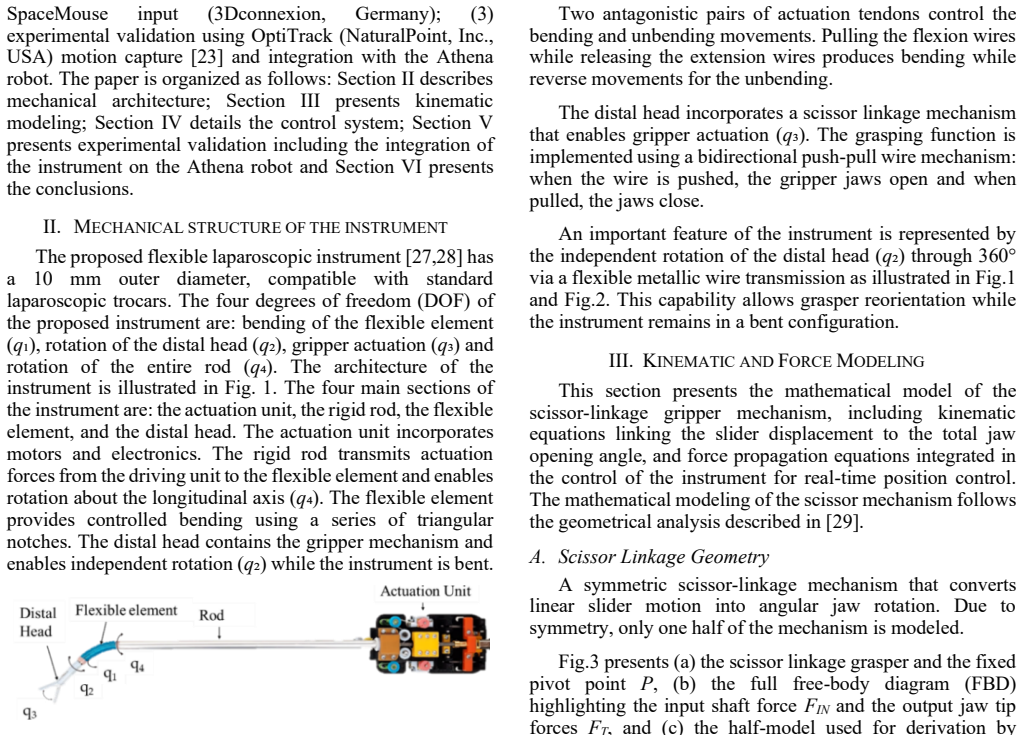
Control Architecture and experimental validation of a Novel Surgical Robotic Instrument
Pith reviewed 2026-05-10 19:43 UTC · model grok-4.3
The pith
A 4-DOF laparoscopic instrument with scissor-linkage gripper integrates into a parallel robot and achieves 1.43 degree jaw accuracy in a simulated pancreatic surgery.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors derive and parameterize an analytical scissor-linkage model for the gripper that predicts jaw opening angle. The model matches CAD reference values with a mean absolute error of 0.13 degrees and OptiTrack motion-capture recordings with a mean absolute error of 1.43 degrees. The full 4-DOF instrument is implemented on embedded hardware and integrated with the ATHENA parallel robot, with the combined system successfully performing a simulated pancreatic surgery procedure.
What carries the argument
The analytical scissor-linkage model, a geometric parameterization that maps actuator input to jaw opening angle for the gripper mechanism.
If this is right
- The gripper achieves sub-1.5-degree positioning accuracy using only the analytical model and embedded control.
- The instrument adds three independent degrees of freedom beyond standard shaft rotation while remaining compatible with 10 mm trocars.
- Teleoperation via SpaceMouse on Raspberry Pi 5 hardware supports real-time control of all four axes.
- Mounting on the ATHENA parallel robot extends the reachable workspace for minimally invasive tasks.
- Successful completion of a simulated pancreatic surgery indicates the architecture can handle representative procedural steps.
