An Experimental Characterization of Mechanical Layer Jamming Systems
Pith reviewed 2026-05-18 00:14 UTC · model grok-4.3
The pith
Two-layer structures with tooth protrusions achieve up to 5 times stiffness increase in bending and 3.2 times in torsion.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Mechanical layer jamming realized through two-layer multi-material structures with tooth-like protrusions produces peak stiffness changes of 5 times in bending and 3.2 times in torsion, with tooth geometry as the primary design parameter controlling the outcome; the force required to separate the layers is also measured as a key performance metric often overlooked in prior work.
What carries the argument
Two-layer multi-material structure with tooth-like protrusions that interlock to create jamming and stiffness modulation under applied loads.
If this is right
- Robot designers can tune tooth geometry to target specific stiffness ratios for tasks needing both flexibility and rigidity.
- Measuring separation force allows better prediction of the energy or vacuum level needed to switch states reliably.
- These passive structures reduce the need for continuous power to maintain stiffness once jammed.
Where Pith is reading between the lines
- Curved geometries common in appendages may alter contact between teeth and reduce the achievable stiffness ratio compared with flat tests.
- Long-term cycling could degrade tooth edges, suggesting a need to study wear after hundreds of jam-unjam cycles.
- Combining layer jamming with other actuation methods may create hybrid systems where stiffness modulation complements motion control.
Load-bearing premise
Flat two-layer specimens tested under controlled lab bending and torsion loads will accurately predict behavior in real soft-robot settings that involve curvature, repeated use, and integrated actuation.
What would settle it
Fabricate a curved soft-robot segment incorporating the jammed layers, apply repeated bending-torsion cycles with integrated actuation, and measure whether the observed stiffness ratios match the flat-specimen results within 20 percent.
Figures







read the original abstract
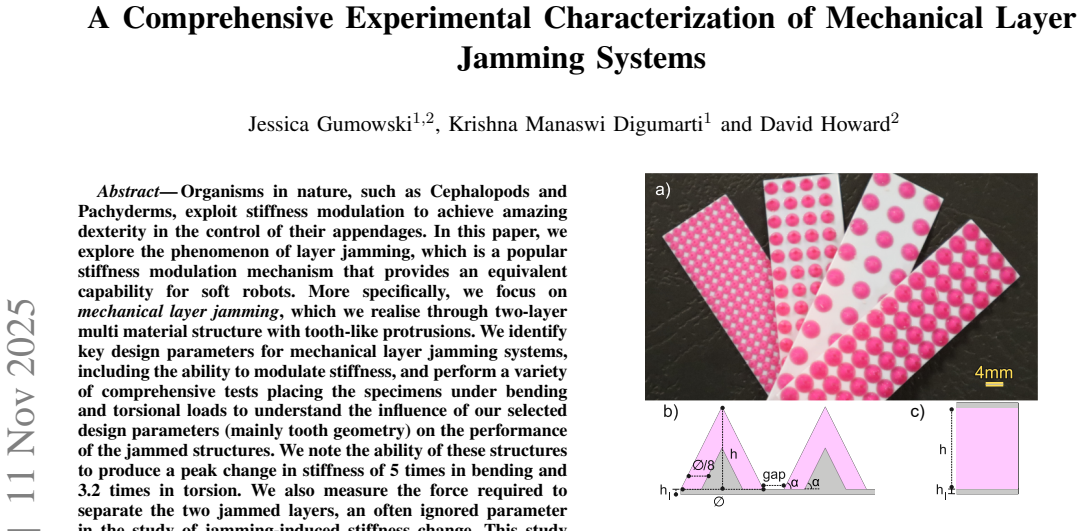
Organisms in nature, such as Cephalopods and Pachyderms, exploit stiffness modulation to achieve amazing dexterity in the control of their appendages. In this paper, we explore the phenomenon of layer jamming, which is a popular stiffness modulation mechanism that provides an equivalent capability for soft robots. More specifically, we focus on mechanical layer jamming, which we realise through two-layer multi material structure with tooth-like protrusions. We identify key design parameters for mechanical layer jamming systems, including the ability to modulate stiffness, and perform a variety of comprehensive tests placing the specimens under bending and torsional loads to understand the influence of our selected design parameters (mainly tooth geometry) on the performance of the jammed structures. We note the ability of these structures to produce a peak change in stiffness of 5 times in bending and 3.2 times in torsion. We also measure the force required to separate the two jammed layers, an often ignored parameter in the study of jamming-induced stiffness change. This study aims to shed light on the principled design of mechanical layer jammed systems and guide researchers in the selection of appropriate designs for their specific application domains.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper experimentally characterizes mechanical layer jamming realized via two-layer multi-material specimens with tooth-like protrusions. It varies tooth geometry as the primary design parameter and reports stiffness modulation under controlled bending and torsion loads on flat coupons, achieving peak ratios of 5× (bending) and 3.2× (torsion) between jammed and unjammed states. The work also quantifies the interlayer separation force and positions the results as guidance for stiffness-modulating mechanisms in soft-robot applications.
