Estimating the Diameter at Breast Height of Trees in a Forest from RGB
Pith reviewed 2026-05-22 17:28 UTC · model grok-4.3
The pith
A consumer 360-degree video camera can estimate tree diameters at breast height to within 5-9 percent median error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a semi-automated pipeline using SfM photogrammetry on consumer 360 video, projection of Grounded Segment Anything masks onto the resulting point cloud for trunk segmentation, and RANSAC-based cross-section fitting produces DBH estimates with median absolute relative errors of 5-9 percent on 61 acquisitions of 43 trees under varied conditions. This performance sits only 2-4 percent above LiDAR results while requiring far lower cost, simpler setup, and widely available hardware.
What carries the argument
Projection of 2D Grounded Segment Anything masks from video frames onto an SfM point cloud to isolate trunks, followed by RANSAC fitting of cross-section shape and diameter.
If this is right
- Forest inventories can shift from LiDAR to single-camera video walks for routine DBH collection.
- Carbon accounting and ecological monitoring become feasible in settings without access to specialized equipment.
- An interactive viewer allows quick visual checks of segmented trunks and fitted diameters.
- Minimal setup supports repeated acquisitions across seasons or after disturbances with low operational overhead.
Where Pith is reading between the lines
- Video transects through a stand could replace discrete single-tree samples for denser inventory coverage.
- Mobile-phone versions might let field crews or volunteers collect usable data without dedicated 360 hardware.
- Occlusion handling could be strengthened by fusing multiple walking paths around the same tree.
Load-bearing premise
Projecting 2D semantic masks onto the 3D point cloud yields accurate enough trunk segmentation and cross-section geometry despite real forest occlusion and lighting changes.
What would settle it
New measurements on trees with dense understory where the SfM cloud shows large gaps in the trunk region or the projected masks cut across branches, producing DBH errors above 15 percent relative to manual calipers.
Figures



read the original abstract
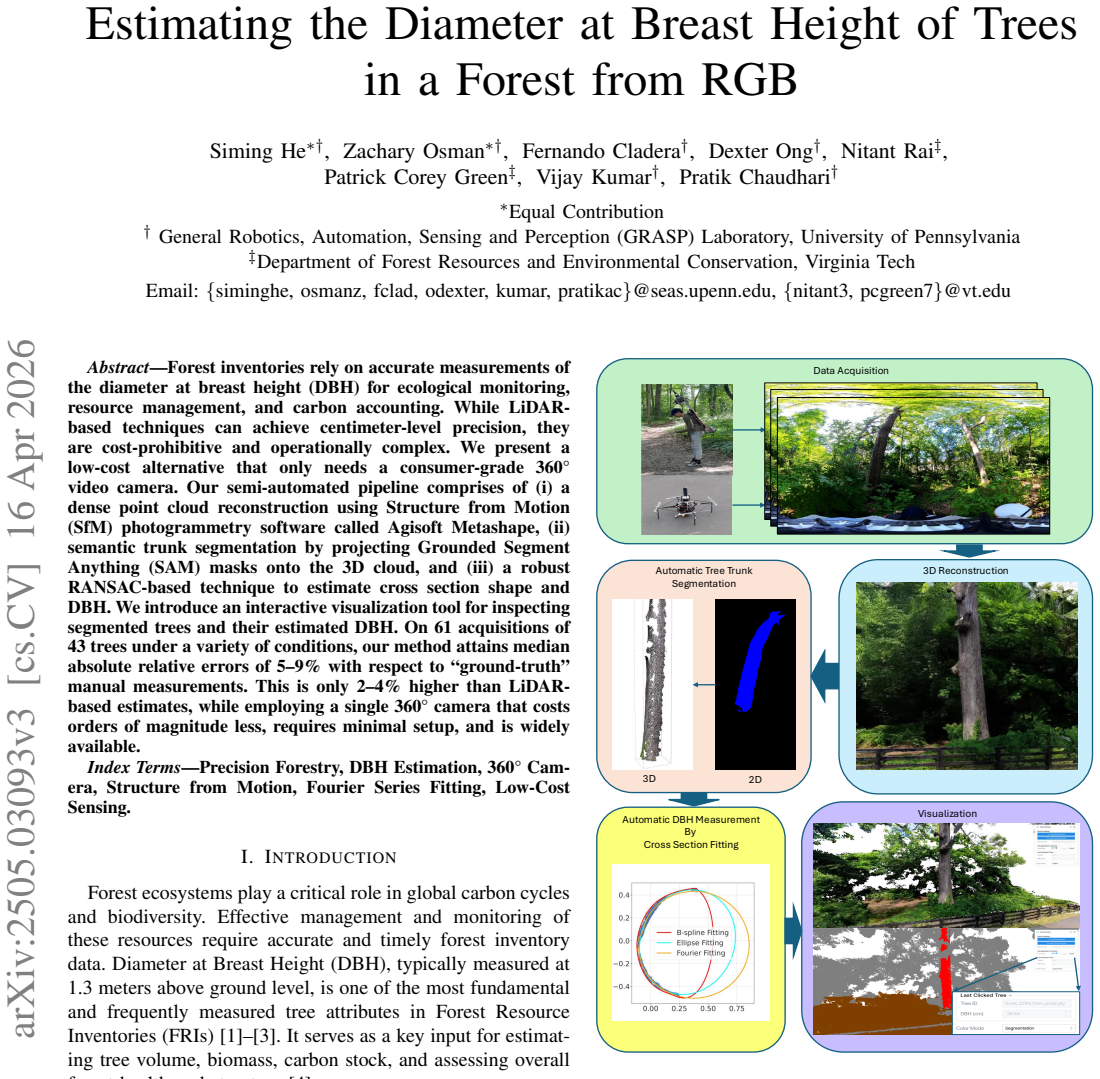
