Skill-informed Data-driven Haptic Nudges for High-dimensional Human Motor Learning
Pith reviewed 2026-05-15 12:30 UTC · model grok-4.3
The pith
An IOHMM of latent skill evolution feeds a POMDP that computes haptic nudge policies, producing faster gains in movement efficiency and accuracy than heuristic feedback.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
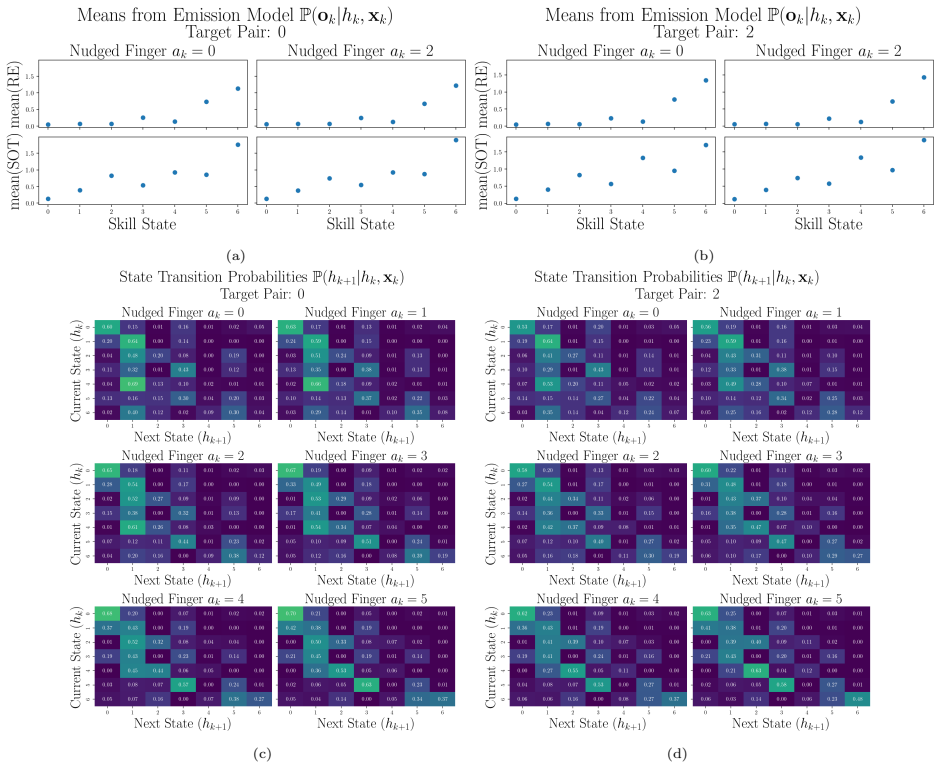
By treating skill as a latent Markov state whose transitions are driven by haptic inputs and whose emissions are observed performance metrics, the input-output hidden Markov model supplies a predictive distribution over future skill. Solving the corresponding POMDP yields a policy that delivers nudges only when they are expected to reduce cumulative cost and advance the learner to higher-skill regimes. Human experiments confirm that this policy yields accelerated movement efficiency, improved endpoint accuracy, and quicker emergence of low-dimensional synergies relative to heuristic or null feedback conditions.
What carries the argument
The input-output hidden Markov model that decouples latent skill evolution from observable performance under haptic inputs, which parametrizes the POMDP solved for the optimal nudging policy.
If this is right
- The POMDP policy minimizes long-term performance cost while guiding learners toward higher-skill states.
- Trained participants exhibit accelerated movement efficiency and endpoint accuracy compared with heuristic or null feedback.
- Synergy analysis indicates faster discovery of efficient low-dimensional motor representations.
- The framework is demonstrated on a high-dimensional redundant task delivered through a hand exoskeleton.
Where Pith is reading between the lines
- The same modeling approach could be applied to other sensory channels such as visual or force feedback for rehabilitation settings.
