On Relevant Equilibria in Reachability Games
Pith reviewed 2026-05-24 22:36 UTC · model grok-4.3
The pith
Reachability games admit relevant equilibria such as Pareto optimal Nash equilibria whose existence and properties can be decided with specific complexity results.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In finite reachability games, relevant equilibria are defined via Pareto optimality or social-welfare maximization applied to Nash and subgame-perfect equilibria; the associated decision problems of existence, verification, and optimization admit precise complexity classifications.
What carries the argument
Relevant equilibria obtained by imposing Pareto optimality or social-welfare maximality on the set of Nash equilibria and subgame-perfect equilibria of a reachability game.
If this is right
- If a Pareto-optimal equilibrium exists, no player can be made better off without making another player worse off.
- Equilibria with maximal social welfare guarantee that the largest possible number of players reach their targets simultaneously.
- Decision procedures for these notions allow algorithmic selection among coexisting equilibria rather than arbitrary choice.
- The same complexity landscape applies to both Nash equilibria and their subgame-perfect refinements.
Where Pith is reading between the lines
- The complexity results could be used to compare the computational cost of relevant equilibria across different graph classes or objective types.
- Implementation of the decision procedures might support automated synthesis of strategies in multi-agent systems where targets represent safety or reachability goals.
- Extending the same relevance filters to infinite games or to objectives beyond reachability would test whether the complexity pattern persists.
Load-bearing premise
That the known existence of ordinary Nash and subgame-perfect equilibria carries over without change to the restricted classes of relevant equilibria.
What would settle it
A concrete finite graph with target sets for which an algorithm decides the existence of a Pareto-optimal Nash equilibrium in time or space outside the complexity class established by the paper.
Figures
read the original abstract
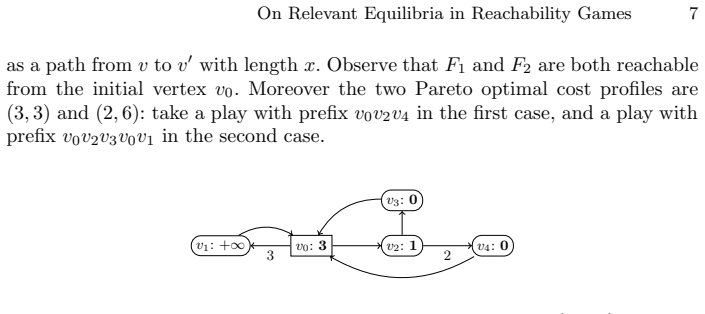
We study multiplayer reachability games played on a finite directed graph equipped with target sets, one for each player. In those reachability games, it is known that there always exists a Nash equilibrium (NE) and a subgame perfect equilibrium (SPE). But sometimes several equilibria may coexist such that in one equilibrium no player reaches his target set whereas in another one several players reach it. It is thus very natural to identify "relevant" equilibria. In this paper, we consider different notions of relevant equilibria including Pareto optimal equilibria and equilibria with high social welfare. We provide complexity results for various related decision problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
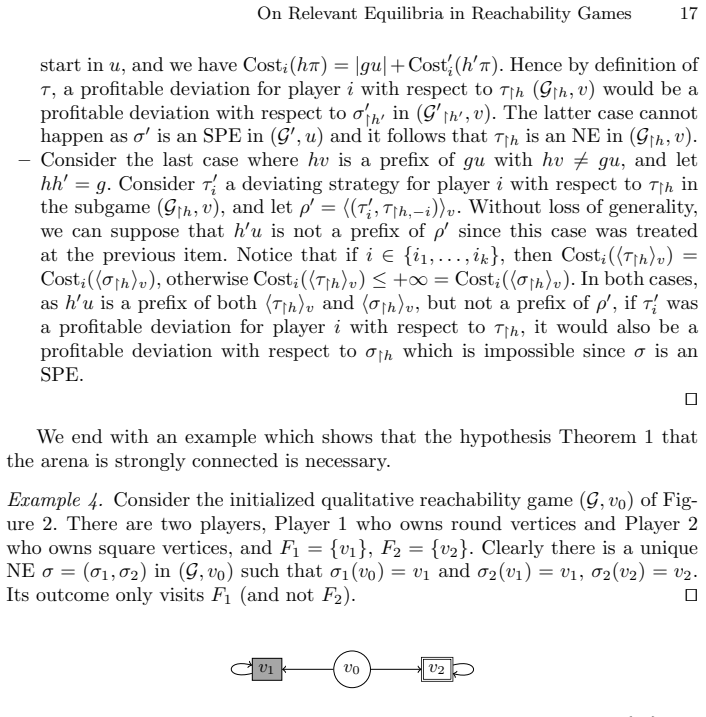
Summary. The manuscript studies multiplayer reachability games on finite directed graphs with one target set per player. It recalls that Nash equilibria (NE) and subgame-perfect equilibria (SPE) always exist, observes that multiple equilibria may coexist with differing reachability outcomes (some players reach their targets in one equilibrium but not in another), introduces notions of relevant equilibria (including Pareto-optimal equilibria and equilibria maximizing social welfare), and establishes complexity results for associated decision problems.
