On-board Telemetry Monitoring in Autonomous Satellites: Challenges and Opportunities
Pith reviewed 2026-05-10 17:37 UTC · model grok-4.3
The pith
A framework derives low-dimensional peepholes from neural activations to add semantic interpretability to onboard satellite anomaly detection with little extra cost.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
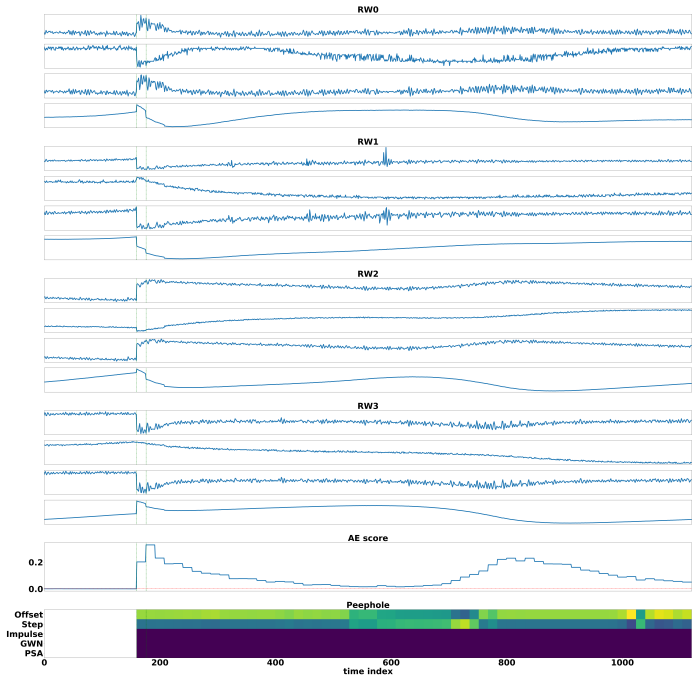
The central claim is that peepholes derived from intermediate neural activations in a convolutional autoencoder applied to reaction-wheel telemetry yield low-dimensional, semantically annotated encodings that enable the identification and localization of anomalies while supporting bias detection and requiring only a marginal increase in computational resources for onboard feasibility.
What carries the argument
Peepholes: low-dimensional, semantically annotated encodings derived from intermediate neural activations of a convolutional autoencoder, which supply the interpretable indicators for anomaly analysis.
Load-bearing premise
That peepholes extracted from intermediate activations will reliably yield semantically meaningful and actionable indicators for anomaly identification and localization on actual reaction-wheel telemetry data.
What would settle it
A controlled evaluation on real satellite telemetry containing documented anomalies where the resulting peephole indicators fail to distinguish or semantically match the known fault types.
Figures




read the original abstract
The increasing autonomy of spacecraft demands fault-detection systems that are both reliable and explainable. This work addresses eXplainable Artificial Intelligence for onboard Fault Detection, Isolation and Recovery within the Attitude and Orbit Control Subsystem by introducing a framework that enhances interpretability in neural anomaly detectors. We propose a method to derive low-dimensional, semantically annotated encodings from intermediate neural activations, called peepholes. Applied to a convolutional autoencoder, the framework produces interpretable indicators that enable the identification and localization of anomalies in reaction-wheel telemetry. Peepholes analysis further reveals bias detection and supports fault localization. The proposed framework enables the semantic characterization of detected anomalies while requiring only a marginal increase in computational resources, thus supporting its feasibility for on-board deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a framework for eXplainable AI in onboard fault detection, isolation, and recovery for satellite attitude and orbit control subsystems. It introduces 'peepholes' as low-dimensional, semantically annotated encodings derived from intermediate activations of a convolutional autoencoder applied to reaction-wheel telemetry. The approach is claimed to produce interpretable indicators for anomaly identification, localization, and bias detection while incurring only marginal computational overhead, thereby supporting feasibility for onboard deployment.
