Learning Dynamic Rope Manipulation Using Task-Level Iterative Learning Control
Pith reviewed 2026-05-15 19:41 UTC · model grok-4.3
The pith
Task-level iterative learning control lets robots master dynamic flying knots from one human demonstration and a simplified rope model.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The method inverts a simplified model of the robot and rope at each iteration by solving a quadratic program that maps observed task-space errors into corrective action updates; starting from one human demonstration, this produces a controller that reliably executes the non-planar flying-knot motion on hardware.
What carries the argument
Task-level iterative learning control that solves a quadratic program to propagate task-space errors into action updates using a simplified rope model.
If this is right
- The same inversion step yields 100 percent success on every tested rope within ten hardware trials.
- Most rope-to-rope transfers succeed after only two to five additional trials.
- No large demonstration sets or massive simulation are required once the initial demonstration is given.
- The approach works for non-planar dynamic manipulation without explicit planning of contact sequences.
Where Pith is reading between the lines
- The same error-propagation step could be applied to other under-actuated deformable tasks such as cloth folding or cable routing.
- Because updates occur directly on hardware, the method may remain effective when simulation parameters drift from real-world conditions.
- If the quadratic program can be solved at higher frequency, the same framework might support online adaptation during a single continuous motion.
Load-bearing premise
The simplified rope model is accurate enough that the quadratic-program inversion produces action updates that actually reduce the observed task errors.
What would settle it
Running the learning procedure on a new rope and finding that success rate stays below 100 percent after ten trials, or that the quadratic-program updates produce no consistent improvement in knot completion.
Figures








read the original abstract
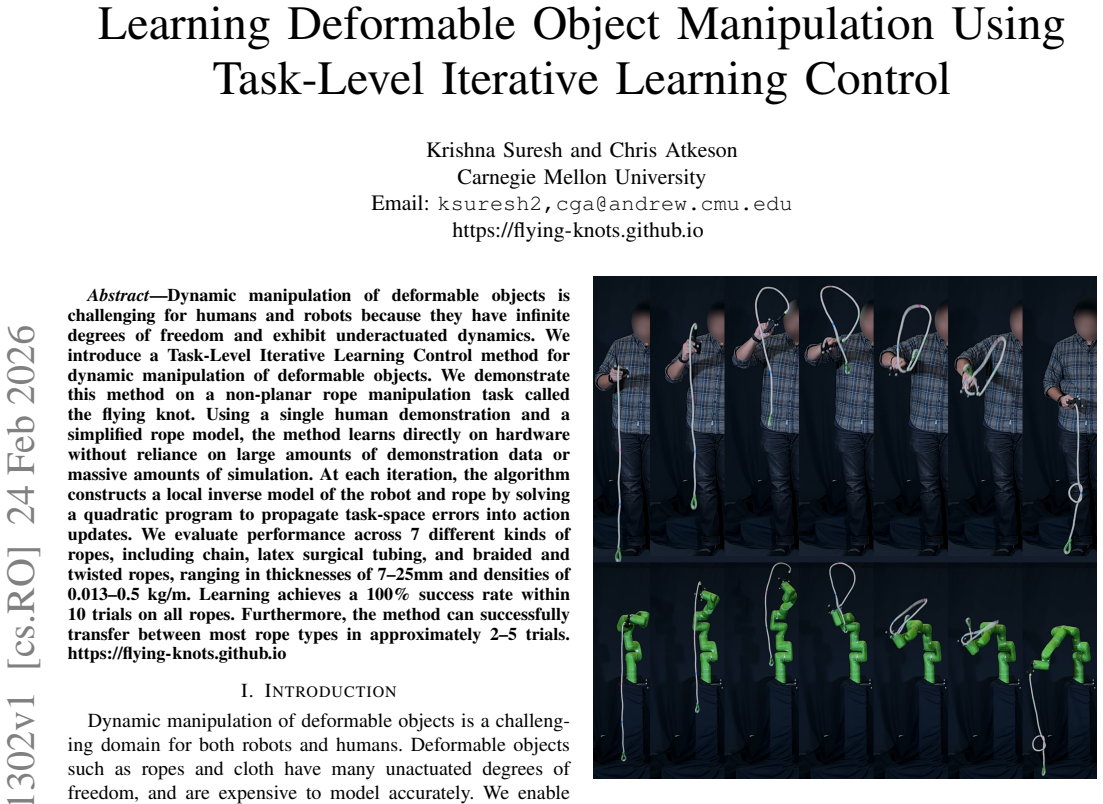
We introduce a Task-Level Iterative Learning Control method for dynamic manipulation of ropes. We demonstrate this method on a non-planar rope manipulation task called the flying knot. Using a single human demonstration and a simplified rope model, the method learns directly on hardware without reliance on large amounts of demonstration data or massive amounts of simulation. At each iteration, the algorithm inverts a model of the robot and rope by solving a quadratic program to propagate task-space errors into action updates. We evaluate performance across 7 different kinds of ropes, including chain, latex surgical tubing, and braided and twisted ropes, ranging in thicknesses of 7--25\,mm and densities of 0.013--0.5\,kg/m. Learning achieves a 100\% success rate within 10 trials on all ropes. Furthermore, the method can successfully transfer between most rope types in 2--5 trials. https://flying-knots.github.io
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Task-Level Iterative Learning Control (TILC) for dynamic rope manipulation on the non-planar flying knot task. Using one human demonstration and a single simplified rope model, the approach learns directly on hardware by solving a quadratic program (QP) at each iteration to invert the combined robot-rope model and map task-space errors into action updates. It reports 100% success within 10 trials across seven ropes (chain, latex, braided, twisted; 7-25 mm, 0.013-0.5 kg/m) and successful transfer between most rope types in 2-5 trials, without large demonstration sets or simulation.