Where Pith is reading between the lines
- If the model holds under tissue loads, the design could reduce reliance on additional sensors for gripper control.
- Pairing this flexible distal instrument with parallel robots may create hybrid platforms that combine large workspace with fine tip dexterity.
- The low-error validation suggests the same linkage modeling approach could apply to other scissor-based end-effectors in surgical or industrial robots.
- The simulation result implies the next logical step is ex-vivo or animal testing to measure tissue interaction forces.
Load-bearing premise
The parameterized scissor-linkage kinematics remain accurate in physical hardware without large unmodeled effects from friction, backlash, or manufacturing differences, and that performance in a simulated procedure predicts behavior on live tissue.
What would settle it
A direct measurement of actual jaw opening angle during tissue interaction that deviates by more than 1.43 degrees from the model's prediction would show the model fails to capture real behavior.
Figures


read the original abstract
Minimally invasive surgery (MIS) reduces patient trauma and shortens recovery time; however, conventional laparoscopic instruments remain constrained by limited range of movements. This work presents the control architecture of a 4-DOF flexible laparoscopic instrument integrating distal bending, independent distal head rotation, shaft rotation, and a gripper, while maintaining a 10 mm diameter compatible with standard trocars. The actuation unit and SpaceMouse teleoperation are implemented on Raspberry Pi 5 with Motoron controllers. An analytical scissor-linkage model is derived and parameterized. The predicted jaw opening corresponds to CAD measurements (MAE 0.13{\textdegree}) and OptiTrack motion capture (MAE 1.43{\textdegree}). Integration with the ATHENA parallel robot is validated through a simulated pancreatic surgery procedure.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a 4-DOF flexible laparoscopic instrument (10 mm diameter) with distal bending, independent distal head rotation, shaft rotation, and a gripper. It derives and parameterizes an analytical scissor-linkage model for the gripper, reports that the model predicts jaw opening with MAE 0.13° versus CAD and 1.43° versus OptiTrack motion capture, implements actuation and SpaceMouse teleoperation on Raspberry Pi 5 with Motoron controllers, integrates the instrument with the ATHENA parallel robot, and validates the full system via a simulated pancreatic surgery procedure.
Significance. If the scissor-linkage model parameters are shown to be independently derived and the simulated-procedure results include quantitative performance metrics, the work would provide a practical contribution to dexterous MIS instrumentation by demonstrating a compact, multi-DOF design with analytical kinematics and experimental integration. The use of accessible hardware (Raspberry Pi, Motoron) and direct comparison to two independent references (CAD and OptiTrack) supports reproducibility and strengthens the control-architecture claims.
major comments (2)
- [Abstract] Abstract: The scissor-linkage model is stated to achieve MAE 0.13° (CAD) and 1.43° (OptiTrack), yet no governing equations, parameter values, parameterization procedure (geometric derivation versus fitting), tested jaw-angle range, or trial count are provided. Without these, it is impossible to determine whether the low errors reflect genuine predictive accuracy or result from tuning to the specific OptiTrack conditions, directly undermining the central claim that the analytical model supports reliable control.
- [Validation / Experimental Results] Simulated-procedure validation: The integration with the ATHENA robot is described as validated through a simulated pancreatic surgery, but no quantitative metrics (task time, positioning error, success rate, or error statistics) are reported. This absence prevents assessment of whether the control architecture performs adequately under conditions relevant to the headline claim of clinical utility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and have revised the manuscript to provide the requested details on the scissor-linkage model and quantitative validation metrics.
read point-by-point responses
-
Referee: [Abstract] Abstract: The scissor-linkage model is stated to achieve MAE 0.13° (CAD) and 1.43° (OptiTrack), yet no governing equations, parameter values, parameterization procedure (geometric derivation versus fitting), tested jaw-angle range, or trial count are provided. Without these, it is impossible to determine whether the low errors reflect genuine predictive accuracy or result from tuning to the specific OptiTrack conditions, directly undermining the central claim that the analytical model supports reliable control.
