Speeding Up Iterative Closest Point Using Stochastic Gradient Descent
Pith reviewed 2026-05-24 18:23 UTC · model grok-4.3
The pith
Stochastic gradient descent solves the ICP optimization problem to reach accurate point cloud alignments faster than standard solvers.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
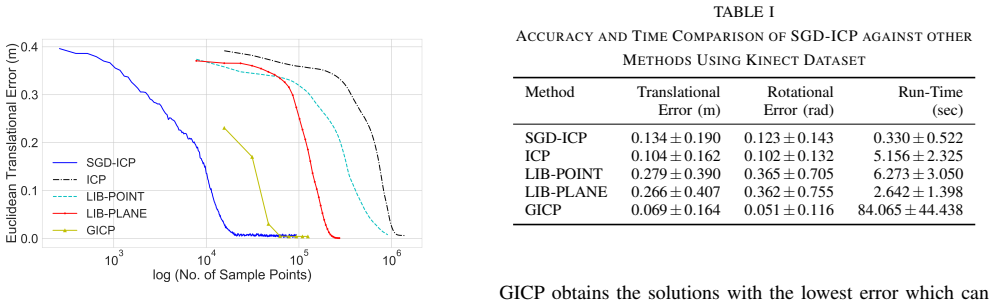
The paper claims that applying stochastic gradient descent to the ICP objective improves convergence speed without sacrificing solution quality. Experiments using Kinect and Velodyne data confirm that the proposed method is faster than existing ICP variants while obtaining comparable alignments, with an added benefit of greater robustness to parameter choices when data come from different sensors.
What carries the argument
Stochastic gradient descent applied directly to the ICP point correspondence error objective.
If this is right
- The SGD formulation converges in fewer iterations than standard ICP solvers.
- Final alignment accuracy remains comparable to conventional ICP on real sensor data.
- The approach exhibits reduced sensitivity to parameter settings across Kinect and Velodyne datasets.
Where Pith is reading between the lines
- The method could allow ICP to be used in tighter real-time loops inside SLAM pipelines where iteration count directly limits frame rate.
- Because SGD naturally handles noisy gradients, the same substitution might improve robustness when ICP is applied to sparse or partially overlapping clouds.
- The formulation might be combined with modern robust kernels or learned feature matching without changing the core SGD loop.
Load-bearing premise
The non-convex ICP objective can be optimized reliably by SGD without introducing new local minima or instability that standard ICP solvers avoid.
What would settle it
A direct comparison on identical point-cloud pairs in which the SGD version consistently produces higher final alignment error or fails to reach solutions of similar quality to deterministic ICP.
Figures
read the original abstract
Sensors producing 3D point clouds such as 3D laser scanners and RGB-D cameras are widely used in robotics, be it for autonomous driving or manipulation. Aligning point clouds produced by these sensors is a vital component in such applications to perform tasks such as model registration, pose estimation, and SLAM. Iterative closest point (ICP) is the most widely used method for this task, due to its simplicity and efficiency. In this paper we propose a novel method which solves the optimisation problem posed by ICP using stochastic gradient descent (SGD). Using SGD allows us to improve the convergence speed of ICP without sacrificing solution quality. Experiments using Kinect as well as Velodyne data show that, our proposed method is faster than existing methods, while obtaining solutions comparable to standard ICP. An additional benefit is robustness to parameters when processing data from different sensors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that solving the ICP optimization problem via stochastic gradient descent (SGD) improves convergence speed without sacrificing solution quality relative to standard ICP, with supporting experiments on Kinect and Velodyne data demonstrating faster performance, comparable solutions, and greater parameter robustness across sensors.
Significance. If the central claim holds, the method could provide a practical speed-up for point-cloud registration in robotics applications such as SLAM and pose estimation. The approach is noteworthy for attempting to apply SGD directly to the non-convex ICP objective (pose parameters plus correspondence updates) rather than relying solely on alternating closed-form rigid transforms.
major comments (2)
- [Abstract] Abstract: the claim that SGD yields 'solutions comparable to standard ICP' is load-bearing for the central contribution, yet the text provides no explicit comparison of final residual distributions, failure rates, or error metrics (point-to-point vs. point-to-plane) under matched initializations, leaving the assumption that SGD avoids inferior local minima untested.
- [Abstract] Abstract: no equations, objective function, or derivation is shown for how the 6-DoF pose is optimized by SGD while handling correspondence updates, preventing assessment of whether the stochastic gradient estimates preserve the monotonic descent property of standard ICP's SVD/quaternion steps.
minor comments (1)
- The abstract refers to 'existing methods' without naming the baselines (e.g., standard ICP, Go-ICP, or others) used for speed and quality comparisons.
Simulated Author's Rebuttal
We thank the referee for their thoughtful and constructive comments on our manuscript. We address each major comment below, indicating where we agree that revisions are warranted to strengthen the presentation of our results.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that SGD yields 'solutions comparable to standard ICP' is load-bearing for the central contribution, yet the text provides no explicit comparison of final residual distributions, failure rates, or error metrics (point-to-point vs. point-to-plane) under matched initializations, leaving the assumption that SGD avoids inferior local minima untested.
Authors: We agree that more explicit quantitative support is needed for the claim of comparable solution quality. The experiments section reports average final alignment errors and success rates on Kinect and Velodyne datasets under varied initializations, indicating performance comparable to standard ICP. However, we did not include detailed residual distribution histograms, failure rate breakdowns, or direct point-to-point vs. point-to-plane metric comparisons. We will revise the manuscript to add these analyses and figures to more rigorously test whether SGD-ICP avoids inferior local minima. revision: yes
-
Referee: [Abstract] Abstract: no equations, objective function, or derivation is shown for how the 6-DoF pose is optimized by SGD while handling correspondence updates, preventing assessment of whether the stochastic gradient estimates preserve the monotonic descent property of standard ICP's SVD/quaternion steps.
