Modeling, Analysis and Activation of Planar Viscoelastically-combined Rimless Wheels
Pith reviewed 2026-05-10 15:06 UTC · model grok-4.3
The pith
Viscoelastically-combined rimless wheels produce stable passive gaits and can be activated for level walking.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The viscoelastically-combined rimless wheel, formed by two cross-shaped frames and eight viscoelastic elements, produces stable passive gaits in planar walking on slopes as confirmed by numerical simulation of the motion and collision equations, and the version with freely rotating two-link frames can be activated to generate a stable level gait.
What carries the argument
The viscoelastically-combined rimless wheel, in which two cross-shaped frames are linked by eight viscoelastic elements that store and release energy at each leg collision and stance phase to sustain a periodic gait without continuous actuation.
If this is right
- Both proposed designs achieve stable passive dynamic walking on inclined surfaces without motors.
- Activation of the rotating two-link frame variant produces a stable gait on flat ground.
- The motion and collision models allow prediction and tuning of gait properties such as step period and stability margin.
- The structures can function as the basis for energy-efficient walking support devices that rely primarily on passive dynamics.
Where Pith is reading between the lines
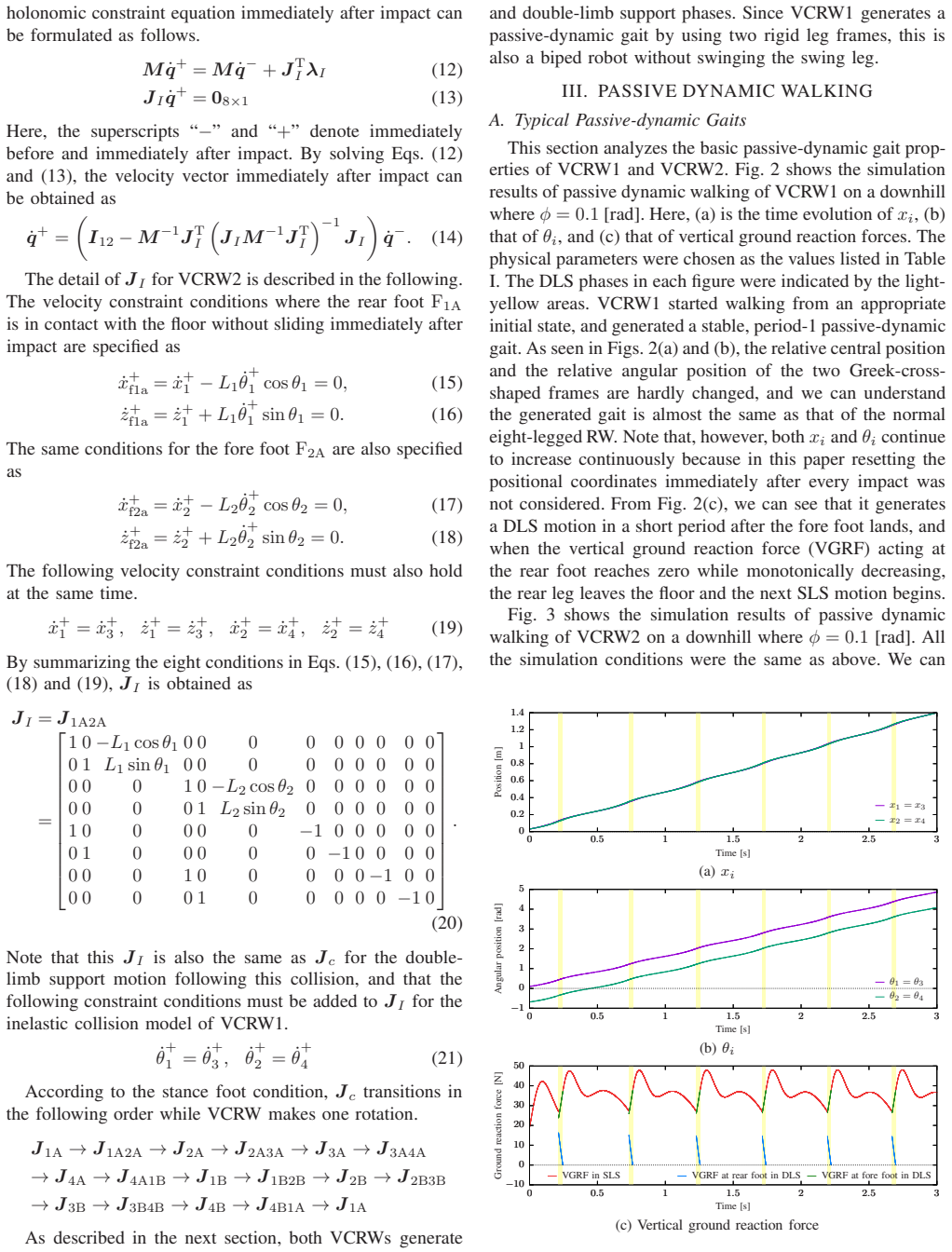
- The compliance from the viscoelastic elements may lower peak impact forces relative to rigid rimless wheels, which could extend component life in repeated use.