Significance. If the measured ratios prove robust, the dataset supplies concrete, application-oriented numbers on how tooth geometry affects jamming performance and includes the often-overlooked separation force. This could aid soft-robot designers in selecting parameters for stiffness modulation. The purely experimental approach avoids circularity with prior models, but the flat-specimen, static-load protocol limits direct transfer to curved or cyclically actuated structures typical of soft robots.
major comments (2)
- Abstract and test-protocol description: the central claim that the reported 5× bending and 3.2× torsion stiffness ratios can guide soft-robot design rests on flat, static coupon tests. The manuscript does not present data on how these ratios evolve under curvature-induced layer separation or after repeated loading cycles, which directly bears on whether the measured peaks remain representative in realistic soft-robot use cases.
- Results section on bending/torsion tests: sample size, error bars, and exact loading rates or fixture compliance are not stated, making it difficult to assess the statistical reliability of the peak ratios cited in the abstract.
minor comments (2)
- Figure captions and axis labels should explicitly state whether stiffness is reported as flexural rigidity, effective modulus, or force-per-deflection to avoid ambiguity when comparing jammed versus unjammed states.
- The separation-force measurement protocol would benefit from a brief description of the test fixture and displacement rate to allow replication.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below, agreeing where the manuscript can be improved and explaining our position on the scope of the work.
read point-by-point responses
-
Referee: Abstract and test-protocol description: the central claim that the reported 5× bending and 3.2× torsion stiffness ratios can guide soft-robot design rests on flat, static coupon tests. The manuscript does not present data on how these ratios evolve under curvature-induced layer separation or after repeated loading cycles, which directly bears on whether the measured peaks remain representative in realistic soft-robot use cases.
Authors: We agree that the experiments were performed exclusively on flat, static coupons, as described in the methods and results sections. The manuscript presents these ratios as outcomes of controlled tests focused on tooth geometry effects rather than as universal values guaranteed to hold in all soft-robot configurations. To address the concern, we will revise the abstract and add a limitations paragraph in the discussion that explicitly notes the flat-specimen, static-load protocol and discusses potential influences of curvature-induced separation and cyclic loading on performance. This will better frame the results as baseline guidance for design parameter selection while acknowledging the need for future validation on curved or dynamic structures. revision: yes
-
Referee: Results section on bending/torsion tests: sample size, error bars, and exact loading rates or fixture compliance are not stated, making it difficult to assess the statistical reliability of the peak ratios cited in the abstract.
Authors: This is a fair point regarding transparency. The current manuscript reports the peak ratios but does not fully detail the experimental statistics or test parameters. We will revise the results section to specify the sample size for each geometry configuration, add error bars (representing standard deviation) to the relevant stiffness plots, and include the exact loading rates along with a description of fixture compliance. These additions will be incorporated in the next version to allow readers to evaluate the reliability of the reported values. revision: yes
Circularity Check
No significant circularity: purely experimental characterization
full rationale
The paper is a purely experimental characterization of two-layer mechanical layer jamming specimens. Central results (peak stiffness change of 5× in bending and 3.2× in torsion) are obtained by direct measurement under controlled bending and torsion loads on flat coupons, with an additional measurement of separation force. No derivations, equations, fitted models, or predictions are presented that could reduce to inputs by construction. No self-citations, uniqueness theorems, or ansatzes are invoked to support the claims. The work consists of design parameter variation, specimen fabrication, and test-rig data collection; all reported quantities stand independently against external benchmarks without circular reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Short-term quasi-static loading produces representative stiffness values for soft-robot applications
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We note the ability of these structures to produce a peak change in stiffness of 5 times in bending and 3.2 times in torsion.