Forest inventories rely on accurate measurements of the diameter at breast height (DBH) for ecological monitoring, resource management, and carbon accounting. While LiDAR-based techniques can achieve centimeter-level precision, they are cost-prohibitive and operationally complex. We present a low-cost alternative that only needs a consumer-grade 360 video camera. Our semi-automated pipeline comprises of (i) a dense point cloud reconstruction using Structure from Motion (SfM) photogrammetry software called Agisoft Metashape, (ii) semantic trunk segmentation by projecting Grounded Segment Anything (SAM) masks onto the 3D cloud, and (iii) a robust RANSAC-based technique to estimate cross section shape and DBH. We introduce an interactive visualization tool for inspecting segmented trees and their estimated DBH. On 61 acquisitions of 43 trees under a variety of conditions, our method attains median absolute relative errors of 5-9% with respect to "ground-truth" manual measurements. This is only 2-4% higher than LiDAR-based estimates, while employing a single 360 camera that costs orders of magnitude less, requires minimal setup, and is widely available.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a semi-automated pipeline for estimating tree diameter at breast height (DBH) from RGB video captured with a consumer-grade 360 camera. The method reconstructs a dense point cloud using Structure from Motion (SfM) in Agisoft Metashape, performs semantic trunk segmentation by projecting Grounded Segment Anything (SAM) masks from 2D video frames onto the 3D cloud, and applies a RANSAC-based fit to estimate cross-section shape and DBH. On 61 acquisitions of 43 trees under varied conditions, it reports median absolute relative errors of 5-9% versus manual measurements, only 2-4% higher than LiDAR estimates, while emphasizing low cost and minimal setup.
Significance. If the accuracy claims are substantiated with fuller validation, the work offers a practical low-cost alternative to LiDAR for forest inventories, supporting ecological monitoring and carbon accounting with widely available hardware. The inclusion of an interactive visualization tool for inspecting segmentations and DBH estimates is a useful contribution for practical deployment. The empirical focus on real forest scenes strengthens applicability, though the significance hinges on addressing gaps in quantitative validation of intermediate steps.
major comments (2)
- [Abstract] Abstract: the headline performance claim of median absolute relative errors of 5-9% on 61 acquisitions of 43 trees is presented without details on tree selection criteria, error bars, statistical tests, or explicit handling of occlusions and variable illumination, which are load-bearing for assessing whether the method is robust relative to LiDAR.