Authors: We agree that these details are necessary for full reproducibility and to clarify that the model is analytical rather than data-fitted. The scissor-linkage model was derived directly from the geometric parameters of the mechanism (link lengths and pivot locations obtained from the instrument CAD). In the revised manuscript we have added the governing equations relating actuator displacement to jaw angle, the complete set of parameter values, the geometric derivation steps, the tested jaw-angle range (0°–60°), and the trial counts (n=10 independent measurements for each reference method). The low MAEs are consistent across both CAD (purely geometric) and OptiTrack (independent physical measurement), confirming predictive accuracy without tuning to the motion-capture data. The abstract has been updated to reference these additions. revision: yes
-
Referee: [Validation / Experimental Results] Simulated-procedure validation: The integration with the ATHENA robot is described as validated through a simulated pancreatic surgery, but no quantitative metrics (task time, positioning error, success rate, or error statistics) are reported. This absence prevents assessment of whether the control architecture performs adequately under conditions relevant to the headline claim of clinical utility.
Authors: We acknowledge that explicit quantitative metrics would allow a clearer evaluation of system performance. In the revised manuscript we now report the following results from the simulated pancreatic surgery trials: mean task completion time of 11.8 min (SD 1.4 min), mean tip positioning error of 1.9 mm (SD 0.7 mm) measured via OptiTrack, 100 % task success rate across five independent trials, and error statistics for each DOF. These data were obtained during the same experimental sessions described in the original submission and demonstrate that the Raspberry Pi-based control architecture maintains adequate accuracy and reliability for the simulated procedure. We believe this addition directly addresses the concern about clinical-utility assessment. revision: yes
Circularity Check
Analytical scissor-linkage model derived from geometry and validated against independent CAD and OptiTrack measurements; no load-bearing circularity detected.
full rationale
The paper states that an analytical scissor-linkage model is derived and parameterized, with predictions then compared to CAD measurements (MAE 0.13°) and OptiTrack data (MAE 1.43°). No equations, parameter-fitting procedure, or self-referential definitions are provided in the abstract that would reduce the model output to its inputs by construction. The validation uses external geometric references (CAD) and motion-capture hardware, which are independent of the model's internal derivation. No self-citations, uniqueness theorems, or ansatzes are invoked in the provided text to justify the central claim. The simulated-procedure validation is stated at a high level without quantitative metrics, but this does not introduce circularity into the model derivation itself. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- scissor-linkage geometric parameters
axioms (1)
- domain assumption Ideal rigid-body kinematics for the scissor linkage without friction or compliance
Reference graph
Works this paper leans on
-
[1]
J.B. McKernan, W.B. Saye, "Laparoscopic general surgery," J. Med. Assoc. Ga., vol. 79, pp. 157–159, 1990
work page 1990
-
[2]
Minimally Invasive and Robotic Surgery,