Significance. If the central result holds, the work demonstrates a practical, data-efficient route to hardware-only learning for underactuated dynamic manipulation of deformable objects. The single-model, single-demo, QP-inversion design avoids the usual requirements for massive simulation or many demonstrations and shows rapid cross-rope transfer; these are concrete strengths that would be of interest to the robotics community working on deformable-object control.
major comments (2)
- [Abstract] Abstract: the central claim that the simplified rope model enables reliable QP inversion for the flying knot rests on the unverified assumption that the model captures the inertial, contact, and timing dynamics sufficiently for non-planar swings. No quantitative validation (e.g., comparison of predicted vs. observed rope trajectories or residual error after QP updates) is provided to show that the model-derived corrections are the primary driver of the reported 100% success rather than hardware trial-and-error.
- [Abstract] The evaluation reports 100% success within 10 trials and 2-5 trial transfer but supplies no per-rope trial statistics, failure-mode breakdown, or task-error metrics (e.g., knot completion time, position error at contact). Without these, it is impossible to assess whether the QP updates are effective or whether the result is driven by the simplified model.
minor comments (1)
- [Abstract] The abstract states the method works across seven ropes but does not specify the exact model equations or the QP formulation (objective, constraints, decision variables). Adding these would allow readers to evaluate the inversion step directly.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the significance of our work and for the constructive feedback. We address each of the major comments below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the simplified rope model enables reliable QP inversion for the flying knot rests on the unverified assumption that the model captures the inertial, contact, and timing dynamics sufficiently for non-planar swings. No quantitative validation (e.g., comparison of predicted vs. observed rope trajectories or residual error after QP updates) is provided to show that the model-derived corrections are the primary driver of the reported 100% success rather than hardware trial-and-error.
Authors: We acknowledge that providing quantitative validation of the rope model's accuracy would strengthen the manuscript. In the revised version, we have added a new subsection in the experiments that compares the rope trajectories predicted by the simplified model against the observed trajectories from the robot's motion capture system for representative trials. We also report the residual errors in the QP solutions across iterations to demonstrate that the model-based updates are indeed driving the convergence to successful knotting, rather than pure trial-and-error. revision: yes
-
Referee: [Abstract] The evaluation reports 100% success within 10 trials and 2-5 trial transfer but supplies no per-rope trial statistics, failure-mode breakdown, or task-error metrics (e.g., knot completion time, position error at contact). Without these, it is impossible to assess whether the QP updates are effective or whether the result is driven by the simplified model.