- [Methods (trunk segmentation step)] Methods (trunk segmentation step): projecting Grounded SAM 2D masks onto the SfM point cloud is central to obtaining accurate 3D trunk geometry for the subsequent RANSAC cross-section fit, yet no isolating quantitative metric (such as 3D IoU or boundary error versus manual trunk labeling) is reported to evaluate performance under forest self-occlusion and sparse point clouds at breast height.
minor comments (2)
- [Abstract] Abstract: the phrase 'ground-truth' in quotes for manual measurements should be clarified to indicate it refers to tape-based field measurements.
- [Overall] Overall: additional figures showing example point-cloud segmentations, RANSAC fits, and failure cases under occlusion would improve clarity of the pipeline.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback, which identifies opportunities to strengthen the clarity and validation of our results. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline performance claim of median absolute relative errors of 5-9% on 61 acquisitions of 43 trees is presented without details on tree selection criteria, error bars, statistical tests, or explicit handling of occlusions and variable illumination, which are load-bearing for assessing whether the method is robust relative to LiDAR.
Authors: We agree that the abstract would benefit from additional context to support the performance claims. In the revised manuscript we will expand the abstract with a concise clause noting that the 43 trees were selected across a mixed forest stand to include variation in diameter, species, and canopy conditions, that results are reported as medians with interquartile ranges, and that the dataset encompasses scenes with differing occlusion levels and illumination. The direct numerical comparison to LiDAR (2-4% higher error) and associated statistical details remain in the results section and supplementary material; the abstract revision will simply signpost these elements for readers. revision: yes
-
Referee: [Methods (trunk segmentation step)] Methods (trunk segmentation step): projecting Grounded SAM 2D masks onto the SfM point cloud is central to obtaining accurate 3D trunk geometry for the subsequent RANSAC cross-section fit, yet no isolating quantitative metric (such as 3D IoU or boundary error versus manual trunk labeling) is reported to evaluate performance under forest self-occlusion and sparse point clouds at breast height.
Authors: We concur that an isolated quantitative assessment of the 3D segmentation step would be informative. However, the original study did not generate manual 3D trunk labels, making metrics such as 3D IoU infeasible without substantial new annotation effort. The end-to-end DBH accuracy serves as the primary validation, as segmentation errors would directly degrade the RANSAC fit. In revision we will add a dedicated paragraph in the discussion that qualitatively analyzes segmentation behavior under heavy occlusion and sparse breast-height points, supported by additional example visualizations, and we will explicitly discuss how these factors influence final DBH error. revision: partial
Circularity Check
No circularity: empirical pipeline with external validation
full rationale
The paper presents a measurement pipeline (SfM reconstruction via Agisoft Metashape, projection of Grounded SAM 2D masks onto the point cloud, followed by RANSAC cross-section fitting) and reports empirical median relative errors of 5-9% against manual ground-truth and LiDAR on 61 acquisitions. No equations, fitted parameters, or derivations are described that reduce the target DBH quantity to the inputs by construction. All load-bearing steps rely on standard external tools and direct comparison to independent measurements rather than self-referential definitions or self-citations.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Method and device for measuring the diameter at breast height and location of trees in sample plots,
S. Li, X. Chen, Y . Sun, C. Lv, F. Yuan, and L. Fang, “Method and device for measuring the diameter at breast height and location of trees in sample plots,”Forests, vol. 14, no. 9, 2023. [Online]. Available: https://www.mdpi.com/1999-4907/14/9/1723
work page 2023
-
[2]
A. S ¸ahin, A. Kahriman, and A. G ¨okt¨urk, “Estimating diameter at breast height (dbh) from diameter at stump height (dst) in triple mixed stands in the region of artvin in turkey,”Forestist, vol. 69, pp. 61–67, 01 2019
work page 2019
-
[3]
Y . Wu, X. Gan, Y . Zhou, and X. Yuan, “Estimation of diameter at breast height in tropical forests based on terrestrial laser scanning and shape diameter function,”Sustainability, vol. 16, no. 6, p. 2275, 2024. [Online]. Available: https://www.mdpi.com/2071-1050/16/6/2275
work page 2024
-
[4]
Distribution of biomass dynamics in relation to tree size in forests across the world,
C. Piponiot, K. J. Anderson-Teixeira, S. J. Davies, D. Allen, N. A. Bourg, D. F. R. P. Burslem, D. C ´ardenas, C.-H. Chang-Yang, G. Chuyong, S. Cordell, H. S. Dattaraja, A. Duque, S. Ediriweera, C. Ewango, Z. Ezedin, J. Filip, C. P. Giardina, R. Howe, C.-F. Hsieh, S. P. Hubbell, F. M. Inman-Narahari, A. Itoh, D. Jan ´ık, D. Kenfack, K. Kr´al, J. A. Lutz, ...