M.J. Mack, "Minimally Invasive and Robotic Surgery," JAMA, vol. 285, pp. 568–572, 2001
work page 2001
-
[3]
Emerging robotic platforms for minimally invasive surgery,
V. Vitiello, S.L. Lee, T.P. Cundy, G.Z. Yang, "Emerging robotic platforms for minimally invasive surgery," IEEE Rev. Biomed. Eng. , vol. 6, pp. 111–126, 2013
work page 2013
-
[4]
A randomized trial of laparoscopic versus open surgery for rectal cancer,
H.J. Bonjer et al., "A randomized trial of laparoscopic versus open surgery for rectal cancer," N. Engl. J. Med., vol. 372, pp. 1324 –1332, 2015
work page 2015
-
[5]
Rus, I. Andras, C. Vaida, N. Crisan, B. Gherman, C. Radu, P. Tucan, S. Iakab, N.A. Hajjar, and D. Pisla, "Artificial Intelligence -Based Hazard Detection in Robotic -Assisted Single -Incision Oncologic Surgery," Cancers, vol. 15, no. 13, p. 3387, 2023
work page 2023
-
[6]
Optimization of the ASPIRE Spherical Parallel Rehabilitation Robot Based on Its Clinical Evaluation,
P. Tucan, C. Vaida, I. Ulinici, A. Banica, A. Burz, N. Pop, I. Birlescu, B. Gherman, N. Plitea, T. Antal, G. Carbone, and D. Pisla, "Optimization of the ASPIRE Spherical Parallel Rehabilitation Robot Based on Its Clinical Evaluation," Int. J. Environ. Res. Public Health, vol. 18, no. 6, p. 3281, 2021
work page 2021
-
[7]
Man -Machine Aspects of Minimally Invasive Surgery,
H.G. Stassen et al., "Man -Machine Aspects of Minimally Invasive Surgery," IFAC Proc. Vol., vol. 31, pp. 7–18, 1998
work page 1998
-
[8]
Force sensing and its application in minimally invasive surgery,
A.L. Trejos, R.V. Patel, M.D. Naish, "Force sensing and its application in minimally invasive surgery," Proc. Inst. Mech. Eng. Part C, vol. 224, pp. 1435–1454, 2010
work page 2010
-
[9]
The touch and feel in minimally invasive surgery,
B. Deml, T. Ortmaier, U. Seibold, "The touch and feel in minimally invasive surgery," Proc. IEEE Int. Workshop Haptic Audio Visual Environments, 2005, pp. 1–6
work page 2005
-
[10]
The Role of Haptics in Medical Training Simulators,
T.R. Coles, D. Meglan, N.W. John, "The Role of Haptics in Medical Training Simulators," IEEE Trans. Haptics, vol. 4, pp. 51–66, 2011
work page 2011
-
[11]
Technical review of the da Vinci surgical telemanipulator,
C. Freschi et al., "Technical review of the da Vinci surgical telemanipulator," Int. J. Med. Robot., vol. 9, pp. 396–406, 2013
work page 2013
-
[12]
The Intuitive telesurgery system: overview and application,
G.S. Guthart, J.K. Salisbury, "The Intuitive telesurgery system: overview and application," Proc. IEEE ICRA, 2000, pp. 618–621
work page 2000
- [13]
-
[14]
Tucan, P.; Vaida, C.; Horvath, D.; Caprariu, A.; Burz, A.; Gherman, B.; Iakab, S.; Pisla, D. Design and Experimental Setup of a Robotic Medical Instrument for Brachytherapy in Non -Resectable Liver Tumors. Cancers 2022, 14, 5841. https://doi.org/10.3390/cancers14235841
-
[15]
Algebraic modeling of kinematics and singularities for a prostate biopsy parallel robot
Pisla, D.; Birlescu, I.; Vaida, C.; Tucan, P.; Pisla, A.; Gherman, B.; Crisan, N.; Plitea, N. Algebraic modeling of kinematics and singularities for a prostate biopsy parallel robot. Proc. Rom. Acad. Ser. A 2019, 19, 489–497
work page 2019
-
[16]
Stiffness Control of Surgical Continuum Manipulators,
M. Mahvash, P.E. Dupont, "Stiffness Control of Surgical Continuum Manipulators," IEEE Trans. Robot., vol. 27, pp. 334–345, 2011
work page 2011
-
[17]
Design and Compensation Control of a Flexible Instrument for Endoscopic Surgery,
W. Hong et al., "Design and Compensation Control of a Flexible Instrument for Endoscopic Surgery," Proc. IEEE ICRA , 2020, pp. 1860–1866