- Online re-estimation of the IOHMM parameters during a session could produce individualized nudge policies without retraining from scratch.
- Tasks with still higher dimensionality would test whether the observed rapid synergy compression generalizes or saturates.
Load-bearing premise
The input-output hidden Markov model accurately decouples and predicts how latent skill evolves separately from directly observed performance when haptic nudges are applied in the target task.
What would settle it
A replication study in which participants trained with the POMDP policy show no significant advantage in movement efficiency or endpoint accuracy over the heuristic-feedback control group would falsify the performance claim.
Figures






read the original abstract
In this work, we propose a data-driven framework to design optimal haptic nudge feedback leveraging the learner's estimated skill to address the challenge of learning a novel motor task in a high-dimensional, redundant motor space. A nudge is a series of vibrotactile feedback delivered to the learner to encourage motor movements that aid in task completion. We first model the stochastic dynamics of human motor learning under haptic nudges using an Input-Output Hidden Markov Model (IOHMM), which explicitly decouples latent skill evolution from observable performance measures. Leveraging this predictive model, we formulate the haptic nudge feedback design problem as a Partially Observable Markov Decision Process (POMDP). This allows us to derive an optimal nudging policy that minimizes long-term performance cost and implicitly guides the learner toward superior skill states. We validate our approach through a human participant study (N=30) involving a high-dimensional motor task rendered through a hand exoskeleton. Results demonstrate that participants trained with the POMDP-derived policy exhibit significantly accelerated movement efficiency and endpoint accuracy compared to groups receiving heuristic-based feedback or no feedback. Furthermore, synergy analysis reveals that the POMDP group discovers efficient low-dimensional motor representations more rapidly.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a data-driven framework for haptic nudge feedback in high-dimensional motor learning tasks. It models stochastic skill dynamics under nudges via an Input-Output Hidden Markov Model (IOHMM) that decouples latent skill states from observables, then casts policy design as a POMDP to minimize long-term cost and guide learners to better skill states. Validation is provided by a 30-participant human study with a hand-exoskeleton task, claiming statistically significant gains in movement efficiency and endpoint accuracy for the POMDP-derived policy versus heuristic or no-feedback controls, plus faster emergence of efficient motor synergies.
Significance. If the results hold after addressing the noted gaps, the work would provide a principled, model-based method for adaptive haptic assistance that integrates predictive skill modeling with decision-theoretic planning. This could advance personalized feedback systems in rehabilitation robotics and motor training, particularly for redundant high-dimensional spaces where heuristic approaches are common.
major comments (2)
- [Abstract and Results] Abstract and Results: The central claim of statistically significant acceleration in efficiency and accuracy for the POMDP group is reported without specifying the exact statistical tests, effect sizes, confidence intervals, baseline comparisons, or participant exclusion criteria. These details are load-bearing for evaluating whether the observed differences support the claimed mechanism rather than unmodeled factors.
- [Methods (IOHMM formulation)] Methods (IOHMM formulation): The IOHMM is presented as accurately decoupling latent skill evolution from observable performance measures in a high-dimensional redundant space, yet no validation is provided (e.g., recovery of known ground-truth states in simulation, comparison to alternative latent-variable models, or sensitivity analysis). Because the POMDP policy is solved on the resulting belief space, misspecification here directly undermines the optimality guarantee and the interpretation of the human-study gains.
minor comments (1)
- [Synergy analysis] Synergy analysis section: The claim that the POMDP group discovers efficient low-dimensional motor representations more rapidly would be strengthened by reporting explicit quantitative metrics (e.g., synergy dimensionality or variance explained) together with statistical comparisons across the three groups.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important aspects of statistical reporting and model validation. We address each major comment below and will revise the manuscript to strengthen these elements while preserving the core contributions.
read point-by-point responses
-
Referee: [Abstract and Results] Abstract and Results: The central claim of statistically significant acceleration in efficiency and accuracy for the POMDP group is reported without specifying the exact statistical tests, effect sizes, confidence intervals, baseline comparisons, or participant exclusion criteria. These details are load-bearing for evaluating whether the observed differences support the claimed mechanism rather than unmodeled factors.
