Ro-SLM: Onboard Small Language Models for Robot Task Planning and Operation Code Generation
Pith reviewed 2026-05-10 16:14 UTC · model grok-4.3
The pith
Fine-tuned small language models can perform robot task planning and code generation at levels approaching large language models for onboard UAV deployment.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
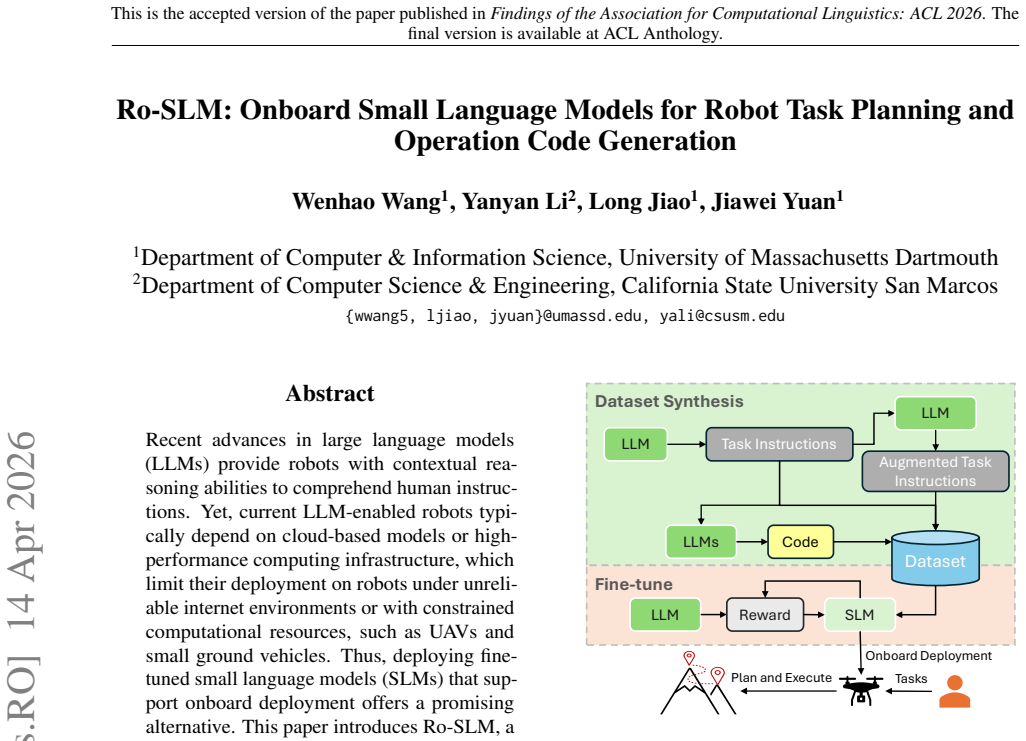
Ro-SLM is a framework that distills LLMs' knowledge and reasoning into SLMs to enable reliable onboard robot operation. It begins with LLM-driven synthesis of diverse task instructions, produces corresponding ground truth code with minimal human assistance, and augments instructions into real-world scenarios. The SLM is then fine-tuned on this dataset where the LLM acts as a reward function to guide training, yielding UAV task performance that approaches the original LLM.
What carries the argument
Ro-SLM framework that synthesizes LLM-generated task instructions and code then uses LLM rewards to fine-tune SLMs for robot operation.
If this is right
- SLMs become capable of supporting onboard robotic task planning without cloud infrastructure.
- Robots with limited compute can execute code generation for operations like UAV missions.
- Performance on UAV tasks improves from incapable to near the level of the source large model.
- Deployment becomes feasible in environments with unreliable internet connectivity.
Where Pith is reading between the lines
- The approach might extend to other robot platforms if the synthetic data generation process is adapted to their specific constraints.
- Real-world testing would be needed to check whether errors in generated code lead to safety incidents during physical operation.
- Similar distillation techniques could apply to other robotic capabilities beyond planning, such as perception or control.
Load-bearing premise
That LLM-generated synthetic instructions, code, and reward signals accurately represent real-world robot tasks so the fine-tuned SLM generalizes reliably in actual deployments.
What would settle it
Running the fine-tuned SLM on physical UAVs across varied real tasks and measuring the rate of incorrect or unsafe code generation compared to the source LLM.