Authors: We agree that additional details on the per-rope performance would improve the evaluation. We have revised the results section to include a table summarizing the number of trials required for success for each of the seven ropes, along with average knot completion times and position errors at the point of contact. Failure modes were primarily early-trial timing mismatches, which were corrected by the ILC updates. This data supports that the QP-based corrections are effective across rope types. revision: yes
Circularity Check
No significant circularity detected in the ILC derivation
full rationale
The paper's core derivation uses a fixed simplified rope model inverted via quadratic programming to map observed task-space errors (from hardware trials) into action updates. This inversion is a standard model-based correction step and does not reduce to the target success rate or any fitted parameter by construction. Success rates (100% within 10 trials, transfer in 2-5 trials) are reported as empirical outcomes on real hardware across 7 ropes, not as mathematical identities derived from the inputs. No self-citation chains, ansatz smuggling, or renaming of known results appear as load-bearing elements in the provided abstract and method description. The approach remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Simplified rope model suffices for QP-based error propagation in dynamic manipulation
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
At each iteration, the algorithm inverts a model of the robot and rope by solving a quadratic program to propagate task-space errors into action updates.
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We model the rope as a 3D serial chain of point masses m connected by fixed-distance constraints of length l. Each joint in the rope has a bending stiffness k and a damping coefficient b.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Using inaccurate models in reinforcement learning
Pieter Abbeel, Morgan Quigley, and Andrew Y Ng. Using inaccurate models in reinforcement learning. In Proceedings of the 23rd International Conference on Machine Learning, pages 1–8, 2006
work page 2006
-
[2]
Potential field methods and their inherent limitations for mobile robot navigation,
E.W. Aboaf, C.G. Atkeson, and D.J. Reinkensmeyer. Task-level robot learning. InProceedings. 1988 IEEE International Conference on Robotics and Automation, pages 1309–1310 vol.2, 1988. doi: 10.1109/ROBOT. 1988.12245
-
[3]
A regret minimization approach to iterative learning control
Naman Agarwal, Elad Hazan, Anirudha Majumdar, and Karan Singh. A regret minimization approach to iterative learning control. InProceedings of the 38th Interna- tional Conference on Machine Learning, pages 100–
-
[4]
URL https://proceedings.mlr.press/v139/ agarwal21b.html
PMLR. URL https://proceedings.mlr.press/v139/ agarwal21b.html
-
[5]
Chae H. An, Christopher G. Atkeson, and John Holler- bach.Model-Based Control of a Robot Manipulator. Artificial Intelligence Series. MIT Press. ISBN 978-0- 262-51157-5
-
[6]
Bettering operation of robots by learning
Suguru Arimoto, Sadao Kawamura, and Fumio Miyazaki. Bettering operation of robots by learning. Journal of Robotic Systems, 1(2):123–140, 1984
work page 1984
-
[7]
C. Atkeson and J. McIntyre. Robot trajectory learning through practice. In1986 IEEE International Con- ference on Robotics and Automation Proceedings, vol- ume 3, pages 1737–1742. URL https://ieeexplore.ieee. org/document/1087423
-
[8]
D.A. Bristow, M. Tharayil, and A.G. Alleyne. A survey of iterative learning control.IEEE Control Systems Magazine, 26(3):96–114, 2006. doi: 10.1109/MCS.2006. 1636313
-
[9]
Linear-time vari- ational integrators in maximal coordinates
Jan Br ¨udigam and Zachary Manchester. Linear-time vari- ational integrators in maximal coordinates. In Steven M. LaValle, Ming Lin, Timo Ojala, Dylan Shell, and Jingjin Yu, editors,Algorithmic Foundations of Robotics XIV, volume 17, pages 194–209. Springer International Pub- lishing. doi: 10.1007/978-3-030-66723-8 12. URL http: //link.springer.com/10.100...
