MonoSAOD: Monocular 3D Object Detection with Sparsely Annotated Label
Pith reviewed 2026-05-13 21:35 UTC · model grok-4.3
The pith
Monocular 3D object detection works with sparse labels by augmenting road patches and filtering pseudo-labels through prototypes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a monocular 3D detector trained under sparse supervision can reach robust performance by combining Road-Aware Patch Augmentation, which places segmented object patches onto road regions while preserving 3D geometric consistency, with Prototype-Based Filtering, which generates high-quality pseudo-labels by maintaining global 2D RoI feature prototypes and selecting predictions that are both feature-consistent with those prototypes and have reliable depth estimates.
What carries the argument
Road-Aware Patch Augmentation (RAPA) for geometry-preserving data expansion paired with Prototype-Based Filtering (PBF) that selects pseudo-labels via prototype similarity and depth uncertainty.
If this is right
- Detectors can maintain accuracy when annotation density falls well below full labeling.
- Geometric consistency during patch placement prevents unrealistic training examples that would otherwise hurt depth prediction.
- Prototype similarity combined with depth uncertainty produces higher-quality pseudo-labels than confidence thresholding alone.
- The same training strategy applies across multiple sparsity ratios without retraining the core architecture.
Where Pith is reading between the lines
- The prototype mechanism could be adapted to other semi-supervised 3D tasks such as depth completion with partial labels.
- Combining the method with selective active learning might further cut annotation cost by focusing labels on objects the prototypes cannot yet classify reliably.
- The road-region assumption for augmentation restricts direct use to driving scenes and would need replacement by scene-specific surfaces in indoor or aerial settings.
Load-bearing premise
That matching a prediction to learned prototypes and checking its depth uncertainty will consistently select accurate pseudo-labels without letting incorrect ones degrade the detector.
What would settle it
Train on a dataset with 10 percent of objects labeled, measure 3D detection accuracy when using only prototype-plus-depth filtering versus using all model predictions, and check whether the filtered set yields measurably lower error.
Figures




read the original abstract
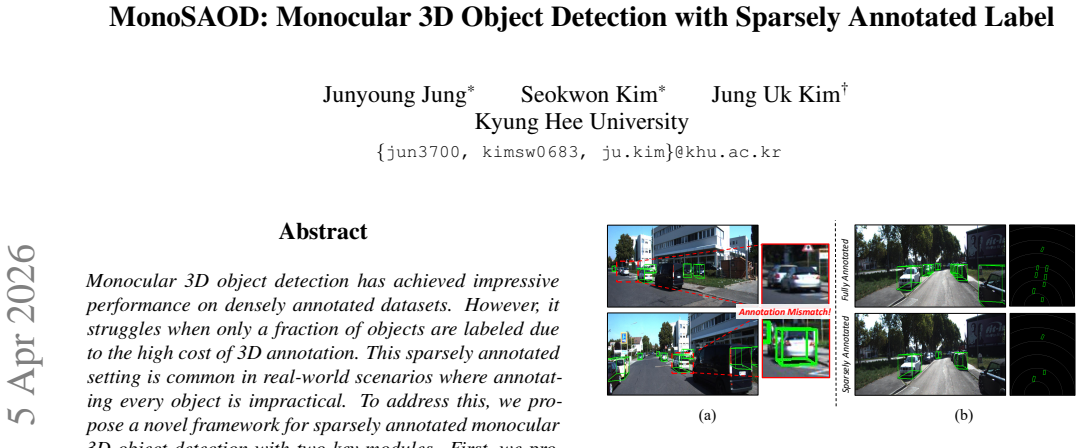
Monocular 3D object detection has achieved impressive performance on densely annotated datasets. However, it struggles when only a fraction of objects are labeled due to the high cost of 3D annotation. This sparsely annotated setting is common in real-world scenarios where annotating every object is impractical. To address this, we propose a novel framework for sparsely annotated monocular 3D object detection with two key modules. First, we propose Road-Aware Patch Augmentation (RAPA), which leverages sparse annotations by augmenting segmented object patches onto road regions while preserving 3D geometric consistency. Second, we propose Prototype-Based Filtering (PBF), which generates high-quality pseudo-labels by filtering predictions through prototype similarity and depth uncertainty. It maintains global 2D RoI feature prototypes and selects pseudo-labels that are both feature-consistent with learned prototypes and have reliable depth estimates. Our training strategy combines geometry-preserving augmentation with prototype-guided pseudo-labeling to achieve robust detection under sparse supervision. Extensive experiments demonstrate the effectiveness of the proposed method. The source code is available at https://github.com/VisualAIKHU/MonoSAOD .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes MonoSAOD, a framework for monocular 3D object detection under sparse annotations. It introduces Road-Aware Patch Augmentation (RAPA) to augment segmented object patches onto road regions while preserving 3D geometric consistency, and Prototype-Based Filtering (PBF) to generate high-quality pseudo-labels by maintaining global 2D RoI feature prototypes and selecting predictions that are feature-consistent with the prototypes and have low depth uncertainty. The training strategy combines these modules to achieve robust detection, with the abstract claiming extensive experiments demonstrate effectiveness and source code provided.