Authors: We agree these details are necessary for full evaluation. In the revised manuscript we will explicitly state the statistical tests (independent-samples t-tests with Bonferroni correction for multiple comparisons), report effect sizes (Cohen's d), 95% confidence intervals for all key metrics, confirm the baselines as the heuristic-feedback and no-feedback groups described in the methods, and detail participant exclusion criteria (no participants were excluded beyond pre-registered criteria for technical failures). These additions will clarify that the reported gains align with the proposed skill-modeling mechanism. revision: yes
-
Referee: [Methods (IOHMM formulation)] Methods (IOHMM formulation): The IOHMM is presented as accurately decoupling latent skill evolution from observable performance measures in a high-dimensional redundant space, yet no validation is provided (e.g., recovery of known ground-truth states in simulation, comparison to alternative latent-variable models, or sensitivity analysis). Because the POMDP policy is solved on the resulting belief space, misspecification here directly undermines the optimality guarantee and the interpretation of the human-study gains.
Authors: We recognize that explicit validation of the IOHMM would strengthen confidence in the latent-state decoupling and downstream POMDP policy. The current manuscript prioritizes the human-study results, but we will add a dedicated simulation subsection in the revision. This will include: (i) recovery of known ground-truth skill states from synthetic trajectories generated under the fitted IOHMM, (ii) quantitative comparison against a standard HMM baseline using log-likelihood and state-recovery accuracy, and (iii) sensitivity analysis on emission and transition parameters. These results will support the model's suitability for the POMDP formulation. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper first fits an IOHMM to observed performance data under nudges to obtain a predictive model of latent skill evolution, then uses that fitted model as the transition and observation dynamics inside a POMDP whose solution yields the nudging policy. The policy is subsequently tested in an independent N=30 human study whose outcome (faster efficiency and accuracy gains) is reported as an empirical result rather than an algebraic identity. No equation in the provided derivation reduces the claimed policy optimality or the study outcome directly back to the input data by construction, and no load-bearing step relies on a self-citation whose content is itself unverified. The chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Human motor skill evolves as a latent stochastic process that can be decoupled from observable performance via an input-output hidden Markov model
- standard math A POMDP formulation yields an optimal nudging policy that minimizes long-term performance cost
Reference graph
Works this paper leans on
-
[1]
Principles of sensorimotor learning,
D. M. Wolpert, J. Diedrichsen, and J. R. Flanagan, “Principles of sensorimotor learning,” Nature Reviews Neuroscience, vol. 12, no. 12, p. 739, 2011
work page 2011
-
[2]
Theoretical models of motor control and motor learning,
A. M. Haith and J. W. Krakauer, “Theoretical models of motor control and motor learning,” in Routledge handbook of motor control and motor learning . Routledge, 2013, pp. 16–37
work page 2013
-
[3]
Human sensorimotor learning: adaptation, skill, and beyond,
J. W. Krakauer and P. Mazzoni, “Human sensorimotor learning: adaptation, skill, and beyond,” Current Opinion in Neurobiology , vol. 21, no. 4, pp. 636–644, 2011
work page 2011
-
[4]