-
[10]
Efficiently learning single-arm fling motions to smooth garments
Lawrence Yunliang Chen, Huang Huang, Ellen Novoseller, Daniel Seita, Jeffrey Ichnowski, Michael Laskey, Richard Cheng, Thomas Kollar, and Ken Goldberg. Efficiently learning single-arm fling motions to smooth garments. URL http://arxiv.org/abs/2206.08921
-
[11]
Yiyang Chen, Bing Chu, and Christopher T. Freeman. Point-to-point iterative learning control with optimal tracking time allocation.IEEE Transactions on Con- trol Systems Technology, 26(5):1685–1698, 2018. doi: 10.1109/TCST.2017.2735358
-
[12]
Iterative residual policy: for goal-conditioned dynamic manipulation of deformable objects
Cheng Chi, Benjamin Burchfiel, Eric Cousineau, Siyuan Feng, and Shuran Song. Iterative residual policy: for goal-conditioned dynamic manipulation of deformable objects. URL http://arxiv.org/abs/2203.00663
-
[13]
Ronghu Chi, Danwei Wang, Frank L Lewis, Zhongsheng Hou, and Shangtai Jin. Adaptive terminal ilc for iteration- varying target points.Asian Journal of Control, 17(3): 952–962, 2015
work page 2015
-
[14]
Gill, Walter Murray, and Michael A
Philip E. Gill, Walter Murray, and Michael A. Saunders. Snopt: An sqp algorithm for large-scale constrained optimization.SIAM Journal on Optimization, 12(4):979– 1006, 2002. doi: 10.1137/S1052623499350013. URL https://doi.org/10.1137/S1052623499350013
-
[15]
Paul J. Goulart and Yuwen Chen. Clarabel: An interior- point solver for conic programs with quadratic objectives,
- [16]
-
[17]
Zico Kolter, and Zachary Manchester
Swaminathan Gurumurthy, J. Zico Kolter, and Zachary Manchester. Deep off-policy iterative learning control. In Proceedings of The 5th Annual Learning for Dynamics and Control Conference, pages 639–652. PMLR. URL https://proceedings.mlr.press/v211/gurumurthy23b.html
-
[18]
Flingbot: The unreasonable effectiveness of dynamic manipulation for cloth unfold- ing, 2021
Huy Ha and Shuran Song. Flingbot: The unreasonable effectiveness of dynamic manipulation for cloth unfold- ing, 2021. URL https://arxiv.org/abs/2105.03655
-
[19]
Eric Hannus, Tran Nguyen Le, David Blanco-Mulero, and Ville Kyrki. Dynamic manipulation of deformable objects using imitation learning with adaptation to hard- ware constraints. In2024 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), pages 12655–12662. IEEE, 2024
work page 2024
-
[20]
RaC: Robot learning for long-horizon tasks by scaling recovery and correction
Zheyuan Hu, Robyn Wu, Naveen Enock, Jasmine Li, Riya Kadakia, Zackory Erickson, and Aviral Kumar. RaC: Robot learning for long-horizon tasks by scaling recovery and correction. URL http://arxiv.org/abs/2509. 07953
-
[21]
Self- supervised cloth reconstruction via action-conditioned cloth tracking
Zixuan Huang, Xingyu Lin, and David Held. Self- supervised cloth reconstruction via action-conditioned cloth tracking. InIEEE International Conference on Robotics and Automation (ICRA), 2023, 2023
work page 2023
-
[22]
Tae-Yong Kuc, Kwanghee Nam, and J.S. Lee. An iterative learning control of robot manipulators.IEEE Transactions on Robotics and Automation, 7(6):835–842,
-
[23]
doi: 10.1109/70.105392
-
[24]
Vincent Lim, Huang Huang, Lawrence Yunliang Chen, Jonathan Wang, Jeffrey Ichnowski, Daniel Seita, Michael Laskey, and Ken Goldberg. Real2sim2real: Self- supervised learning of physical single-step dynamic ac- tions for planar robot casting. In2022 International Conference on Robotics and Automation (ICRA), pages 8282–8289. doi: 10.1109/ICRA46639.2022.9811...