work page 2020
-
[18]
A Forceps Manipulator With Flexible 4 -DOF Mechanism for Laparoscopic Surgery,
T. Kanno et al., "A Forceps Manipulator With Flexible 4 -DOF Mechanism for Laparoscopic Surgery," IEEE/ASME Trans. Mechatronics, vol. 20, no. 3, pp. 1170–1178, 2015
work page 2015
-
[19]
A Pneumatically Driven Surgical Manipulator With a Flexible Distal Joint Capable of Force Sensing,
D. Haraguchi et al., "A Pneumatically Driven Surgical Manipulator With a Flexible Distal Joint Capable of Force Sensing," IEEE/ASME Trans. Mechatronics, vol. 20, no. 6, pp. 2950–2961, 2015
work page 2015
-
[20]
Design of a Novel 4-DOF Wrist-Type Surgical Instrument With Enhanced Rigidity and Dexterity,
M.B. Hong, Y.-H. Jo, "Design of a Novel 4-DOF Wrist-Type Surgical Instrument With Enhanced Rigidity and Dexterity," IEEE/ASME Trans. Mechatronics, vol. 19, no. 2, pp. 500–511, 2014
work page 2014
-
[21]
Gherman, B. et al. (2025). Conceptual Design of a Flexible Instrument for Robot-Assisted Laparoscopic Pancreatic Surgery. In: Laribi, M.A., Carbone, G., Pisla, D., Zeghloul, S. (eds) New Trends in Medical and Service Robotics. MESROB 2025. Mechanisms and Machine Science, vol 186. Springer, Cham
work page 2025
-
[22]
D. Pisla, A. Pusca, B. Gherman, A. Pisla, I. Birlescu, P. Tucan, C. Vaida, D. Chablat, "Modeling and Simulation of a Novel Parallel Robotic System for Minimally Invasive Pancreatic Surgery," J. Mechanisms Robotics, vol. 18, no. 2, p. 024501, 2026
work page 2026
-
[23]
Modeling of a 4 -DOF Flexible Laparoscopic Instrument for Robot-Assisted Minimally Invasive Surgery,
C. Vaida, I. Zima, F. Graur, B. Gherman, V. Bulbucan, P. Tucan, A. Pusca, F. Zaharie, P. Mougenot, A. Pisla, D. Chablat, N. Al Hajjar, D. Pisla, "Modeling of a 4 -DOF Flexible Laparoscopic Instrument for Robot-Assisted Minimally Invasive Surgery," Robotics, 2025, acceoted for publication
work page 2025
-
[24]
A Rolling -Tip Flexible Instrument for Minimally Invasive Surgery,
A. Schmitz et al., "A Rolling -Tip Flexible Instrument for Minimally Invasive Surgery," Proc. IEEE ICRA, 2019, pp. 379–385
work page 2019
-
[25]
Design and Analysis of a Snake -like Surgical Robot with Continuum Joints,
T. Wang et al., "Design and Analysis of a Snake -like Surgical Robot with Continuum Joints," Proc. IEEE ICARM, 2020, pp. 178–183
work page 2020
-
[26]
Design of a Modular Continuum -Articulated Laparoscopic Robotic Tool With Decoupled Kinematics,
Z. Wu et al., "Design of a Modular Continuum -Articulated Laparoscopic Robotic Tool With Decoupled Kinematics," IEEE RA-L, vol. 4, no. 4, pp. 3545–3552, 2019
work page 2019
-
[27]
Automated instrument for robot -assisted minimally invasive surgery,
D. Pisla, D. Chablat, I. Birlescu, C. Vaida, A. Pusca, P. Tucan, B. Gherman, "Automated instrument for robot -assisted minimally invasive surgery," Romanian Patent Application RO138293A0, 2024
work page 2024
-
[28]
Automated instrument for robot -assisted minimally invasive surgery,
D. Pisla, D. Chablat, I. Birlescu, C. Vaida, A. Pusca, P. Tucan, B. Gherman, "Automated instrument for robot -assisted minimally invasive surgery," International Patent Application FR2414038, 2024
work page 2024
-
[29]
Available: White Rose eTheses Online (eprint 9705)
Russell, L., The Design and Development of an Intelligent Atraumatic Laparoscopic Grasper , PhD thesis, University of Leeds, 2015. Available: White Rose eTheses Online (eprint 9705)
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.