Learning to be lazy: Exploiting redundancy in a novel task to minimize movement-related effort,
R. Ranganathan, A. Adewuyi, and F. A. Mussa-Ivaldi, “Learning to be lazy: Exploiting redundancy in a novel task to minimize movement-related effort,” Journal of Neuroscience, vol. 33, no. 7, pp. 2754–2760, 2013
work page 2013
-
[5]
Review of control strategies for robotic movement training after neurologic injury,
L. Marchal-Crespo and D. J. Reinkensmeyer, “Review of control strategies for robotic movement training after neurologic injury,” Journal of Neuroengineering and Rehabilitation , vol. 6, no. 1, p. 20, 2009
work page 2009
-
[6]
Motor learning perspectives on haptic training for the upper ex- tremities,
C. K. Williams and H. Carnahan, “Motor learning perspectives on haptic training for the upper ex- tremities,” IEEE Transactions on Haptics , vol. 7, no. 2, pp. 240–250, 2014
work page 2014
-
[7]
A. Turolla, O. A. Daud Albasini, R. Oboe, M. Agostini, P. Tonin, S. Paolucci, G. Sandrini, A. Venneri, and L. Piron, “Haptic-based neurorehabilitation in poststroke patients: A feasibility prospective mul- ticentre trial for robotics hand rehabilitation,” Computational and Mathematical Methods in Medicine , vol. 2013, no. 1, p. 895492, 2013
work page 2013
-
[8]
Development of a novel haptic glove for improving finger dexterity in poststroke rehabilitation,
C.-Y. Lin, C.-M. Tsai, P.-C. Shih, and H.-C. Wu, “Development of a novel haptic glove for improving finger dexterity in poststroke rehabilitation,” Technology and Health Care , vol. 24, no. 1_suppl, pp. S97–S103, 2016
work page 2016
-
[9]
P. Esmatloo and A. D. Deshpande, “Fingertip position and force control for dexterous manipulation through model-based control of hand-exoskeleton-environment,” in 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) . IEEE, 2020, pp. 994–1001
work page 2020
-
[10]
E. Basalp, P. Wolf, and L. Marchal-Crespo, “Haptic training: Which types facilitate (re)learning of which motor task and for whom? Answers by a review,” IEEE Transactions on Haptics , vol. 14, no. 4, pp. 722–739, 2021
work page 2021
-
[11]
Augmented visual, auditory, haptic, and multimodal feedback in motor learning: A review,
R. Sigrist, G. Rauter, R. Riener, and P. Wolf, “Augmented visual, auditory, haptic, and multimodal feedback in motor learning: A review,” Psychonomic Bulletin & Review , vol. 20, no. 1, pp. 21–53, 2013
work page 2013
-
[12]
Haptic feedback based on movement smoothness improves performance in a perceptual-motor task,
J. L. Sullivan, S. Pandey, M. D. Byrne, and M. K. O’Malley, “Haptic feedback based on movement smoothness improves performance in a perceptual-motor task,” IEEE Transactions on Haptics , vol. 15, no. 2, pp. 382–391, 2021
work page 2021
-
[13]
J. B. Rowe, V. Chan, M. L. Ingemanson, S. C. Cramer, E. T. Wolbrecht, and D. J. Reinkensmeyer, “Robotic assistance for training finger movement using a Hebbian model: A randomized controlled trial,” Neurorehabilitation and Neural Repair , vol. 31, no. 8, pp. 769–780, 2017
work page 2017
-
[14]
On the role of knowledge of results in motor learning: Exploring the guidance hypothesis,
T. D. Lee, M. A. White, and H. Carnahan, “On the role of knowledge of results in motor learning: Exploring the guidance hypothesis,” Journal of Motor Behavior , vol. 22, no. 2, pp. 191–208, 1990
work page 1990
-
[15]
Static and dynamic proprioceptive recognition through vibrotactile stimulation,
L. Vargas, H. Huang, Y. Zhu, and X. Hu, “Static and dynamic proprioceptive recognition through vibrotactile stimulation,” Journal of Neural Engineering , vol. 18, no. 4, p. 046093, 2021
work page 2021
-
[16]
Exploration of vibrotactile biofeedback strategies to induce stance time asymmetries,