Figures

read the original abstract
Recent advances in large language models (LLMs) provide robots with contextual reasoning abilities to comprehend human instructions. Yet, current LLM-enabled robots typically depend on cloud-based models or high-performance computing infrastructure, which limit their deployment on robots under unreliable internet environments or with constrained computational resources, such as UAVs and small ground vehicles. Thus, deploying fine-tuned small language models (SLMs) that support onboard deployment offers a promising alternative. This paper introduces Ro-SLM, a framework that enables reliable SLM-driven robot operation by distilling LLMs' knowledge and reasoning. Ro-SLM starts from dataset synthesis by leveraging LLMs to generate diverse task instructions, produce corresponding ground truth code with minimal human assistance, and augment instructions into real-world application scenarios. Ro-SLM is then fine-tuned with the dataset, in which LLM serves as a reward function to guide the training. Extensive experiments on UAV operation tasks demonstrate that Ro-SLM improves the performance of SLM from being incapable of supporting robotic task planning and code generation to achieving performance that approaches LLM.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Ro-SLM, a framework for distilling knowledge from large language models (LLMs) into small language models (SLMs) to enable onboard robot task planning and code generation. It describes a pipeline of LLM-driven dataset synthesis (generating diverse task instructions, ground-truth code with minimal human input, and scenario augmentations) followed by fine-tuning where the LLM acts as a reward function. The central claim is that this process allows SLMs, previously incapable of supporting robotic planning and code generation, to achieve performance approaching that of LLMs, as demonstrated in extensive experiments on UAV operation tasks.
Significance. If the empirical claims are substantiated with rigorous, reproducible metrics and real-world validation, the work could meaningfully advance practical deployment of language-model-based reasoning on edge robotic platforms such as UAVs and small ground vehicles. By reducing reliance on cloud-based LLMs and high-performance compute, it addresses a key barrier to reliable operation in connectivity-constrained or resource-limited environments.
major comments (2)
- [Abstract] Abstract: The claim that 'extensive experiments on UAV operation tasks demonstrate that Ro-SLM improves the performance of SLM from being incapable of supporting robotic task planning and code generation to achieving performance that approaches LLM' is presented without any quantitative metrics, baselines, success rates, error bars, or experimental details. This absence renders the central empirical claim unverifiable from the provided text.
- [Dataset Synthesis and Training] Dataset Synthesis and Training sections: The entire pipeline depends on LLM-generated synthetic instructions, code, and reward signals. This creates a closed synthetic distribution that may fail to capture real UAV dynamics, sensor noise, actuator delays, or environmental variation. No description of physical hardware trials, domain-randomized simulation, or out-of-distribution testing is supplied, leaving the generalization claim unsupported and at risk of overstatement.
minor comments (1)
- [Abstract] Abstract: The phrase 'with minimal human assistance' for ground-truth code generation is imprecise; the manuscript should specify the exact nature and extent of any human intervention required.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have made revisions to improve clarity and substantiation of our claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that 'extensive experiments on UAV operation tasks demonstrate that Ro-SLM improves the performance of SLM from being incapable of supporting robotic task planning and code generation to achieving performance that approaches LLM' is presented without any quantitative metrics, baselines, success rates, error bars, or experimental details. This absence renders the central empirical claim unverifiable from the provided text.
Authors: We agree that the abstract would benefit from quantitative support. In the revised manuscript, we have updated the abstract to explicitly include key metrics from our experiments, such as success rates for the base SLM, Ro-SLM, and LLM baselines, along with references to variability across runs. These additions make the central claim verifiable from the abstract while directing readers to the full experimental details and methodology in the Experiments section. revision: yes
-
Referee: [Dataset Synthesis and Training] Dataset Synthesis and Training sections: The entire pipeline depends on LLM-generated synthetic instructions, code, and reward signals. This creates a closed synthetic distribution that may fail to capture real UAV dynamics, sensor noise, actuator delays, or environmental variation. No description of physical hardware trials, domain-randomized simulation, or out-of-distribution testing is supplied, leaving the generalization claim unsupported and at risk of overstatement.
Authors: We acknowledge the validity of this concern regarding reliance on synthetic data. Our experiments were conducted in simulation; we have now added explicit descriptions of the simulation setup, including domain randomization for factors such as environmental variations where applicable, and details on out-of-distribution testing through scenario augmentations, with corresponding results in the Experiments section. We did not perform physical hardware trials in this work. We have added a Limitations section discussing the sim-to-real gap and outlining plans for future real-world validation to address potential overstatement of generalization. revision: partial
Circularity Check
No circularity: purely empirical distillation pipeline with no derivations or self-referential reductions
full rationale
The paper presents an empirical framework for distilling LLM knowledge into SLMs via synthetic dataset generation (instructions, code, scenarios) and LLM-guided reward during fine-tuning, followed by UAV task experiments. No equations, mathematical derivations, fitted parameters renamed as predictions, uniqueness theorems, or ansatzes appear in the provided text. The performance claim (SLM moving from incapable to approaching LLM) rests on experimental comparison rather than any self-definition or self-citation chain that reduces the result to its inputs. This is a standard knowledge-distillation setup whose validity is externally testable via hardware trials and does not collapse by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Large language models can generate diverse task instructions and corresponding ground-truth code with minimal human assistance
Reference graph
Works this paper leans on
-
[1]
Large language model-driven closed-loop uav operation with semantic observations.IEEE Internet of Things Journal, 13(7):14465–14476. Junjie Wen, Yichen Zhu, Jinming Li, Minjie Zhu, Zhibin Tang, Kun Wu, Zhiyuan Xu, Ning Liu, Ran Cheng, Chaomin Shen, Yaxin Peng, Feifei Feng, and Jian Tang. 2025. Tinyvla: Toward fast, data-efficient vision-language-action mo...