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
This study aims to shed light on the principled design of mechanical layer jammed systems
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Defensive tool use in a coconut-carrying octopus,
J. K. Finn, T. Tregenza, and M. D. Norman, “Defensive tool use in a coconut-carrying octopus,”Current Biology, vol. 19, pp. R1069–R1070, 12 2009. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0960982209019149
work page 2009
-
[2]
Octopuses use a human-like strategy to control precise point-to-point arm movements,
G. Sumbre, G. Fiorito, T. Flash, and B. Hochner, “Octopuses use a human-like strategy to control precise point-to-point arm movements,” Current Biology, vol. 16, pp. 767–772, 4 2006. [Online]. Available: https://linkinghub.elsevier.com/retrieve/pii/S0960982206012747
work page 2006
-
[3]
Topology, dynamics, and control of a muscle-architected soft arm,
A. Tekinalp, N. Naughton, S. H. Kim, U. Halder, R. Gillette, P. G. Mehta, W. Kier, and M. Gazzola, “Topology, dynamics, and control of a muscle-architected soft arm,”Proceedings of the National Academy of Sciences, vol. 121, 10 2024. [Online]. Available: https://pnas.org/doi/10.1073/pnas.2318769121
-
[4]
Stiffening in soft robotics: A review of the state of the art,
M. Manti, V . Cacucciolo, and M. Cianchetti, “Stiffening in soft robotics: A review of the state of the art,”IEEE Robotics & Automation Magazine, vol. 23, no. 3, pp. 93–106, 2016
work page 2016
-
[5]
Principles and methods for stiffness modulation in soft robot design and development,
Y . Yang, Y . Li, and Y . Chen, “Principles and methods for stiffness modulation in soft robot design and development,”Bio-Design and Manufacturing, vol. 1, no. 1, pp. 14–25, 2018
work page 2018
-
[6]
A review of jamming actuation in soft robotics,
S. G. Fitzgerald, G. W. Delaney, and D. Howard, “A review of jamming actuation in soft robotics,” inActuators, vol. 9, no. 4. MDPI, 2020, p. 104
work page 2020
-
[7]
M. S. Xavier, C. D. Tawk, A. Zolfagharian, J. Pinskier, D. Howard, T. Young, J. Lai, S. M. Harrison, Y . K. Yong, M. Bodaghi,et al., “Soft pneumatic actuators: A review of design, fabrication, modeling, sensing, control and applications,”IEEE Access, vol. 10, pp. 59 442– 59 485, 2022
work page 2022
-
[8]
Celebrating soft matter’s 10th anniversary: Toward jamming by design,
H. M. Jaeger, “Celebrating soft matter’s 10th anniversary: Toward jamming by design,”Soft matter, vol. 11, no. 1, pp. 12–27, 2015
work page 2015
-
[9]
A modeling framework for jamming structures,
B. Aktas ¸, Y . S. Narang, N. Vasios, K. Bertoldi, and R. D. Howe, “A modeling framework for jamming structures,”Advanced Functional Materials, vol. 31, no. 16, p. 2007554, 2021
work page 2021
-
[10]
Universal robotic gripper based on the jamming of granular material,
E. Brown, N. Rodenberg, J. Amend, A. Mozeika, E. Steltz, M. R. Zakin, H. Lipson, and H. M. Jaeger, “Universal robotic gripper based on the jamming of granular material,”Proceedings of the National Academy of Sciences, vol. 107, no. 44, pp. 18 809–18 814, 2010
work page 2010
-
[11]
Evolving polydisperse soft robotic jamming grippers,