-
[5]
Sustainable and precision agriculture with the internet of everything (ioe),
A. Z. Babar and O. B. Akan, “Sustainable and precision agriculture with the internet of everything (ioe),” 2025. [Online]. Available: https://arxiv.org/abs/2404.06341
-
[6]
M. Sharma and R. Pujari, “Precision forestry: Integration of robotics and sensing technologies for tree measurement and monitoring section a-research paper issn 2063-5346 4747 eur,” vol. 12, pp. 4747–4764, 06 2023
work page 2063
-
[7]
Autonomous forest inventory with legged robots: System design and field deployment,
M. Mattamala, N. Chebrolu, B. Casseau, L. Freißmuth, J. Frey, T. Tuna, M. Hutter, and M. Fallon, “Autonomous forest inventory with legged robots: System design and field deployment,” 2024. [Online]. Available: https://arxiv.org/abs/2404.14157
-
[8]
Towards autonomous photogrammetric forest inventory using a lightweight under-canopy robotic drone,
V . Karjalainen, N. Koivum ¨aki, T. Hakala, J. Muhojoki, E. Hyypp ¨a, A. George, J. Suomalainen, and E. Honkavaara, “Towards autonomous photogrammetric forest inventory using a lightweight under-canopy robotic drone,” 2025. [Online]. Available: https://arxiv.org/abs/2501. 12073
work page 2025
-
[9]
Assessing the accuracy of tree diameter measurements collected at a distance,
S. Weaver, Z. Ucar, P. Bettinger, K. Merry, K. Faw, and C. Cieszewski, “Assessing the accuracy of tree diameter measurements collected at a distance,”Croatian Journal of Forest Engineering, vol. 36, pp. 73–83, 02 2015
work page 2015
-
[10]
L. Sun, Z. Feng, Y . Shao, L. Wang, J. Su, T. Ma, D. Lu, J. An, Y . Pang, S. Fahad, W. Wang, and Z. Wang, “The development of a set of novel low cost and data processing-free measuring instruments for tree diameter at breast height and tree position,”Forests, vol. 14, no. 5,
-
[11]
Available: https://www.mdpi.com/1999-4907/14/5/891
[Online]. Available: https://www.mdpi.com/1999-4907/14/5/891
work page 1999
-
[12]
C. Song, B. Yang, L. Zhanget al., “A handheld device for measuring the diameter at breast height of individual trees using laser ranging and deep-learning based image recognition,”Plant Methods, vol. 17, p. 67,
-
[13]
Available: https://doi.org/10.1186/s13007-021-00748-z
[Online]. Available: https://doi.org/10.1186/s13007-021-00748-z
-
[14]
S. Gao, Z. Zhang, and L. Cao, “Individual tree structural parameter extraction and volume table creation based on near-field lidar data: A case study in a subtropical planted forest,”Sensors (Basel), vol. 21, no. 23, p. 8162, 2021. [Online]. Available: https://doi.org/10.3390/s21238162
-
[15]
Extracting diameter at breast height with a handheld mobile lidar system in an outdoor environment,
S. Zhou, F. Kang, W. Li, J. Kan, Y . Zheng, and G. He, “Extracting diameter at breast height with a handheld mobile lidar system in an outdoor environment,”Sensors (Basel), vol. 19, no. 14, p. 3212, 2019. [Online]. Available: https://doi.org/10.3390/s19143212
-
[16]
Uptake and barriers to the use of geospatial technologies in forest management,
J. Morgenroth and R. Visser, “Uptake and barriers to the use of geospatial technologies in forest management,”New Zealand Journal of Forestry Science, vol. 43, pp. 16–24, 12 2013
work page 2013
-
[17]
J. Stoddart, J. Suarez, W. Masonet al., “Continuous cover forestry and remote sensing: A review of knowledge gaps, challenges, and potential directions,”Current Forestry Reports, vol. 9, pp. 490–501,
