the updates preserve the formal guarantees when the environment is unknown.
Authors: This comment is valid. The manuscript does not provide the update law or sensor model. We will revise to include the update law, the sensor model for wind detection, and an argument or proof that the guarantees are maintained under these updates in unknown environments. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper defines a two-mode controller (normal and drift) for UAVs in extreme wind, with the drift mode using a moving frame aligned to prevailing wind to relax inertial tracking and re-plan trajectories while claiming guarantees on tracking, collision avoidance, and actuator/sensor limits. No equations, parameter fits, or self-citations are exhibited that reduce these guarantees by construction to the mode definitions or inputs themselves; the claims rest on asserted establishment of the guarantees rather than tautological re-labeling or fitted-input predictions. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- wind-speed threshold for entering drift mode
axioms (1)
- domain assumption Wind disturbances can be treated as a prevailing constant velocity that defines a usable moving drift frame
invented entities (1)
-
drift frame
no independent evidence
Forward citations
Cited by 1 Pith paper
-
Wind-Resilient Trajectory Optimization for UAV-BS Networks: TD3 for Continuous Service Availability
A TD3-based DRL framework optimizes UAV-BS trajectories by modeling wind as stochastic kinematic perturbations to maintain throughput stability and service availability.
Reference graph
Works this paper leans on
-
[1]
https://www.faa.gov/uas/commercial operators/
FAA - certified remote pilots including commercial operators. https://www.faa.gov/uas/commercial operators/
-
[2]
https://www.faa.gov/uas/commercial operators/part 107 waivers/ waivers issued/
FAA - part 107 waivers issued. https://www.faa.gov/uas/commercial operators/part 107 waivers/ waivers issued/
-
[3]
W. VanLoock, G. Pipeleers, M. Diehl, J. De Schutter, and J. Swevers. Optimal path following for differentially flat robotic systems through a geometric problem formulation. IEEE Transactions on Robotics , 2014
work page 2014
-
[4]
Z. Shiller, S. Sharma, I. Stern, and A. Stern. Online obstacle avoidance at high speeds. The Int. J. of Robotics Research , 2013
work page 2013
-
[5]
A. Matveev, M. Hoy, and A. Savkin. A globally converging algorithm for reactive robot navigation among moving and deforming obstacles. Automatica, 2015
work page 2015
-
[6]
E. Ferrera, J. Capit ´an, A.R. Casta ˜no, and P.J. Marr´on. Decentralized safe conflict resolution for multiple robots in dense scenarios. Robotics and Autonomous Systems , 91:179–193, 2017
work page 2017
-
[7]
M. Hoy, A. Matveev, and A. Savkin. Collision free cooperative navigation of multiple wheeled robots in unknown cluttered environments. Robotics and Autonomous Systems , 2012
work page 2012
-
[8]
H. Choi, Y . Kim, and I. Hwang. Reactive collision avoidance of unmanned aerial vehicles using a single vision sensor. Journal of Guidance, Control, and Dynamics , 2013
work page 2013
- [9]
-
[10]
K. Cole and A. Wickenheiser. Reactive trajectory generation for multiple vehicles in unknown environments with wind disturbances. IEEE Transactions on Robotics , pages 1–16, 2018
work page 2018
-
[11]
G. Dicker. Quadrotor reorientation control for collision recovery. Master’s thesis, McGill University, 2016
work page 2016
-
[12]
M. Faessler, F. Fontana, C. Forster, and D. Scaramuzza. Automatic re-initialization and failure recovery for aggressive flight with monocular vision-based quadrotor. IEEE Conference on Robotics and Automation , 2015
work page 2015
-
[13]
S. Waslander and C. Wang. Wind disturbance estimation and rejection for quadrotor position control. In AIAA Unmanned Unlimited, Seattle, WA, 2009
work page 2009
-
[14]
L.N.C. Sikkel, G.C.H.E. de Croon, Wagter C. De., and Q.P. Chu. A novel online model-based wind estimation approach for quadrotor micro air vehicles using low cost mems imus. IEEE/RSJ International Conference on Intelligent Robots and Systems , 2016
work page 2016
-
[15]
R. T. Palomaki, N. T. Rose, M. van den Bossche, T.J. Sherman, and S. F. J. De Wekker. Wind estimation in the lower atmosphere using multirotor aircraft. Journal of Atmospheric and Oceanic Technology , 2017
work page 2017
- [16]
-
[17]
P. Bruschi, M. Piotto, F. Dell’Agnello, J. Ware, and N. Roy. Wind speed and direction detection by means of solid-state anemometers embedded on small quadcopters. 30th Eurosensors Conference, 2016
work page 2016
-
[18]
P. Saab W. Kumar, A. Ben-Tzvi and M.R. Snyder. Wireless telemetry system for real-time estimation of ship air wwake with UA Vs. Mechatronics, 2016
work page 2016
-
[19]
D. Peters and N. HaQuang. Technical note: Dynamic inflow for practical applications. Journal of the American Helicopter Society , 1988
work page 1988
-
[20]
D.M. Pitt and D.A. Peters. Theoretical prediction of dynamic-inflow derivatives. Vertica, 5(1):21–34, 1981
work page 1981
- [21]
-
[22]
A.R.S. Bramwell, G. Done, and D. Balmford. Bramwell’s Helicopter Dynamics . AIAA and Butterworth-Heinemann, 2001
work page 2001
-
[23]
S. Newman. The foundations of helicopter flight . Halsted Press, 1994
work page 1994
-
[24]
G. Padfield. Helicopter Flight Dynamics: The Theory and Application of Flying Qualities and Simulation Modeling . AIAA, 1996
work page 1996
-
[25]
G. Hoffmann, H. Huang, S. Waslandar, and C. Tomlin. Quadrotor helicopter flight dynamics and control: Theory and experiment. AIAA Guidance, Navigation, and Control Conference, Hilton Head, SC , 2007
work page 2007
- [26]
-
[27]
N. Cao and A.F. Lynch. Inner-outer loop control of a quadrotor UA Vs with input and state constraints. IEEE Transactions on Control Systems Technology, pages 1797–1804, 2016
work page 2016
-
[28]
N. Fischer, D. Hughes, P. Walters, E. Schwartz, and W. Dixon. Nonlinear rise-based control of an autonomous underwater vehicle. IEEE Transactions on Robotics , 2014
work page 2014
-
[29]
Spatio-Temporal Wind Modeling for UAV Simulations
K. Cole and A. Wickenhesier. Spatio-temporal wind modeling for UA V simulations. http://arxiv.org/abs/1905.09954, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1905
- [30]
-
[31]
E. Branlard. Wind energy: On the statistics of gusts and their propagation through a wind farm. ECN-Wind-Memo-09-005, 2009. 16 Kenan Cole Kenan Cole received her B.S., M.S., and Ph.D. degrees in mechanical engineering from The George Washington University, Washington, DC, USA, in 2007, 2011, and 2018, respectively. Her research interests include vehicle c...
work page 2009
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.