Recognition: 1 theorem link
· Lean TheoremOn the Derivation of Tightly-Coupled LiDAR-Inertial Odometry with VoxelMap
Pith reviewed 2026-05-15 10:11 UTC · model grok-4.3
The pith
A concise derivation unifies geometric LiDAR modeling with probabilistic estimation in VoxelMap-based iterated error-state Kalman filter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
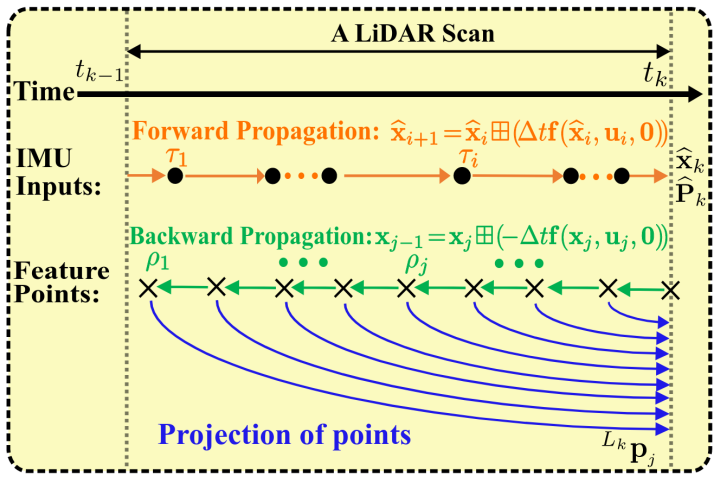
The derivation presents explicit equations for state propagation from IMU measurements, LiDAR point-to-plane residuals expressed in the VoxelMap, and the iterated error-state Kalman filter update that fuses both sensors while maintaining consistent covariance and Jacobian terms throughout.
What carries the argument
VoxelMap representation of LiDAR points combined with the iterated error-state Kalman filter that carries the geometric and probabilistic fusion.
If this is right
- The explicit Jacobians and residual formulations allow direct reproduction of the filter without re-deriving the geometry-to-probability mapping.
- Consistent notation across IMU integration and LiDAR residuals reduces implementation errors when extending the system to new platforms.
- The iterated update structure supports higher accuracy in nonlinear regimes compared with single-step filters.
- The VoxelMap representation decouples map maintenance from the filter equations, permitting independent optimization of voxel resolution.
Where Pith is reading between the lines
- The unified notation could serve as a template for deriving similar tightly-coupled estimators that replace VoxelMap with other map representations such as surfels or octrees.
- Because the paper stops at the derivation, a natural next step is to quantify how the iterated filter reduces linearization error relative to non-iterated versions on standard benchmarks.
- The self-contained equations lower the barrier for researchers who wish to add new measurement models while preserving the existing error-state structure.
Load-bearing premise
Standard geometric and noise models for LiDAR points and inertial measurements remain valid inside the VoxelMap and filter without additional unmodeled effects or sensor-specific biases.
What would settle it
Implement the derived state-transition, measurement, and covariance equations in code and compare the resulting trajectory estimates against an independent LiDAR-inertial reference on the same dataset; mismatch in estimated states or covariance growth would indicate an inconsistency in the derivation.
Figures



read the original abstract
This note presents a concise mathematical formulation of tightly-coupled LiDAR-Inertial Odometry within an iterated error-state Kalman filter framework using a VoxelMap representation. Rather than proposing a new algorithm, it provides a clear and self-contained derivation that unifies the geometric modeling and probabilistic state estimation through consistent notation and explicit formulations. The document is intended to serve both as a technical reference and as an accessible entry point for a foundational understanding of the system architecture and estimation principles.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a concise mathematical formulation of tightly-coupled LiDAR-Inertial Odometry within an iterated error-state Kalman filter framework using a VoxelMap representation. It unifies geometric modeling of LiDAR points with probabilistic state estimation through explicit state definitions, measurement models, and Jacobian derivations, serving as a technical reference rather than proposing a new algorithm.
Significance. If the derivations hold, the work provides a valuable self-contained reference that consolidates standard techniques in LIO with consistent notation, which could support reproducibility, teaching, and implementation in robotics. The explicit formulations of the IESKF update and VoxelMap integration represent a strength for readers seeking foundational clarity without ad-hoc modeling choices.
minor comments (2)
- [§3.2] §3.2, measurement model: the transition from raw LiDAR points to voxel residuals could include one additional line showing the explicit subtraction of the predicted point from the voxel center to improve traceability for readers implementing the Jacobian.
- The paper would benefit from a short table in the introduction or conclusion comparing the derived state vector and covariance propagation steps against two or three prior LIO works (e.g., FAST-LIO, LINS) to make the unification contribution more immediately visible.