-
[18]
Available: https://doi.org/10.1007/s40725-023-00206-0
[Online]. Available: https://doi.org/10.1007/s40725-023-00206-0
-
[19]
3d structure from 2d dimensional images using structure from motion algorithms,
I. Elkhrachy, “3d structure from 2d dimensional images using structure from motion algorithms,”Sustainability, vol. 14, no. 9, 2022. [Online]. Available: https://www.mdpi.com/2071-1050/14/9/5399
work page 2022
-
[20]
K. Itakura and F. Hosoi, “Automatic tree detection from three- dimensional images reconstructed from 360° spherical camera using yolo v2,”Remote Sensing, vol. 12, no. 6, 2020. [Online]. Available: https://www.mdpi.com/2072-4292/12/6/988
work page 2020
-
[21]
Quality analysis of 3d point cloud using low-cost spherical camera for underpass mapping,
S. Rezaei, A. Maier, and H. Arefi, “Quality analysis of 3d point cloud using low-cost spherical camera for underpass mapping,”Sensors, vol. 24, no. 11, 2024. [Online]. Available: https://www.mdpi.com/1424- 8220/24/11/3534
work page 2024
-
[22]
Terrestrial structure from motion photogrammetry for deriving forest inventory data,
L. Piermattei, W. Karel, D. Wang, M. Wieser, M. Mokro ˇs, P. Surov ´y, M. Kore ˇn, J. Toma ˇst´ık, N. Pfeifer, and M. Hollaus, “Terrestrial structure from motion photogrammetry for deriving forest inventory data,”Remote Sensing, vol. 11, no. 8, 2019. [Online]. Available: https://www.mdpi.com/2072-4292/11/8/950
work page 2019
-
[23]
Automatic forest dbh measurement based on structure from motion photogrammetry,
Q. Gao and J. Kan, “Automatic forest dbh measurement based on structure from motion photogrammetry,”Remote Sensing, vol. 14, no. 9,
-
[24]
Available: https://www.mdpi.com/2072-4292/14/9/2064
[Online]. Available: https://www.mdpi.com/2072-4292/14/9/2064
work page 2072
-
[25]
Structure from motion photogrammetry in forestry: a review,
J. Iglhaut, C. Cabo, S. Pulitiet al., “Structure from motion photogrammetry in forestry: a review,”Current Forestry Reports, vol. 5, pp. 155–168, 2019. [Online]. Available: https://doi.org/10.1007/s40725- 019-00094-3
-
[26]
M. Jaud, S. Passot, P. Allemand, N. Le Dantec, P. Grandjean, and C. Delacourt, “Suggestions to limit geometric distortions in the reconstruction of linear coastal landforms by sfm photogrammetry with photoscan® and micmac® for uav surveys with restricted gcps pattern,”Drones, vol. 3, no. 1, 2019. [Online]. Available: https://www.mdpi.com/2504-446X/3/1/2
work page 2019
-
[27]
Grounded SAM: Assembling Open-World Models for Diverse Visual Tasks
T. Ren, S. Liu, A. Zeng, J. Lin, K. Li, H. Cao, J. Chen, X. Huang, Y . Chen, F. Yan, Z. Zeng, H. Zhang, F. Li, J. Yang, H. Li, Q. Jiang, and L. Zhang, “Grounded sam: Assembling open-world models for diverse visual tasks,” 2024. [Online]. Available: https://arxiv.org/abs/2401.14159
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[28]
Uavs for forestry: Metric-semantic mapping and diameter estimation with autonomous aerial robots,
A. Prabhu, X. Liu, I. Spasojevic, Y . Wu, Y . Shao, D. Ong, J. Lei, P. C. Green, P. Chaudhari, and V . Kumar, “Uavs for forestry: Metric-semantic mapping and diameter estimation with autonomous aerial robots,”Mechanical Systems and Signal Processing, vol. 208, p. 111050, 2024. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S088832...