R. Escamilla-Nunez, H. Sivasambu, and J. Andrysek, “Exploration of vibrotactile biofeedback strategies to induce stance time asymmetries,” Canadian Prosthetics & Orthotics Journal , vol. 5, no. 1, p. 36744, 2021. 18
work page 2021
-
[17]
N. Signal, S. Olsen, U. Rashid, R. McLaren, A. Vandal, M. King, and D. Taylor, “Haptic nudging using a wearable device to promote upper limb activity during stroke rehabilitation: Exploring diurnal variation, repetition, and duration of effect,” Behavioral Sciences, vol. 13, no. 12, p. 995, 2023
work page 2023
-
[18]
Modeling the distinct phases of skill acquisition
C. Tenison and J. R. Anderson, “Modeling the distinct phases of skill acquisition. ” Journal of Experi- mental Psychology: Learning, Memory, and Cognition , vol. 42, no. 5, p. 749, 2016
work page 2016
-
[19]
Hidden Markov model approach to skill learning and its application to telerobotics,
J. Yang, Y. Xu, and C. S. Chen, “Hidden Markov model approach to skill learning and its application to telerobotics,” IEEE Transactions on Robotics and Automation , vol. 10, no. 5, pp. 621–631, 1994
work page 1994
-
[20]
A multilevel logistic hidden Markov model for learning under cognitive diagnosis,
S. Zhang and H.-H. Chang, “A multilevel logistic hidden Markov model for learning under cognitive diagnosis,” Behavior Research Methods , vol. 52, no. 1, pp. 408–421, 2020
work page 2020
-
[21]
Classification of human learning stages via kernel distribution embeddings,
M. S.-T. Yuh, K. R. Ortiz, K. S. Sommer-Kohrt, M. Oishi, and N. Jain, “Classification of human learning stages via kernel distribution embeddings,” IEEE Open Journal of Control Systems , vol. 3, pp. 102–117, 2024
work page 2024
- [22]
-
[23]
Modelling and evaluation of surgical performance using hidden markov models,
G. Megali, S. Sinigaglia, O. Tonet, and P. Dario, “Modelling and evaluation of surgical performance using hidden markov models,” IEEE Transactions on Biomedical Engineering , vol. 53, no. 10, pp. 1911–1919, 2006
work page 1911
-
[24]
Determining novice and expert status in human– automation interaction through hidden Markov models,
A. French, M. L. Cummings, H. Zhu, and M. Pajic, “Determining novice and expert status in human– automation interaction through hidden Markov models,” Applied Artificial Intelligence , vol. 38, no. 1, p. 2402174, 2024
work page 2024
-
[25]
Capturing skill state in curriculum learning for human skill acquisition,
K. Ghonasgi, R. Mirsky, S. Narvekar, B. Masetty, A. M. Haith, P. Stone, and A. D. Deshpande, “Capturing skill state in curriculum learning for human skill acquisition,” in IEEE/RSJ International Conference on Intelligent Robots and Systems , 2021, pp. 771–776
work page 2021
-
[26]
De- tecting neural-state transitions using hidden Markov models for motor cortical prostheses,
C. Kemere, G. Santhanam, B. M. Yu, A. Afshar, S. I. Ryu, T. H. Meng, and K. V. Shenoy, “De- tecting neural-state transitions using hidden Markov models for motor cortical prostheses,” Journal of Neurophysiology, vol. 100, no. 4, pp. 2441–2452, 2008
work page 2008
-
[27]
S. Kirchherr, S. Mildiner Moraga, G. Coudé, M. Bimbi, P. F. Ferrari, E. Aarts, and J. J. Bonaiuto, “Bayesian multilevel hidden Markov models identify stable state dynamics in longitudinal recordings from macaque primary motor cortex,” European Journal of Neuroscience , vol. 58, no. 3, pp. 2787–2806, 2023
work page 2023
-
[28]
Interacting adaptive processes with different timescales underlie short-term motor learning,
M. A. Smith, A. Ghazizadeh, and R. Shadmehr, “Interacting adaptive processes with different timescales underlie short-term motor learning,” PLoS Biology, vol. 4, no. 6, p. e179, 2006