Authors: The abstract is a high-level summary and conventionally omits equations. The full manuscript (Section 3) defines the ICP objective, describes the 6-DoF parameterization, and explains the stochastic gradient computation with iterative correspondence updates. That said, we acknowledge the value of a more explicit derivation addressing monotonic descent properties. We will expand the methods section with additional equations and discussion of the stochastic approximation in the revision. revision: yes
Circularity Check
No circularity: empirical validation of SGD-ICP with no self-referential derivations
full rationale
The paper presents an algorithmic proposal to replace standard ICP's alternating closed-form solves with direct SGD on the 6-DoF pose, then reports wall-clock speedups and comparable final alignment quality on Kinect and Velodyne point clouds. No equations, uniqueness theorems, or parameter fits are shown that would make any claimed improvement equivalent to its own inputs by construction. The central result is an empirical performance comparison rather than a derived identity or self-cited premise, so the derivation chain is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
M. Avriel. Nonlinear Programming: Analysis and Methods . Courier Corporation, 2003
work page 2003
-
[2]
P. Besl and N.D. McKay. Method for registration of 3-d shapes. In Sensor Fusion IV: Control Paradigms and Data Structures , 1992
work page 1992
-
[3]
G. Blais and M.D. Levine. Registering multiview range data to create 3D computer objects. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1995
work page 1995
-
[4]
L. Bottou, F.E. Curtis, and J. Nocedal. Optimization methods for large-scale machine learning. SIAM Review, 2018
work page 2018
-
[5]
Y . Chen and G. Medioni. Object modeling by registration of multiple range images. In Proceedings of IEEE International Conference on Robotics and Automation , 1991
work page 1991
-
[6]
D. Chetverikov, D. Svirko, D. Stepanov, and P. Krsek. The trimmed iterative closest point algorithm. International Conference on Pattern Recognition, 2002
work page 2002
-
[7]
A. Fitzgibbon. Robust registration of 2D and 3D point sets. Image and Vision Computing , 2003
work page 2003
- [8]
-
[9]
D. Kingma and B. Adam. A method for stochastic optimization. In International Conference on Learning Representations , 2015
work page 2015
-
[10]
J. Luck, C. Little, and W. Hoff. Registration of range data using a hybrid simulated annealing and iterative closest point algorithm. In IEEE International Conference on Robotics and Automation , 2000
work page 2000
-
[11]
T. Masuda and N. Yokoya. Robust method for registration and segmentation of multiple range images. Computer Vision and Image Understanding, 1995
work page 1995
-
[12]
T. Pajdla and L.V . Gool. Matching of 3-D curves using semi- differential invariants. Proceedings of the IEEE International Con- ference on Computer Vision , 1995
work page 1995
-
[13]
F. Pomerleau, F. Colas, and R. Siegwart. A review of point cloud registration algorithms for mobile robotics. Foundations and Trends in Robotics, 2015
work page 2015
-
[14]
F. Pomerleau, S. Magnenat, F. Colas, M. Liu, and R. Siegwart. Tracking a depth camera: Parameter exploration for fast ICP. IEEE International Conference on Intelligent Robots and Systems , 2011
work page 2011
-
[15]
W Press, S. Teukolsky, W. Vetterling, and B. Flannery. Numerical Recipes in C: The Art of Scientific Computing . Cambridge University Press, 2nd edition, 1992
work page 1992
-
[16]
S. Rusinkiewicz and M. Levoy. Efficient variants of the ICP algorithm. Proceedings of the International Conference on 3-D Digital Imaging and Modeling, 2001
work page 2001
-
[17]
R.B Rusu and S. Cousins. 3D is here: Point Cloud Library (PCL). In IEEE International Conference on Robotics and Automation , 2011
work page 2011
- [18]
- [19]
-
[20]
R. Srivatsan, G. Rosen, F. Naina, D. Mohamed, and H. Choset. Esti- mating SE(3) elements using a dual quaternion based linear Kalman filter. Robotics: Science and Systems , 2016
work page 2016
-
[21]
R. A. Srivatsan, M. Xu, N. Zevallos, and H. Choset. Bingham distribution-based linear filter for online pose estimation. In Robotics: Science and Systems , 2017
work page 2017
-
[22]
T. Zinsser, J. Schmidt, and H. Niemann. A refined ICP algorithm for robust 3-D correspondence estimation. Proceedings of the Interna- tional Conference on Image Processing , 2003
work page 2003
discussion (0)
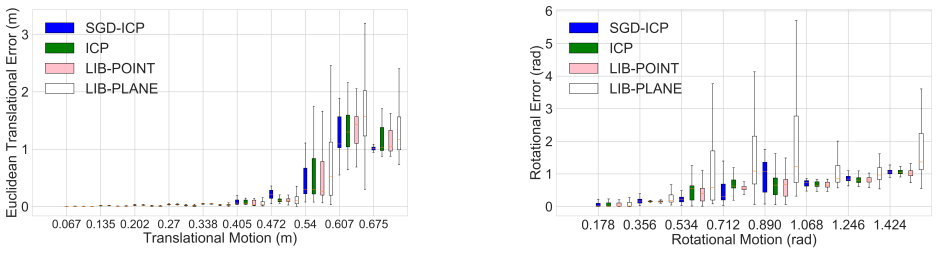
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.