Simulated Author's Rebuttal
We are grateful to the referee for the positive evaluation of our manuscript. The referee's summary accurately reflects the purpose of the note as a concise mathematical formulation and self-contained derivation for LiDAR-Inertial Odometry. We appreciate the recommendation for minor revision. As no specific major comments were provided in the report, we have no points to address and no revisions to make.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper explicitly frames itself as a derivation of standard iterated error-state Kalman filter and VoxelMap techniques rather than a new algorithm. All load-bearing steps consist of explicit state definitions, measurement models, and Jacobian derivations that follow from stated geometric and noise assumptions without any fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations. The central unification occurs through consistent notation applied to externally standard models, with no reduction of outputs to inputs by construction. This matches the most common honest non-finding for reference derivations.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.lean, Cost/FunctionalEquation.leanreality_from_one_distinction, washburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
iterated error-state Kalman filter ... point-to-plane residual ... VoxelMap probabilistic plane
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ntu viral: A visual-inertial-ranging-lidar dataset, from an aerial vehicle viewpoint,
T.-M. Nguyen, S. Yuan, M. Cao, Y. Lyu,et al., “Ntu viral: A visual-inertial-ranging-lidar dataset, from an aerial vehicle viewpoint,”The International Journal of Robotics Research, vol. 41, no. 3, pp. 270–280, 2022. [Online]. Available: https://doi.org/10.1177/02783649211052312
-
[2]
Mars-lvig dataset: A multi-sensor aerial robots slam dataset for lidar-visual-inertial-gnss fusion,
H. Li, Y. Zou, N. Chen, J. Lin,et al., “Mars-lvig dataset: A multi-sensor aerial robots slam dataset for lidar-visual-inertial-gnss fusion,”The International Journal of Robotics Research, vol. 43, no. 8, pp. 1114–1127, 2024. [Online]. Available: https://doi.org/10.1177/02783649241227968
-
[3]
Agrilira4d: A multi-sensor uav dataset for robust slam in challenging agricultural fields,
Z. Zhan, Y. Ming, S. Li, and J. Yuan, “Agrilira4d: A multi-sensor uav dataset for robust slam in challenging agricultural fields,” 2025. [Online]. Available: https://arxiv.org/abs/2512.01753
-
[4]
Fast-lio2: Fast direct lidar-inertial odometry,
W. Xu, Y. Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar-inertial odometry,” IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2053–2073, 2022
work page 2053
-
[5]
C. Bai, T. Xiao, Y. Chen, H. Wang,et al., “Faster-lio: Lightweight tightly coupled lidar-inertial odometry using parallel sparse incremental voxels,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4861–4868, 2022
work page 2022
-
[6]
Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,
T. Shan, B. Englot, D. Meyers, W. Wang,et al., “Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 5135–5142
work page 2020
-
[7]
Towards high-performance solid-state-lidar-inertial odometry and mapping,
K. Li, M. Li, and U. D. Hanebeck, “Towards high-performance solid-state-lidar-inertial odometry and mapping,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 5167–5174, 2021
work page 2021
-
[8]
Quaternion kinematics for the error-state Kalman filter
J. Sol` a, “Quaternion kinematics for the error-state kalman filter,” 2017. [Online]. Available: https://arxiv.org/abs/1711.02508
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[9]
The iterated kalman filter update as a gauss-newton method,
B. Bell and F. Cathey, “The iterated kalman filter update as a gauss-newton method,”IEEE Transactions on Automatic Control, vol. 38, no. 2, pp. 294–297, 1993
work page 1993
-
[10]
Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,
C. Yuan, W. Xu, X. Liu, X. Hong, and F. Zhang, “Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 8518–8525, 2022
work page 2022
-
[11]
Voxelmap++: Mergeable voxel mapping method for online lidar (-inertial) odometry,
C. Wu, Y. You, Y. Yuan, X. Kong,et al., “Voxelmap++: Mergeable voxel mapping method for online lidar (-inertial) odometry,”IEEE Robotics and Automation Letters, vol. 9, no. 1, pp. 427–434, 2023
work page 2023
-
[12]
C 3 p-voxelmap: Compact, cumulative and coalescible probabilistic voxel mapping,
X. Yang, W. Li, Q. Ge, L. Suo,et al., “C 3 p-voxelmap: Compact, cumulative and coalescible probabilistic voxel mapping,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 7908–7915
work page 2024
-
[13]
Z. Liu, H. Li, C. Yuan, X. Liu,et al., “Voxel-slam: A complete, accurate, and versatile light de- tection and ranging-inertial simultaneous localization and mapping system,”Advanced Intelligent Systems, p. e202501081, 2026
work page 2026
-
[14]
C. Hertzberg, R. Wagner, U. Frese, and L. Schr¨ oder, “Integrating generic sensor fusion algorithms with sound state representations through encapsulation of manifolds,”Information Fusion, vol. 14, no. 1, pp. 57–77, 2013
work page 2013
-
[15]
C. Yuan, X. Liu, X. Hong, and F. Zhang, “Pixel-level extrinsic self calibration of high resolution lidar and camera in targetless environments,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7517–7524, 2021
work page 2021
-
[16]
Kalman filters on differentiable manifolds,
D. He, W. Xu, and F. Zhang, “Kalman filters on differentiable manifolds,”arXiv preprint arXiv:2102.03804, 2021
-
[17]
Balm: Bundle adjustment for lidar mapping,
Z. Liu and F. Zhang, “Balm: Bundle adjustment for lidar mapping,”IEEE Robotics and Automa- tion Letters, vol. 6, no. 2, pp. 3184–3191, 2021. 22
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.