- The same linking approach could be applied to other passive legged mechanisms to improve stability margins without adding degrees of freedom or sensors.
- Hardware validation on physical prototypes would be required to check whether the simulated stability persists when unmodeled effects such as joint friction and ground compliance are present.
Load-bearing premise
The derived equations of motion, collision rules, and numerical simulations accurately capture the physical dynamics of the viscoelastic elements and frame interactions.
What would settle it
A physical prototype of the rotating-frame variant built and tested on a level surface with the proposed activation method that fails to sustain a stable periodic gait under realistic friction and material conditions.
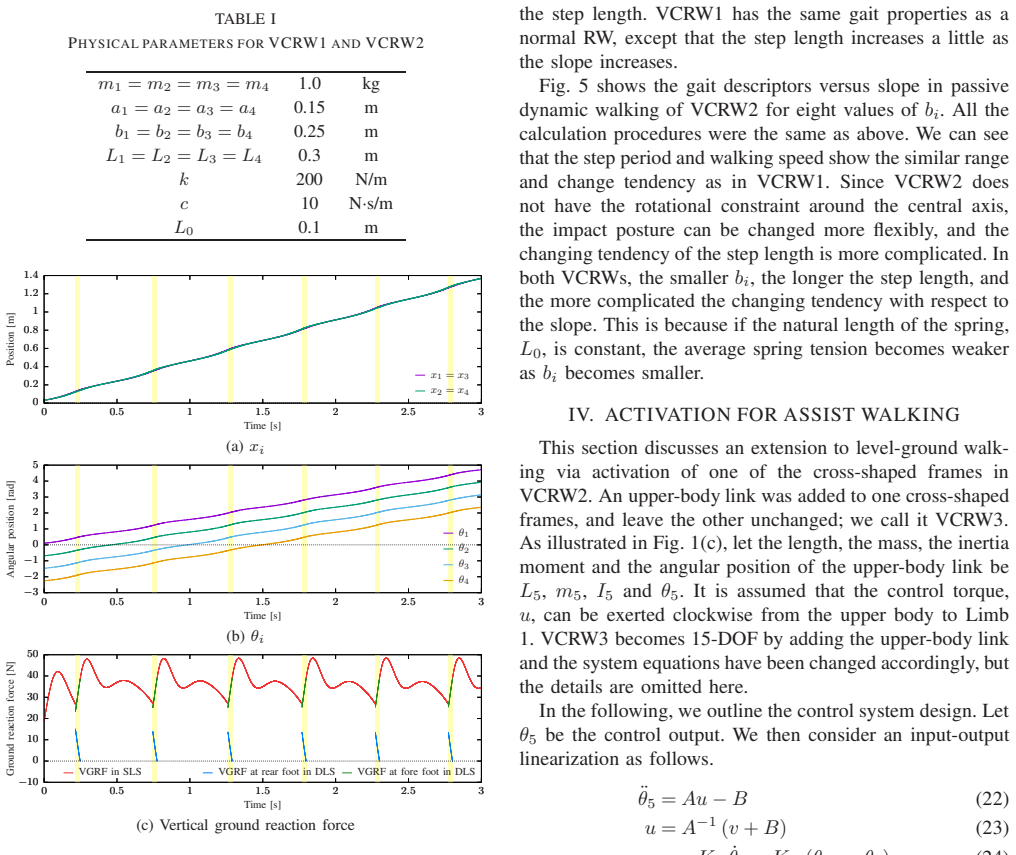
Figures
read the original abstract
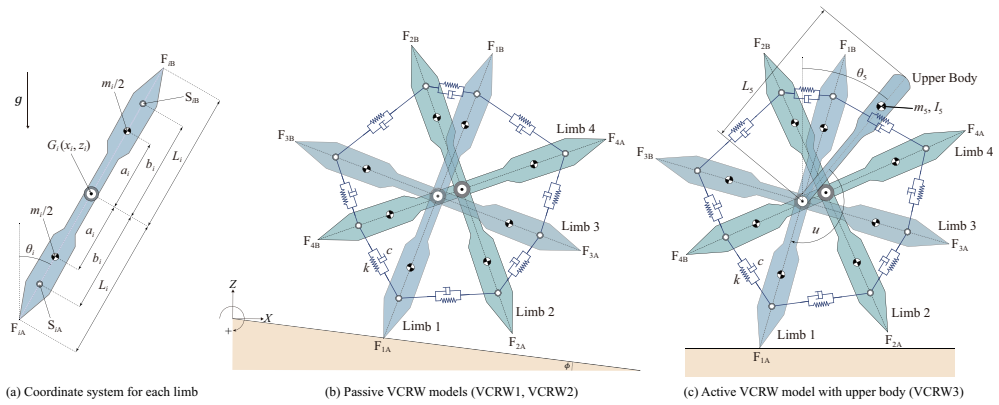
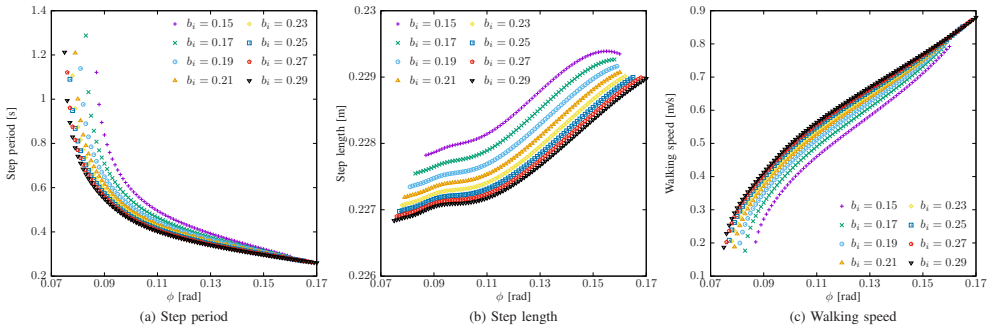
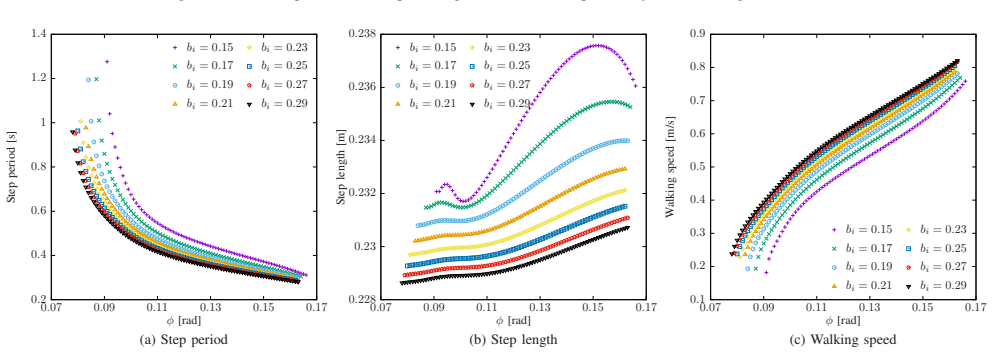
This paper proposes novel passive-dynamic walkers formed by two cross-shaped frames and eight viscoelastic elements. Since it is a combination of two four-legged rimless wheels via viscoelastic elements, we call it viscoelastically-combined rimless wheel (VCRW). Two types of VCRWs consisting of different cross-shaped frames are introduced; one is formed by combining two Greek-cross-shaped frames (VCRW1), and the other is formed by combining two-link cross-shaped frames that can rotate freely around the central axis (VCRW2). First, we describe the model assumptions and equations of motion and collision. Second, we numerically analyze the basic gait properties of passive dynamic walking. Furthermore, we consider an activation of VCRW2 for generating a stable level gait, and discuss the significance of the study as a novel walking support device.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes two novel passive-dynamic walkers called viscoelastically-combined rimless wheels (VCRW1 and VCRW2), formed by combining cross-shaped frames with viscoelastic elements. It derives the equations of motion and collision for these systems under rigid body and linear viscoelastic assumptions, numerically identifies periodic gaits for passive dynamic walking, assesses their stability using the eigenvalues of the Poincaré return map, and explores an activation strategy for VCRW2 to achieve stable walking on level ground, suggesting applications as walking support devices.
Significance. If the numerical results hold, this study introduces an innovative design for passive walkers that leverages viscoelastic coupling to achieve stable gaits, extending traditional rimless wheel models. The analysis of both passive and activated behaviors provides a foundation for energy-efficient locomotion mechanisms. A strength is the direct connection from modeling assumptions to stability conclusions via standard numerical methods (return-map eigenvalues), which supports reproducibility of the simulations in legged robotics.
minor comments (3)
- Abstract: The abstract outlines the contributions but omits quantitative results from the numerical analysis, such as gait stability metrics or periods; adding a brief mention of key findings would enhance its informativeness.