work page 2006
-
[29]
The dynamics of motor learning through the formation of internal models,
C. Pierella, M. Casadio, F. A. Mussa-Ivaldi, and S. A. Solla, “The dynamics of motor learning through the formation of internal models,” PLoS Computational Biology , vol. 15, no. 12, p. e1007118, 2019
work page 2019
-
[30]
Human motor learning dynamics in high- dimensional tasks,
A. Kamboj, R. Ranganathan, X. Tan, and V. Srivastava, “Human motor learning dynamics in high- dimensional tasks,” PLOS Computational Biology , vol. 20, no. 10, p. e1012455, 2024
work page 2024
-
[31]
A decision-theoretic approach in the design of an adaptive upper-limb stroke rehabilitation robot,
R. Huq, P. Kan, R. Goetschalckx, D. Hébert, J. Hoey, and A. Mihailidis, “A decision-theoretic approach in the design of an adaptive upper-limb stroke rehabilitation robot,” in IEEE International Conference on Rehabilitation Robotics , 2011, pp. 1–8
work page 2011
-
[32]
Toward skill-informed haptic feedback for hu- man motor learning in high-dimensional de-novo tasks,
A. Kamboj, R. Ranganathan, X. Tan, and V. Srivastava, “Toward skill-informed haptic feedback for hu- man motor learning in high-dimensional de-novo tasks,” in American Control Conference, New Orleans, LA, 2026, accepted for publication. 19
work page 2026
-
[33]
Remapping hand movements in a novel geometrical environment,
K. M. Mosier, R. A. Scheidt, S. Acosta, and F. A. Mussa-Ivaldi, “Remapping hand movements in a novel geometrical environment,” Journal of Neurophysiology , vol. 94, no. 6, pp. 4362–4372, 2005
work page 2005
-
[34]
Input-output HMMs for sequence processing,
Y. Bengio and P. Frasconi, “Input-output HMMs for sequence processing,” IEEE Transactions on Neural Networks, vol. 7, no. 5, pp. 1231–1249, 1996
work page 1996
-
[35]
IOHMM: Input Output Hidden Markov Model in Python,
M. Yin, T. Silva, E. Denovellis, and A. Pozdnukhov, “IOHMM: Input Output Hidden Markov Model in Python,” https://github.com/Mogeng/IOHMM, 2017, version 0.0.3, BSD-3-Clause License
work page 2017
-
[36]
Multinomial logistic regression,
C. Kwak and A. Clayton-Matthews, “Multinomial logistic regression,” Nursing Research, vol. 51, no. 6, pp. 404–410, 2002
work page 2002
-
[37]
A simple weight decay can improve generalization,
A. Krogh and J. A. Hertz, “A simple weight decay can improve generalization,” in Proceedings of the 5th International Conference on Neural Information Processing Systems , 1991, pp. 950––957
work page 1991
-
[38]
Regularization and variable selection via the elastic net,
H. Zou and T. Hastie, “Regularization and variable selection via the elastic net,” Journal of the Royal Statistical Society Series B: Statistical Methodology , vol. 67, no. 2, pp. 301–320, 2005
work page 2005
-
[39]
Learning policies for partially observable envi- ronments: Scaling up,
M. L. Littman, A. R. Cassandra, and L. P. Kaelbling, “Learning policies for partially observable envi- ronments: Scaling up,” in Machine Learning Proceedings 1995 . Elsevier, 1995, pp. 362–370
work page 1995
-
[40]
Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor,
T. Haarnoja, A. Zhou, P. Abbeel, and S. Levine, “Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor,” in International Conference on Machine Learning . PMLR, 2018, pp. 1861–1870
work page 2018
-
[41]
Restricted maximum likelihood (REML) estimation of variance com- ponents in the mixed model,
R. R. Corbeil and S. R. Searle, “Restricted maximum likelihood (REML) estimation of variance com- ponents in the mixed model,” Technometrics, vol. 18, no. 1, pp. 31–38, 1976. 20
work page 1976
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.