work page 2024
-
[29]
Comparison of three tools for measuring tree diameter in stands of different age and tree size
E. Wilson, J. Murray, I. Ryding, and E. Mont, “Comparison of three tools for measuring tree diameter in stands of different age and tree size.”Quarterly Journal of Forestry, vol. 101, pp. 267–274, 07 2007
work page 2007
- [30]
-
[31]
Predicting diameter at breast height from total height and crown length,
Q. V . Cao and T. J. Dean, “Predicting diameter at breast height from total height and crown length,” inProceedings of the 15th Biennial Southern Silvicultural Research Conference, ser. e-Gen. Tech. Rep. SRS-GTR- 175, J. M. Guldin, Ed. Asheville, NC: U.S. Department of Agriculture, Forest Service, Southern Research Station, 2013, pp. 201–205
work page 2013
-
[32]
Diameter estimation based on lidar point clouds at stand level of loblolly pine plantations,
C. Talmage, Y . Weng, Y . Zhang, and J. Grogan, “Diameter estimation based on lidar point clouds at stand level of loblolly pine plantations,” inProceedings of the 22nd Biennial Southern Silvicultural Research Conference, ser. Gen. Tech. Rep. SRS-274, D. C. Bragg, B. P. Oswald, and N. E. Koerth, Eds. Asheville, NC: U.S. Department of Agriculture, Forest S...
-
[33]
An improved area-based approach for estimating plot-level tree dbh from airborne lidar data,
Z. Zhang, T. Wang, A. K. Skidmore, F. Cao, G. She, and L. Cao, “An improved area-based approach for estimating plot-level tree dbh from airborne lidar data,”Forest Ecosystems, vol. 10, p. 100089, 2023. [Online]. Available: https://www.sciencedirect.com/science/article/pii/ S2197562023000040
work page 2023
-
[34]
Terrestrial laser scanning in forest inventories,
X. Liang, V . Kankare, J. Hyypp ¨a, Y . Wang, A. Kukko, H. Haggr ´en, X. Yu, H. Kaartinen, A. Jaakkola, F. Guan, M. Holopainen, and M. Vastaranta, “Terrestrial laser scanning in forest inventories,” ISPRS Journal of Photogrammetry and Remote Sensing, vol. 115, pp. 63–77, 2016, theme issue ’State-of-the-art in photogrammetry, remote sensing and spatial inf...
work page 2016
-
[35]
Terrestrial laser scanning in forest ecology: Expanding the horizon,
K. Calders, J. Adams, J. Armston, H. Bartholomeus, S. Bauwens, L. P. Bentley, J. Chave, F. M. Danson, M. Demol, M. Disney, R. Gaulton, S. M. Krishna Moorthy, S. R. Levick, N. Saarinen, C. Schaaf, A. Stovall, L. Terryn, P. Wilkes, and H. Verbeeck, “Terrestrial laser scanning in forest ecology: Expanding the horizon,”Remote Sensing of Environment, vol. 251,...