Significance. If the complexity classifications hold, the results would be a useful contribution to algorithmic game theory on graphs. They extend the known existence of NE and SPE by addressing the computational problem of selecting among equilibria according to relevance criteria, which is relevant for multi-agent verification and synthesis applications.
minor comments (2)
- [Abstract] Abstract: the phrase 'various related decision problems' is vague; a brief enumeration of the exact decision problems (e.g., existence of a Pareto-optimal NE in which k players reach their targets) would improve clarity.
- The manuscript should explicitly state the input encoding (graph size, target sets) used for the complexity results to make the PSPACE / NP bounds fully precise.
Simulated Author's Rebuttal
We thank the referee for the careful summary of our work and the recommendation for minor revision. No specific major comments were raised in the report.
Circularity Check
No significant circularity
full rationale
The paper's central results are complexity classifications for decision problems on formally defined notions of relevant equilibria (Pareto-optimal, high social welfare, etc.) in finite reachability games. These decision problems are well-defined directly from the input graph, target sets, and equilibrium concepts without any reduction to fitted parameters, self-referential definitions, or load-bearing self-citations. The background fact that NE and SPE exist is invoked only motivationally and is treated as an external known result; the new work does not derive existence or any quantitative prediction from its own inputs. No step in the derivation chain matches any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Finite directed graphs with per-player target sets admit Nash and subgame perfect equilibria
Reference graph
Works this paper leans on
-
[1]
Bouyer, P., Markey, N., Stan, D.: Mixed Nash equilibria in concurrent terminal- reward games. In: 34th International Conference on Foundat ion of Software Tech- nology and Theoretical Computer Science, FSTTCS 2014, Dece mber 15-17, 2014, New Delhi, India. pp. 351–363 (2014)
work page 2014
-
[2]
Brenguier, R., Raskin, J.: Pareto curves of multidimensi onal mean-payoff games. In: CA V (2). Lecture Notes in Computer Science, vol. 9207, pp . 251–267. Springer (2015)
work page 2015
-
[3]
Logical Methods in Computer S cience 9(1) (2012)
Brihaye, T., Bruy` ere, V., De Pril, J., Gimbert, H.: On sub game perfection in quan- titative reachability games. Logical Methods in Computer S cience 9(1) (2012)
work page 2012
-
[4]
Brihaye, T., Bruy` ere, V., Goeminne, A., Raskin, J.: Cons trained existence prob- lem for weak subgame perfect equilibria with ω-regular boolean objectives. In: Proceedings Ninth International Symposium on Games, Autom ata, Logics, and Formal Verification, GandALF 2018, Saarbr¨ ucken, Germany, 26-28th September
work page 2018
-
[5]
Brihaye, T., Bruy` ere, V., Goeminne, A., Raskin, J., van d en Bogaard, M.: The complexity of subgame perfect equilibria in quantitative r eachability games. To appear CONCUR 2019
work page 2019
-
[6]
CoRR abs/1905.00784 (2019), http://arxiv.org/abs/1905.00784
Brihaye, T., Bruy` ere, V., Goeminne, A., Raskin, J., van d en Bogaard, M.: The complexity of subgame perfect equilibria in quantitative r eachability games. CoRR abs/1905.00784 (2019), http://arxiv.org/abs/1905.00784
-
[7]
Brihaye, T., De Pril, J., Schewe, S.: Multiplayer cost gam es with simple Nash equilibria. In: Logical Foundations of Computer Science, I nternational Sympo- sium, LFCS 2013, San Diego, CA, USA, January 6-8, 2013. Proce edings. pp. 59–73 (2013), https://doi.org/10.1007/978-3-642-35722-0_5
- [8]
-
[9]
Bruy` ere, V.: Computer aided synthesis: A game-theoreti c approach. In: Devel- opments in Language Theory - 21st International Conference , DLT 2017, Li` ege, Belgium, August 7-11, 2017, Proceedings. pp. 3–35 (2017)
work page 2017
-
[10]
: The Complexity of Rational Synthesis
Condurache, R., Filiot, E., Gentilini, R., Raskin, J.F. : The Complexity of Rational Synthesis. In: Chatzigiannakis, I., Mitzenmacher, M., Rab ani, Y., Sangiorgi, D. (eds.) 43rd International Colloquium on Automata, Languag es, and Programming (ICALP 2016). Leibniz International Proceedings in Inform atics (LIPIcs), vol. 55, pp. 121:1–121:15. Schloss Dags...