-
[25]
Na Lin, Ronghu Chi, Biao Huang, and Zhongsheng Hou. Event-triggered nonlinear iterative learning control.IEEE Transactions on Neural Networks and Learning Systems, 32(11):5118–5128, 2020
work page 2020
-
[26]
Iterative learning control: A survey and new results.Journal of Robotic Systems, 9(5):563–594, 1992
Kevin L Moore, Mohammed Dahleh, and SP Bhat- tacharyya. Iterative learning control: A survey and new results.Journal of Robotic Systems, 9(5):563–594, 1992
work page 1992
-
[27]
Nah, Aleksei Krotov, Marta Russo, Dagmar Sternad, and Neville Hogan
Moses C. Nah, Aleksei Krotov, Marta Russo, Dagmar Sternad, and Neville Hogan. Dynamic primitives facili- tate manipulating a whip. In2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), pages 685–691, Nov 2020. doi: 10.1109/BioRob49111.2020.9224399
-
[28]
Com- bining self-supervised learning and imitation for vision- based rope manipulation
Ashvin Nair, Dian Chen, Pulkit Agrawal, Phillip Isola, Pieter Abbeel, Jitendra Malik, and Sergey Levine. Com- bining self-supervised learning and imitation for vision- based rope manipulation. In2017 IEEE International Conference on Robotics and Automation (ICRA), pages 2146–2153, 2017. doi: 10.1109/ICRA.2017.7989247
-
[29]
James D. Ratcliffe, Paul L. Lewin, Eric Rogers, Jari J. Hatonen, and David H. Owens. Norm-optimal iterative learning control applied to gantry robots for automation applications.IEEE Transactions on Robotics, 22(6): 1303–1307, 2006. doi: 10.1109/TRO.2006.882927
-
[30]
Gautam Salhotra, I-Chun Arthur Liu, Marcus Dominguez-Kuhne, and Gaurav S. Sukhatme. Learning deformable object manipulation from expert demonstrations.IEEE Robotics and Automation Letters, 7(4):8775–8782, 2022. doi: 10.1109/LRA.2022.3187843
-
[31]
Angela P. Schoellig, Fabian L. Mueller, and Raffaello D’Andrea. Optimization-based iterative learning for precise quadrocopter trajectory tracking. 33(1):103–127. doi: 10.1007/s10514-012-9283-2. URL https://doi.org/ 10.1007/s10514-012-9283-2
-
[32]
Optimization- based iterative learning control for trajectory tracking
Angela Sch ¨ollig and Raffaello D’Andrea. Optimization- based iterative learning control for trajectory tracking. In 2009 European Control Conference (ECC), pages 1505– 1510, 2009. doi: 10.23919/ECC.2009.7074619
-
[33]
Te Tang, Changhao Wang, and Masayoshi Tomizuka. A framework for manipulating deformable linear ob- jects by coherent point drift.IEEE Robotics and Automation Letters, 3(4):3426–3433, 2018. doi: 10. 1109/LRA.2018.2852770. URL https://ieeexplore.ieee. org/document/8403315
-
[34]
Drake: Model-based design and verification for robotics, 2019
Russ Tedrake and the Drake Development Team. Drake: Model-based design and verification for robotics, 2019. URL https://drake.mit.edu
work page 2019
-
[35]
C.L. van Oosten, O.H. Bosgra, and B.G. Dijkstra. Reduc- ing residual vibrations through iterative learning control, with application to a wafer stage. InProceedings of the 2004 American Control Conference, volume 6, pages 5150–5155 vol.6, 2004. doi: 10.23919/ACC.2004. 1384669
-
[36]
Anirudh Vemula, Wen Sun, Maxim Likhachev, and J. An- drew Bagnell. On the effectiveness of iterative learning control. InProceedings of The 4th Annual Learning for Dynamics and Control Conference, pages 47–58. PMLR. URL https://proceedings.mlr.press/v168/vemula22a.html
-
[37]
Self-supervised learning of dy- namic planar manipulation of free-end cables
Jonathan Wang, Huang Huang, Vincent Lim, Harry Zhang, Jeffrey Ichnowski, Daniel Seita, Yunliang Chen, and Ken Goldberg. Self-supervised learning of dy- namic planar manipulation of free-end cables. URL http://arxiv.org/abs/2405.09581
-
[38]
and Shah, Kunal and Miller, Lee E and Cotton, R
Junyi Wang and Xiaofeng Xiong. A learning-based control framework for human-like whip targeting. In 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), pages 550–555. doi: 10.1109/BioRob60516.2024. 10719935. URL https://ieeexplore.ieee.org/document/ 10719935/. ISSN: 2155-1782