S. G. Fitzgerald, G. W. Delaney, D. Howard, and F. Maire, “Evolving polydisperse soft robotic jamming grippers,” inProceedings of the Genetic and Evolutionary Computation Conference Companion, ser. GECCO ’22. New York, NY , USA: Association for Computing Machinery, 2022, p. 707–710. [Online]. Available: https://doi.org/10.1145/3520304.3529072
-
[12]
D. Howard, J. O’Connor, J. Letchford, T. Joseph, S. Lin, S. Baldwin, and G. Delaney, “A comprehensive dataset of grains for granular jamming in soft robotics: Grip strength and shock absorption,” in2023 IEEE International Conference on Soft Robotics (RoboSoft). IEEE, 2023, pp. 1–8
work page 2023
-
[13]
One-shot 3d-printed multimaterial soft robotic jamming grippers,
G. D. Howard, J. Brett, J. O’Connor, J. Letchford, and G. W. Delaney, “One-shot 3d-printed multimaterial soft robotic jamming grippers,” Soft Robotics, vol. 9, no. 3, pp. 497–508, 2022
work page 2022
-
[14]
A compliant robotic leg based on fibre jamming,
L. Liow, J. Brett, J. Pinskier, L. Hanson, L. Tidswell, N. Kottege, and D. Howard, “A compliant robotic leg based on fibre jamming,”IEEE Transactions on Robotics, 2024
work page 2024
-
[15]
Folding for stiffening: A novel corrugated electro-adhesive clutch,
Y . Wang, C. Wu, X. Li, Y . Li, X. Gao, K. M. Digumarti, and C. Cao, “Folding for stiffening: A novel corrugated electro-adhesive clutch,” in2023 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2023, pp. 1–6
work page 2023
-
[16]
Electro-adhesive tubular clutch for variable-stiffness robots,
Y . Sun, K. M. Digumarti, H.-V . Phan, O. Aloui, and D. Floreano, “Electro-adhesive tubular clutch for variable-stiffness robots,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 9628–9634
work page 2022
-
[17]
R. Baines, B. Yang, L. A. Ramirez, and R. Kramer-Bottiglio, “Kirigami layer jamming,”Extreme Mechanics Letters, vol. 64, p. 102084, 2023
work page 2023
-
[18]
Jamming skins that control system rigidity from the sur- face,
D. S. Shah, E. J. Yang, M. C. Yuen, E. C. Huang, and R. Kramer- Bottiglio, “Jamming skins that control system rigidity from the sur- face,”Advanced Functional Materials, vol. 31, 1 2021. [Online]. Avail- able: https://onlinelibrary.wiley.com/doi/10.1002/adfm.202006915
-
[19]
P. Li, Y . Zhang, J. Quan, G. Zhang, D. Zhou, and L. Li, “Enhanced deformation resistance and load-bearing capacity in tip-growing robots through scale-inspired layer jamming mechanism,”Soft Robotics, 6 2025. [Online]. Available: https://www.liebertpub.com/doi/10.1089/soro.2024.0147
-
[20]
Matejam: Multi-material teeth-clutching layer jamming actuation for soft haptic glove,
Z. Wang, X. Zhou, Z. Zhou, Y . Zhang, Y . Zhang, and D. Wang, “Matejam: Multi-material teeth-clutching layer jamming actuation for soft haptic glove,”IEEE Transactions on Haptics, vol. 16, pp. 276– 286, 4 2023
work page 2023
-
[21]
A wearable sensory textile-based clutch with high blocking force,
A. Sadeghi, A. Mondini, M. Totaro, B. Mazzolai, and L. Beccai, “A wearable sensory textile-based clutch with high blocking force,”Ad- vanced Engineering Materials, vol. 21, 11 2019. [Online]. Available: https://onlinelibrary.wiley.com/doi/10.1002/adem.201900886
-
[22]
A vacuum powered soft textile-based clutch,
A. Sadeghi, A. Mondini, and B. Mazzolai, “A vacuum powered soft textile-based clutch,”Actuators, vol. 8, p. 47, 6 2019. [Online]. Available: https://www.mdpi.com/2076-0825/8/2/47
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.