work page 2020
-
[36]
Estimating tree diameter at breast height (dbh) using ipad pro lidar sensor in boreal forests,
M. Guenther, M. K. Heenkenda, B. Leblon, D. Morris, and J. F. and, “Estimating tree diameter at breast height (dbh) using ipad pro lidar sensor in boreal forests,”Canadian Journal of Remote Sensing, vol. 50, no. 1, p. 2295470, 2024. [Online]. Available: https://doi.org/10.1080/07038992.2023.2295470
-
[37]
N. Howie and A. De Stefano, “Measuring tree diameter using lidar equipped ipad: An evaluation of forestscanner and arboreal forest applications,”Forest Science, vol. 70, 05 2024
work page 2024
-
[38]
S. G ¨ulci, H. Yurtseven, A. O. Akay, and M. Akgul, “Measuring tree diameter using a lidar-equipped smartphone: a comparison of smartphone- and caliper-based dbh,”Environmental Monitoring and Assessment, vol. 195, no. 6, p. 678, 2023. [Online]. Available: https://doi.org/10.1007/s10661-023-11366-8
-
[39]
R. Magnuson, Y . Erfanifard, M. Kulicki, T. Gasica, E. Tangwa, M. Miel- carek, and K. Stere ´nczak, “Mobile devices in forest mensuration: A review of technologies and methods in single tree measurements,” Remote Sensing, vol. 16, p. 3570, 09 2024
work page 2024
-
[40]
Lidar data acquisition and processing for ecology applications,
I. Ciobotari, A. Pr ´ıncipe, M. A. Oliveira, and J. N. Silva, “Lidar data acquisition and processing for ecology applications,” 2024. [Online]. Available: https://arxiv.org/abs/2401.05891
-
[41]
M. Zeybek, “Semiautomatic diameter-at-breast-height extraction from structure-from-motion-based point clouds using a low-cost fisheye lens,”Forests, vol. 16, no. 3, 2025. [Online]. Available: https: //www.mdpi.com/1999-4907/16/3/439
work page 2025
-
[42]
M. Mokro ˇs, J. V ´yboˇsˇtok, A. Grzn ´arov´a, M. Bo ˇsela, V . ˇSebeˇn, and J. Merganiˇc, “Non-destructive monitoring of annual trunk increments by Accepted to the Novel Approaches for Precision Agriculture and Forestry with Autonomous Robots IEEE ICRA Workshop - 2025 terrestrial structure from motion photogrammetry,”PloS One, vol. 15, no. 3, p. e0230082, 2020
work page 2025
-
[43]
N. C. Swayze and W. T. Tinkham, “Application of unmanned aerial system structure from motion point cloud detected tree heights and stem diameters to model missing stem diameters,” MethodsX, vol. 9, p. 101729, 2022. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S2215016122001108
work page 2022
- [44]
-
[45]
Available: https://www.mdpi.com/2072-4292/10/1/13
[Online]. Available: https://www.mdpi.com/2072-4292/10/1/13
work page 2072
-
[46]
Rapid tree diameter computation with terrestrial stereoscopic photogrammetry,
N. J. Eliopoulos, Y . Shen, M. L. Nguyen, V . Arora, Y . Zhang, G. Shao, K. Woeste, and Y .-H. Lu, “Rapid tree diameter computation with terrestrial stereoscopic photogrammetry,”Journal of Forestry, vol. 118, no. 4, p. 355–361, Mar. 2020. [Online]. Available: http://dx.doi.org/10.1093/jofore/fvaa009
-
[47]
Quantifying the influence of surface texture and shape on structure from motion 3d reconstructions,
M. S. Nielsen, I. Nikolov, E. K. Kruse, J. Garnæs, and C. B. Madsen, “Quantifying the influence of surface texture and shape on structure from motion 3d reconstructions,”Sensors, vol. 23, no. 1,
-
[48]
Available: https://www.mdpi.com/1424-8220/23/1/178
[Online]. Available: https://www.mdpi.com/1424-8220/23/1/178
-
[49]
Q. Chen, X. Wang, M. Hang, and J. Li, “Research on the improvement of single tree segmentation algorithm based on airborne lidar point cloud,”Open Geosciences, vol. 13, no. 1, pp. 705–716, 2021. [Online]. Available: https://doi.org/10.1515/geo-2020-0266