-
[39]
Multi-robot task planning under individual and collaborative temporal logic specifications
Xiaofeng Xiong, Moses C. Nah, Aleksei Krotov, and Dagmar Sternad. Online impedance adaptation fa- cilitates manipulating a whip. In2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 9297–9302. doi: 10.1109/ IROS51168.2021.9636663. URL https://ieeexplore.ieee. org/document/9636663
-
[40]
Motion planning for dynamic knotting of a flexible rope with a high-speed robot arm
Yuji Yamakawa, Akio Namiki, and Masatoshi Ishikawa. Motion planning for dynamic knotting of a flexible rope with a high-speed robot arm. In2010 IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems, pages 49–54, 2010. doi: 10.1109/IROS.2010.5651168
-
[41]
Yuji Yamakawa, Akio Namiki, and Masatoshi Ishikawa. Motion planning for dynamic folding of a cloth with two high-speed robot hands and two high-speed sliders. In 2011 IEEE International Conference on Robotics and Automation, pages 5486–5491, 2011. doi: 10.1109/ ICRA.2011.5979606
-
[42]
Viser: Imperative, web-based 3d visualization in python.arXiv preprint arXiv:2507.22885, 2025
Brent Yi, Chung Min Kim, Justin Kerr, Gina Wu, Re- becca Feng, Anthony Zhang, Jonas Kulhanek, Hongsuk Choi, Yi Ma, Matthew Tancik, and Angjoo Kanazawa. Viser: Imperative, web-based 3d visualization in python. arXiv preprint arXiv:2507.22885, 2025
-
[43]
Hang Yin, Anastasia Varava, and Danica Kragic. Mod- eling, learning, perception, and control methods for deformable object manipulation.Science Robotics, 6(54):eabd8803, 2021. doi: 10.1126/scirobotics. abd8803. URL https://www.science.org/doi/abs/10.1126/ scirobotics.abd8803
-
[44]
Robots of the lost arc: Self-supervised learning to dynamically manipulate fixed-endpoint cables
Harry Zhang, Jeffrey Ichnowski, Daniel Seita, Jonathan Wang, Huang Huang, and Ken Goldberg. Robots of the lost arc: Self-supervised learning to dynamically manipulate fixed-endpoint cables. URL http://arxiv.org/ abs/2011.04840. TABLE III INVERSEMODELPARAMETERS Parameter Value wcontrol 0.5 wcritical pos 25 wcritical vel 0.00375 wpc 100 wvc 0.1 wRc 5 wpf t ...
-
[45]
Inverse Model Parameters:We use the shorthand ∥a∥2 W :=a ⊤Wa. The critical-point objective weights the rope-marker position and velocity errors att c with a diagonal matrix Q:= diag(w critical posI3N , w critical velI3N), whereNis the number of rope markers (links). In general,w is a diagonal cost element for a cost matrix. The control-update regularizer ...
-
[46]
Lete f t(t;u(t))denote the end-effector error vector defined in Section F
QP Hand Tracking Objective:Fort∈[t c, T], we encourage the robot to match the demonstrator’s follow- through motion by penalizing the end-effector tracking error. Lete f t(t;u(t))denote the end-effector error vector defined in Section F. This error depends nonlinearly on the command through the Bezier spline and forward kinematics. We linearize ef t about...
-
[47]
Select a temporary range ˜t0 and ˜tf that excludes noisy data from the human picking up and placing the rope on the floor
-
[48]
Search for maximum hand velocity in the range[ ˜t0, ˜tf] and label ast peak
-
[49]
Step backwards in time fromt peak and update ˜t0 to the first point when the hand velocity is near-zero (3% of velocity att peak)
-
[50]
Sett f =t c+35ms as a fixed follow through time length
-
[51]
Integrate along the hand path motion between ˜t0 andt f , then sett 0 to the time when 5% of the total path length is traveled. h(t)is then defined as 3D pose trajectory of the hand between t0 andt f .x demo(t)is the rope trajectory fromt 0 tot c. Each demonstration type has a different execution speed and overall time length. TABLE V DEMONSTRATIONTRACKIN...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.