Significance. If validated, the peephole method could offer a practical route to adding semantic interpretability to neural anomaly detectors in resource-limited space systems without prohibitive compute costs, addressing a genuine need in autonomous spacecraft operations. The work highlights an important intersection of XAI and onboard telemetry monitoring. However, the absence of any empirical results means the significance is currently prospective rather than demonstrated.
major comments (2)
- Abstract: The central claim that peepholes enable semantic characterization of anomalies (including bias detection and fault localization) with only marginal computational overhead is presented without any quantitative results, validation on real reaction-wheel telemetry data, error analysis, or baseline comparisons. This directly undermines assessment of the onboard feasibility argument.
- Abstract: The manuscript provides no details on how semantic annotations are generated for the peepholes or on the datasets and metrics used to confirm that intermediate conv-autoencoder activations yield actionable, fault-specific semantics rather than generic activation patterns. This leaves the core assumption untested and load-bearing for the interpretability benefit.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for stronger empirical grounding and methodological transparency in our proposal. The comments correctly identify that the current manuscript presents the peephole framework at a conceptual level without supporting experiments or detailed validation procedures. We will revise the manuscript to address these gaps while preserving the core contribution as a framework for interpretable onboard anomaly detection.
read point-by-point responses
-
Referee: Abstract: The central claim that peepholes enable semantic characterization of anomalies (including bias detection and fault localization) with only marginal computational overhead is presented without any quantitative results, validation on real reaction-wheel telemetry data, error analysis, or baseline comparisons. This directly undermines assessment of the onboard feasibility argument.
Authors: We agree that the abstract states the feasibility claims without quantitative backing, and the manuscript as submitted contains no empirical results, overhead benchmarks, or baseline comparisons. This is because the work was positioned as a conceptual framework introduction rather than a full experimental study. In the revised version we will add an experimental section reporting preliminary results on simulated reaction-wheel telemetry, including measured computational overhead, anomaly detection performance metrics, and comparisons against standard autoencoder baselines to substantiate the onboard feasibility argument. revision: yes
-
Referee: Abstract: The manuscript provides no details on how semantic annotations are generated for the peepholes or on the datasets and metrics used to confirm that intermediate conv-autoencoder activations yield actionable, fault-specific semantics rather than generic activation patterns. This leaves the core assumption untested and load-bearing for the interpretability benefit.
Authors: The semantic annotations are conceptually obtained by mapping low-dimensional peephole encodings to known physical fault signatures (e.g., reaction-wheel speed bias or torque anomalies) using domain knowledge of attitude control telemetry. However, the submitted manuscript indeed omits an explicit description of the annotation procedure, the datasets employed, and any quantitative metrics confirming semantic specificity. We will revise the methods section to provide a step-by-step account of the annotation generation process, specify the telemetry datasets (simulated and any available public sources), and introduce evaluation metrics that demonstrate the peepholes capture fault-specific rather than generic patterns. revision: yes
Circularity Check
No circularity: proposed peephole framework is a methodological introduction without self-referential derivations
full rationale
The manuscript introduces a framework for extracting low-dimensional peepholes from intermediate activations of a convolutional autoencoder applied to reaction-wheel telemetry, with the goal of improving semantic interpretability for anomaly detection. No equations, parameter-fitting steps, or derivation chains are present that reduce a claimed result to its own inputs by construction. The text does not invoke self-citations as load-bearing uniqueness theorems, smuggle ansatzes via prior work, or rename known empirical patterns as new predictions. Claims about marginal computational overhead and semantic characterization are presented as properties of the proposed method rather than tautological outputs, leaving the work self-contained for external empirical validation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Neural network activations contain extractable semantic information relevant to anomaly detection in telemetry.