work page 2025
-
[2]
The drone tasks involve combinations of world frame movement, rotation, and the drone’s body frame movement
-
[3]
Do not add additional explanation with "()" in the task
The task description must be concise. Do not add additional explanation with "()" in the task
-
[4]
The task description must clearly state the coordinate system (world frame or drone’s body frame) for each movement ac- tion
-
[5]
The task description must clearly state the rotation direction, and the rotation angle must be divisible by 30
-
[8]
No more than 5 steps of actions in a task
-
[10]
Fly 3 meters up, then fly 5 meters down in the world frame
-
[11]
Rotate 180 degrees, then fly 5 meters forward in the drone’s body frame
-
[12]
Turn to face the local south, then fly 6 meters forward in the drone’s body frame
-
[13]
Your output should be tasks only
Fly the drone in the top-right direction at an angle of 60 degrees from the horizontal axis, in the YZ plane of the drone’s body frame for a distance of 5 meters. Your output should be tasks only. Please generate 110 tasks like examples and 12 tasks that fly the drone in XZ or YZ plane like example 4 in the drone’s body frame. System Prompt 2 Part A: You ...
-
[14]
The drone tasks involve combinations of movement and rotation
-
[15]
Do not add additional explanation with "()" in the task
The task description must be concise and clear. Do not add additional explanation with "()" in the task
-
[16]
The drone is going to fly a series of square patterns. The patterns involve flying forward, right, backward, and left; flying forward, left, forward, and right; symmet- ric; reverse; two or more squares; figure of 8
-
[17]
State the purpose, if the task requires a specified facing direction (align, opposite, perpendicular)
-
[18]
Move and rotate are the only two actions available for the drone
-
[19]
Movement distance should be an integer, the number should be larger than 2 meters and smaller than 10 meters
-
[20]
The task description should be in a hu- man tone. Here are four example tasks:
-
[21]
Take off and fly up 5 meters. You should fly in a square pattern with 5-meter sides by moving north, east, south, and west in the world axis. 2. Take off and fly up 5 me- ters. You will examine a square area. You should fly in a square pattern with 5-meter sides by moving forward, left, backward, and right. To examine the square area, the drone should ori...
-
[22]
You will examine a square area
Take off and fly up 5 meters. You will examine a square area. You should fly in a square pattern with 5-meter sides by mov- ing forward, right, backward, and left. To examine the square area, the drone should orientate perpendicular to the moving di- rection on each side of the square. Next, ascend another 5 meters and fly the square pattern in reverse or...
work page 2026
-
[23]
Fly in a square with 5-meter sides
Take off and fly up 5 meters. Fly in a square with 5-meter sides. The movement pattern should follow this sequence: for- ward, right, backward, and left in the world axis. Next, fly a second square that is sym- metric with respect to the X-axis in the XY plane. To examine the two square areas, the drone should orientate perpendicular to the moving directi...
-
[24]
Fly a figure of 8 on a flat, horizontal plane with each side of 5 meters
Take off and fly up 5 meters. Fly a figure of 8 on a flat, horizontal plane with each side of 5 meters. The left square is on your left-rear side, and the right square is on your right-front side. You should begin with the left square by flying left. The right square should start from moving north. Addition- ally, for the left square, the drone is oriente...
-
[25]
Make sure to state the coordinate sys- tem (world frame or drone’s body frame) for each movement action in your modified task
-
[26]
You must not add any additional actions
Your task must perform the same action as the task I gave you. You must not add any additional actions
-
[27]
You must not introduce misleading de- scriptions that could be interpreted as addi- tional actions
-
[28]
Your output should be human tone-like and should not use uncommon words
-
[29]
Fly 5 meters up, then fly 4 meters down
Must output your modified task in one paragraph. Here is an example: Query: "Fly 5 meters up, then fly 4 meters down." Answer: "Perform a vertical clearance check near a storage. In the world frame, ascend 5 meters to inspect the upper vent, then descend 4 meters in the world frame to position the drone near the mid-section for a closer look." This is the...
work page 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.