Significance. If the central claims hold, the work addresses a practical limitation of high 3D annotation costs in monocular detection by leveraging sparse labels through geometry-preserving augmentation and prototype-guided pseudo-labeling. This could advance semi-supervised methods in the field. The public release of source code at https://github.com/VisualAIKHU/MonoSAOD is a clear strength for reproducibility.
major comments (2)
- [Prototype-Based Filtering (PBF) module] PBF description: The central claim that PBF reliably selects high-quality pseudo-labels rests on the assumption that prototypes learned from the sparse labeled set remain representative of the full object distribution and that monocular depth uncertainty accurately down-weights errors. Under extreme sparsity this risks biased prototypes and scale-ambiguous depth estimates, which could propagate errors rather than improve detection; a specific ablation or analysis of prototype quality (e.g., similarity scores on held-out data) is needed to support the robustness claim.
- [Experiments section] Experimental results: The abstract asserts that the combined strategy achieves robust detection, yet no quantitative evidence (e.g., mAP at 10-30% label sparsity versus baselines, or error rates on pseudo-labels) is referenced to verify that PBF improves rather than degrades performance; without such load-bearing results the effectiveness claim cannot be assessed.
minor comments (1)
- Define acronyms such as RoI on first use for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point by point below and will incorporate revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Prototype-Based Filtering (PBF) module] PBF description: The central claim that PBF reliably selects high-quality pseudo-labels rests on the assumption that prototypes learned from the sparse labeled set remain representative of the full object distribution and that monocular depth uncertainty accurately down-weights errors. Under extreme sparsity this risks biased prototypes and scale-ambiguous depth estimates, which could propagate errors rather than improve detection; a specific ablation or analysis of prototype quality (e.g., similarity scores on held-out data) is needed to support the robustness claim.
Authors: We agree that a dedicated analysis of prototype quality would further support the robustness claims. In the revised manuscript we will add an ablation study that computes prototype similarity scores on held-out data across different sparsity levels. This analysis will quantify how well the prototypes learned from the sparse labeled set represent the full distribution and will include breakdowns showing the contribution of depth uncertainty in filtering low-quality predictions. The new results will directly address potential bias and error propagation concerns. revision: yes
-
Referee: [Experiments section] Experimental results: The abstract asserts that the combined strategy achieves robust detection, yet no quantitative evidence (e.g., mAP at 10-30% label sparsity versus baselines, or error rates on pseudo-labels) is referenced to verify that PBF improves rather than degrades performance; without such load-bearing results the effectiveness claim cannot be assessed.