- domain assumption A marginal increase in computational resources is acceptable for onboard satellite deployment.
invented entities (1)
-
peepholes
no independent evidence
Reference graph
Works this paper leans on
-
[1]
ESA Earth Observation Science Strategy
European Space Agency (ESA). ESA Earth Observation Science Strategy. Technical report, European Space Agency (ESA), sep 2024
work page 2024
-
[2]
National Aeronautics and Space Administration (NASA). Earth Science to Action. Technical report, National Aeronautics and Space Administration (NASA), 2024
work page 2024
-
[3]
Pelican-2 & 36 SuperDoves Arrived in Vandenberg, California For Launch, December 2024
Planet Labs PBC. Pelican-2 & 36 SuperDoves Arrived in Vandenberg, California For Launch, December 2024. Planet Pulse news article; describes Pelican-2 equipped with NVIDIA Jetson for edge AI
work page 2024
-
[4]
Towards the use of artifi- cialintelligenceontheedgeinspacesystems: Challengesandopportunities
Gianluca Furano, Gabriele Meoni, Aubrey Dunne, David Moloney, Veronique Ferlet-Cavrois, Antonis Tavoularis, Jonathan Byrne, Léonie Buckley, Mihalis Psarakis, Kay-Obbe Voss, et al. Towards the use of artifi- cialintelligenceontheedgeinspacesystems: Challengesandopportunities. IEEE Aerospace and Electronic Systems Magazine, 35(12):44–56, 2020
work page 2020
-
[5]
Gianluca Giuffrida, Luca Fanucci, Gabriele Meoni, Matej Batic, Leonie Buckley, Aubrey Dunne, Chris Van Dijk, Marco Esposito, John Hefele, Nathan Vercruyssen, Gianluca Furano, Massimiliano Pastena, and Josef Aschbacher. TheΦ-Sat-1 Mission: The First On-Board Deep Neural Net- work Demonstrator for Satellite Earth Observation.IEEE Transactions on Geoscience ...
work page 2022
-
[6]
OPS-SAT Spacecraft Autonomy with TensorFlow Lite, Unsupervised Learning, and Online Machine Learning
Georges Labreche, David Evans, Dominik Marszk, Tom Mladenov, Vasund- hara Shiradhonkar, Tanguy Soto, and Vladimir Zelenevskiy. OPS-SAT Spacecraft Autonomy with TensorFlow Lite, Unsupervised Learning, and Online Machine Learning. In2022 IEEE Aerospace Conference (AERO), volume 2022-March, pages 1–17, 2022. Cited by: 26
work page 2022
-
[7]
Gonzalo Mateo-Garcia, Josh Veitch-Michaelis, Cormac Purcell, Nicolas Longepe, Simon Reid, Alice Anlind, Fredrik Bruhn, James Parr, and Pierre Philippe Mathieu. In-orbit demonstration of a re-trainable machine learning payload for processing optical imagery.Scientific Reports, 13(1),
-
[8]
Cited by: 18; All Open Access, Gold Open Access. 13
-
[9]
Operationalizing explainable AI in the EU regulatory ecosystem.IEEE Intelligent Systems, 2024
Luca Nannini, Jose Maria Alonso-Moral, Alejandro Catalá, Manuel Lama, and Senén Barro. Operationalizing explainable AI in the EU regulatory ecosystem.IEEE Intelligent Systems, 2024
work page 2024
-
[10]
Leveson.Engineering a Safer World: Systems Thinking Applied to Safety
Nancy G. Leveson.Engineering a Safer World: Systems Thinking Applied to Safety. MIT Press, Cambridge, MA, 2011
work page 2011
-
[11]
Xavier Olive. FDI (R) for satellites: How to deal with high availability and robustness in the space domain?International Journal of Applied Mathematics and Computer Science, 22(1):99–107, 2012
work page 2012
-
[12]
Control moment gyroscope anomaly detection based on sparse autoencoder
Yuxue Zheng, Haijun Dou, Hutao Cui, and Minqiang Xu. Control moment gyroscope anomaly detection based on sparse autoencoder. InJournal of Physics: Conference Series, number 1, page 012061. IOP Publishing, 2024
work page 2024
-
[13]
Kuan Zhang, Shuchen Wang, Saijin Wang, and Qizhi Xu. Anomaly detec- tion of control moment gyroscope based on working condition classification and transfer learning.Applied Sciences, 13(7):4259, 2023