-
[50]
Segmenting individual tree from tls point clouds using improved dbscan,
H. Fu, H. Li, Y . Dong, F. Xu, and F. Chen, “Segmenting individual tree from tls point clouds using improved dbscan,”Forests, vol. 13, no. 4,
-
[51]
Available: https://www.mdpi.com/1999-4907/13/4/566
[Online]. Available: https://www.mdpi.com/1999-4907/13/4/566
work page 1999
-
[52]
S. Li, S. Zhao, Z. Tian, H. Tang, and Z. Su, “Individual tree segmentation based on region-growing and density-guided canopy 3d morphology detection using uav lidar data,”IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. PP, pp. 1–14, 01 2025
work page 2025
-
[53]
M. Michałowska, J. Rapi ´nski, and J. Janicka, “Tree position estimation from tls data using hough transform and robust least- squares circle fitting,”Remote Sensing Applications: Society and Environment, vol. 29, p. 100863, 2023. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S2352938522001719
work page 2023
-
[54]
J. Henrich, J. van Delden, D. Seidel, T. Kneib, and A. S. Ecker, “Treelearn: A deep learning method for segmenting individual trees from ground-based lidar forest point clouds,”Ecological Informatics, vol. 84, p. 102888, 2024. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S1574954124004308
work page 2024
-
[55]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space,
C. R. Qi, L. Yi, H. Su, and L. J. Guibas, “Pointnet++: Deep hierarchical feature learning on point sets in a metric space,”Advances in neural information processing systems, vol. 30, 2017
work page 2017
-
[56]
D.-H. Kim, C.-U. Ko, D.-G. Kim, J.-T. Kang, J.-M. Park, and H.-J. Cho, “Automated segmentation of individual tree structures using deep learning over lidar point cloud data,”Forests, vol. 14, no. 6, 2023. [Online]. Available: https://www.mdpi.com/1999-4907/14/6/1159
work page 2023
-
[57]
Recon- structing stem cross section shapes from terrestrial laser scanning,
D. Wang, V . Kankare, E. Puttonen, M. Hollaus, and N. Pfeifer, “Recon- structing stem cross section shapes from terrestrial laser scanning,”IEEE Geoscience and Remote Sensing Letters, vol. 14, no. 2, pp. 272–276, 2017
work page 2017
-
[58]
A density-based al- gorithm for discovering clusters in large spatial databases with noise,
M. Ester, H.-P. Kriegel, J. Sander, and X. Xu, “A density-based al- gorithm for discovering clusters in large spatial databases with noise,” inProceedings of the Second International Conference on Knowledge Discovery and Data Mining, ser. KDD’96. AAAI Press, 1996, p. 226–231
work page 1996
-
[59]
A threshold selection method from gray-level histograms,
N. Otsu, “A threshold selection method from gray-level histograms,” IEEE Transactions on Systems, Man, and Cybernetics, vol. 9, no. 1, pp. 62–66, 1979
work page 1979
-
[60]
Direct least square fitting of ellipses,
A. Fitzgibbon, M. Pilu, and R. Fisher, “Direct least square fitting of ellipses,”IEEE Transactions on Pattern Analysis and Machine Intelli- gence, vol. 21, no. 5, pp. 476–480, 1999
work page 1999
-
[61]
nerfstudio project, “viser,” https://github.com/nerfstudio-project/viser, 2025
work page 2025
-
[62]
Virginia tech campus tree inventory
V . Tech, “Virginia tech campus tree inventory.” [Online]. Available: https://dendro.cnre.vt.edu/campus trees/LatestDraft.html Accepted to the Novel Approaches for Precision Agriculture and Forestry with Autonomous Robots IEEE ICRA Workshop - 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.