Authors: The experiments section already contains the requested quantitative evidence, including mAP results at 10%, 20%, and 30% label sparsity versus multiple baselines as well as pseudo-label error-rate reductions attributable to PBF. However, we acknowledge that the abstract and certain textual passages do not explicitly cross-reference these tables and figures. In the revision we will update the abstract to cite the key mAP gains and pseudo-label quality metrics, and we will insert explicit pointers to the relevant tables throughout the experiments section so that the supporting evidence is immediately visible. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's central claims rest on two proposed modules (RAPA for geometry-preserving augmentation and PBF for prototype-guided pseudo-labeling) whose descriptions invoke standard computer-vision primitives (patch augmentation on road regions, RoI feature prototypes, depth uncertainty filtering) without reducing any prediction to a fitted parameter by construction or relying on load-bearing self-citations. The derivation chain is self-contained: the method is defined independently of the target performance metric and is evaluated on external benchmarks rather than tautologically re-deriving its inputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Road-Aware Patch Augmentation preserves 3D geometric consistency when pasting segmented object patches onto road regions
- domain assumption Prototype similarity and depth uncertainty together identify high-quality pseudo-labels
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
PBF maintains global 2D RoI feature prototypes and selects pseudo-labels that are both feature-consistent with learned prototypes and have reliable depth estimates (S_proto = max cosine similarity, S_depth = exp(-σ))
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
RAPA performs 3D-aware horizontal translation and rotation update while preserving observation angle α
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Boundary IoU: Improving object- centric image segmentation evaluation
Bowen Cheng, Ross Girshick, Piotr Doll´ar, Alexander C Berg, and Alexander Kirillov. Boundary IoU: Improving object- centric image segmentation evaluation. InCVPR, 2021
work page 2021
-
[2]
Mon- odgp: Monocular 3D object detection with decoupled-query and geometry-error priors
Fanqi Pu, Yifan Wang, Jiru Deng, and Wenming Yang. Mon- odgp: Monocular 3D object detection with decoupled-query and geometry-error priors. InCVPR, 2025
work page 2025
-
[3]
Sparsedet: Improving sparsely annotated object detection with pseudo-positive mining
Saksham Suri, Saketh Rambhatla, Rama Chellappa, and Ab- hinav Shrivastava. Sparsedet: Improving sparsely annotated object detection with pseudo-positive mining. InICCV, 2023
work page 2023
-
[4]
Calibrated teacher for sparsely annotated object detection
Haohan Wang, Liang Liu, Boshen Zhang, Jiangning Zhang, Wuhao Zhang, Zhenye Gan, Yabiao Wang, Chengjie Wang, and Haoqian Wang. Calibrated teacher for sparsely annotated object detection. InAAAI, 2023
work page 2023
-
[5]
Co- mining: Self-supervised learning for sparsely annotated object detection
Tiancai Wang, Tong Yang, Jiale Cao, and Xiangyu Zhang. Co- mining: Self-supervised learning for sparsely annotated object detection. InAAAI, 2021
work page 2021
-
[6]
Co-Student: Collaborating Strong and Weak Students for Sparsely Annotated Object Detection
Lianjun Wu, Jiangxiao Han, Zengqiang Zheng, and Xinggang Wang. Co-Student: Collaborating Strong and Weak Students for Sparsely Annotated Object Detection. InECCV, 2024
work page 2024
-
[7]
Lei Yang, Xinyu Zhang, Jun Li, Li Wang, Minghan Zhu, Chuang Zhang, and Huaping Liu. Mix-teaching: A simple, unified and effective semi-supervised learning framework for monocular 3D object detection. InTCSVT, 2023
work page 2023
-
[8]
MonoDETR: Depth- guided transformer for monocular 3D object detection
Renrui Zhang, Han Qiu, Tai Wang, Ziyu Guo, Ziteng Cui, Yu Qiao, Hongsheng Li, and Peng Gao. MonoDETR: Depth- guided transformer for monocular 3D object detection. In ICCV, 2023
work page 2023
-
[9]
Alleviating foreground sparsity for semi-supervised monocular 3D object detection
Weijia Zhang, Dongnan Liu, Chao Ma, and Weidong Cai. Alleviating foreground sparsity for semi-supervised monocular 3D object detection. InWACV, 2024. (a) (b) (c) Figure S.4. Visualization of pseudo-labels added during training. (a) shows the sparsely annotated ground-truth labels. (b) presents the combined set of ground-truth and newly added pseudo-labels...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.