work page 2023
-
[14]
Lukas Ruff, Jacob R. Kauffmann, Robert A. Vandermeulen, Grégoire Mon- tavon, Wojciech Samek, Marius Kloft, Thomas G. Dietterich, and Klaus- Robert Müller. A Unifying Review of Deep and Shallow Anomaly Detec- tion.Proceedings of the IEEE, 109(5):756–795, 2021
work page 2021
-
[15]
Marco Tulio Ribeiro, Sameer Singh, and Carlos Guestrin. “Why should I trust you?” Explaining the predictions of any classifier. InProceedings of the 22nd ACM SIGKDD international conference on knowledge discovery and data mining, pages 1135–1144, 2016
work page 2016
-
[16]
Mythos of Model Interpretability.Queue, 16(3):31–57, 2018
Zachary C Lipton. Mythos of Model Interpretability.Queue, 16(3):31–57, 2018
work page 2018
-
[17]
Number NIST.IR.8312 in NIST Technical Series Publications
Andrew Schumann.Four Principles of Explainable Artificial Intelligence. Number NIST.IR.8312 in NIST Technical Series Publications. National In- stitute of Standards and Technology, 2021
work page 2021
-
[18]
Sara Cuéllar Carrillo, Matilde Santos Peñas, Fernando Alonso, Ernesto Fabregas, and Gonzalo Farias. Explainable anomaly detection in spacecraft telemetry.Engineering Applications of Artificial Intelligence, 133:1–15, 02 2024
work page 2024
-
[19]
Diyin Tang, Mengtong Gong, Limei Tian, Jinsong Yu, Jiyang Zhang, and Qiang Zhang. Health indicator construction of high-speed rotating bearings in aerospace CMG based on physics-inspired machine-learning approach. IEEE Transactions on Instrumentation and Measurement, 71:1–11, 2022
work page 2022
-
[20]
Innovative ml-based methods for automated on- board spacecraft anomaly detection
Carlo Ciancarelli, Eleonora Mariotti, Francesco Corallo, Salvatore Cognetta, Livia Manovi, Alex Marchioni, Mauro Mangia, Riccardo Rovatti, and Gianluca Furano. Innovative ml-based methods for automated on- board spacecraft anomaly detection. InInternational Conference on Ap- plied Intelligence and Informatics, pages 213–228. Springer, 2022. 14
work page 2022
-
[21]
JunfuChen, DechangPi, ZhiyuanWu, XiaodongZhao, YuePan, andQiang Zhang. Imbalanced satellite telemetry data anomaly detection model based on Bayesian LSTM.Acta Astronautica, 180:232–242, 2021
work page 2021
-
[22]
Yuandi Wu, Brett Sicard, and Stephen Andrew Gadsden. Physics-informed machine learning: A comprehensive review on applications in anomaly detection and condition monitoring.Expert Systems with Applications, 255:124678, 2024
work page 2024
-
[23]
Shmuel Friedland and Anatoli Torokhti. Generalized Rank-Constrained Matrix Approximations.SIAM Journal on Matrix Analysis and Applica- tions, 29(2):656–659, 2007
work page 2007
-
[24]
A. P. Dempster, N. M. Laird, and D. B. Rubin. Maximum Likelihood from Incomplete Data Via the EM Algorithm.Journal of the Royal Statistical Society: Series B (Methodological), 39(1):1–22, 12 2018
work page 2018
-
[25]
Yu han Liu and Sercan O. Arik. Explaining Deep Neural Networks using Unsupervised Clustering, 2020
work page 2020
-
[26]
Andriy Enttsel, Silvia Onofri, Alex Marchioni, Mauro Mangia, Gianluca Setti, and Riccardo Rovatti. A General Framework for the Assessment of Detectors of Anomalies in Time Series.IEEE Transactions on Industrial Informatics, 20(10):12051–12061, 2024
work page 2024
-
[27]
An introduction to ROC analysis.Pattern Recognition Let- ters, 27(8):861–874, 2006
Tom Fawcett. An introduction to ROC analysis.Pattern Recognition Let- ters, 27(8):861–874, 2006. ROC Analysis in Pattern Recognition. 15
work page 2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.