work page 2016
-
[11]
CoRR cs.GT/0205074 (2002), http://arxiv.org/abs/cs.GT/0205074
Conitzer, V., Sandholm, T.: Complexity results about Na sh equilibria. CoRR cs.GT/0205074 (2002), http://arxiv.org/abs/cs.GT/0205074
-
[12]
Haddad, A.: Characterising Nash equilibria outcomes in fully informed concurrent games, available at http://web1.ulb.ac.be/di/verif/had dad/H16.pdf
-
[13]
Theory of Computing Systems 43(2), 204–233 (Aug 2008)
Khachiyan, L., Boros, E., Borys, K., Elbassioni, K., Gur vich, V., Rudolf, G., Zhao, J.: On short paths interdiction problems: Total and node-wi se limited interdiction. Theory of Computing Systems 43(2), 204–233 (Aug 2008)
work page 2008
- [14]
- [15]
- [16]
- [17]
-
[18]
Thomas, W.: On the synthesis of strategies in infinite gam es. In: Mayr, E.W., Puech, C. (eds.) STACS 95. pp. 1–13. Springer Berlin Heidelb erg, Berlin, Heidel- berg (1995)
work page 1995
-
[19]
Ummels, M.: Rational behaviour and strategy constructi on in infinite multiplayer games. In: FSTTCS. Lecture Notes in Computer Science, vol. 4 337, pp. 212–223. Springer (2006)
work page 2006
-
[20]
Ummels, M.: The complexity of Nash equilibria in infinite multiplayer games. In: Foundations of Software Science and Computational Structu res, 11th International Conference, FOSSACS 2008, Held as Part of the Joint European Conferences on Theory and Practice of Software, ETAPS 2008, Budapest, Hung ary, March 29 - April 6, 2008. Proceedings. pp. 20–34 (2008...
work page 2008
-
[21]
There exists an SPE with cost profile c in (X, (v0,I 0)); 24 T. Brihaye et al
-
[22]
Λ ∗ (v,I ) = {ρ ∈ PlaysX (v,I ) | ρ is λ ∗ -consistent} ̸ = ∅ for all (v,I ) ∈ Succ∗ (v0,I 0) and there exists ρ ∈ Λ ∗(v0,I 0) such that (Costi(ρ))i∈Π =c
-
[23]
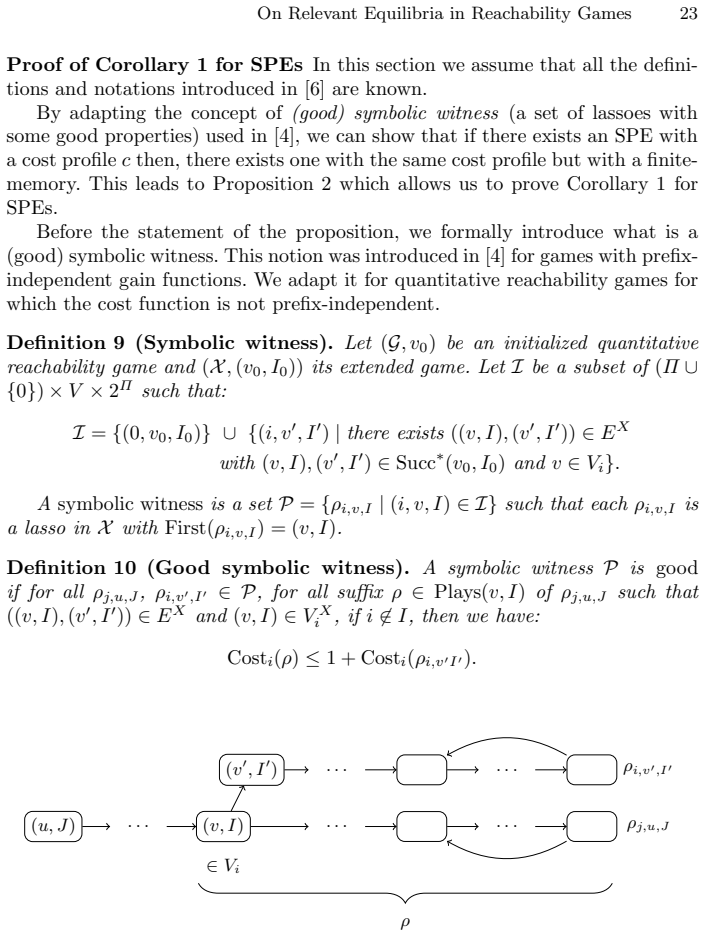
Moreover, for each ρi,v,I ∈ P , |ρi,v,I | ≤ O(|V |(|Π |+1)·(|Π |+|V |)) + (|Π |+ 1) · |V |
There exists a good symbolic witness P that contains a lasso ρ0,v 0,I 0 with cost profile c and |ρ0,v 0,I 0 | ≤ M + |V |. Moreover, for each ρi,v,I ∈ P , |ρi,v,I | ≤ O(|V |(|Π |+1)·(|Π |+|V |)) + (|Π |+ 1) · |V |
-
[24]
There exists a finite-memory SPE σ with cost profile c in (X, (v0,I 0)) such that its memory is in O(M + 2|Π | · |Π | · |V |(|Π |+1)·(|Π |+|V |)+1). To obtain the bound on the length of the lassoes, we use the following lemma. Lemma 4 ([6]). Let v be a vertex in the extended game, let MaxCosti(v) = max{Costi(ρ) |ρ ∈ Plays(v) and ρ is λ ∗ -consistent}. If Ma...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.