- Model section: The description of the viscoelastic elements could specify the exact form of the force law (e.g., F = -k*x - c*v) with the parameter values used in simulations for better reproducibility.
- Numerical analysis section: Figures illustrating the gait trajectories or return maps would benefit from higher resolution or additional annotations to clearly show the periodic orbits and eigenvalue locations.
Simulated Author's Rebuttal
We thank the referee for the detailed summary of our manuscript on viscoelastically-combined rimless wheels and for the positive assessment of its significance in extending passive dynamic walking models. The recommendation for minor revision is noted; we will incorporate any editorial improvements in the revised version.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper defines VCRW models from rigid frames and linear viscoelastic elements, derives equations of motion and collision directly from Newtonian mechanics and impact assumptions, then uses numerical integration to locate periodic gaits and computes return-map eigenvalues for stability. These steps are forward computations from stated assumptions with no parameter fitting to data, no self-referential definitions, and no load-bearing reliance on prior self-citations that would reduce the central claims to inputs. The reported stable passive gaits and activated level gait follow as numerical outcomes without circular reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Design and co ntrol of tensegrity robots for locomotion,
C. Paul, F. J. V alero-Cuevas and H. Lipson, “Design and co ntrol of tensegrity robots for locomotion,” IEEE Trans. on Robotics , V ol. 22, Iss. 5, pp. 944–957, 2006
work page 2006
-
[2]
System design and locomotion of SUPERball, an untethered tensegrity robot,
A. P . Sabelhaus, J. Bruce, K. Caluwaerts, P . Manovi, R. F. Firoozi, S. Dobi, A. M. Agogino and V . SunSpiral, “System design and locomotion of SUPERball, an untethered tensegrity robot,” Proc. of the IEEE Int. Conf. on Robotics and Automation , pp. 2867–2873, 2015
work page 2015
-
[3]
Force analytic method for rolling gaits of tensegrity robots,
W. Du, S. Ma, B. Li, M. Wang and S. Hirai, “Force analytic method for rolling gaits of tensegrity robots,” IEEE/ASME Trans. on Mechatronics, V ol. 21, Iss. 5, pp. 2249–2259, 2016
work page 2016
-
[4]
Dynamics and stability of a rimless spoke d wheel: a simple 2D system with impacts,
M. J. Coleman, “Dynamics and stability of a rimless spoke d wheel: a simple 2D system with impacts,” Dynamical Systems , V ol. 25, No. 2, pp. 215–238, 2010
work page 2010
-
[5]
T. McGeer, “Passive dynamic walking,” The Int. J. of Robotics Research, V ol. 9, Iss. 2, pp. 62–82, 1990
work page 1990
-
[6]
F. Asano, Y . Zheng and L. Li, “Modeling and motion analysi s of planar passive-dynamic walker with tensegrity structure formed b y four limbs and eight viscoelastic elements,” Proc. of the 24th Int. Conf. Series on Climbing and W alking Robots , pp. 242–254, 2021
work page 2021
-
[7]
Analysis of passive d ynamic gait of tensegrity robot,
Y . Zheng, F. Asano, L. Li and C. Y an, “Analysis of passive d ynamic gait of tensegrity robot,” Proc. of the 24th Int. Conf. Series on Climbing and W alking Robots, pp. 274–285, 2021
work page 2021
-
[8]
Mode ling and analysis of tensegrity robot for passive dynamic walkin g,
Y . Zheng, L. Li, F. Asano, C. Y an, X. Zhao and H. Chen, “Mode ling and analysis of tensegrity robot for passive dynamic walkin g,” Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems , pp. 2456–2461, 2021
work page 2021
-
[9]
H. Zhao, F. Asano and L. Li, “Indirectly controlled combi ned rimless wheel that consists of eight- and ten-legged wheels via entr ainment effect,” Proc. of the 3rd Int. Symp. on Swarm Behavior and Bio- Inspired Robotics, pp. 250–253, 2019
work page 2019
-
[10]
54 0 5 10 15 20 25 30 35 40 Step period [s] Number of steps
-
[11]
54 0 5 10 15 20 25 30 35 40 (a) Step period
-
[12]
226 0 5 10 15 20 25 30 35 40 Step length [m] Number of steps
-
[13]
226 0 5 10 15 20 25 30 35 40 (b) Step length
-
[14]
58 0 5 10 15 20 25 30 35 40 Walking speed [m/s] Number of steps
-
[15]
58 0 5 10 15 20 25 30 35 40 (c) Walking speed
-
[16]
11 0 5 10 15 20 25 30 35 40 Specific resistance [-] Number of steps
-
[17]
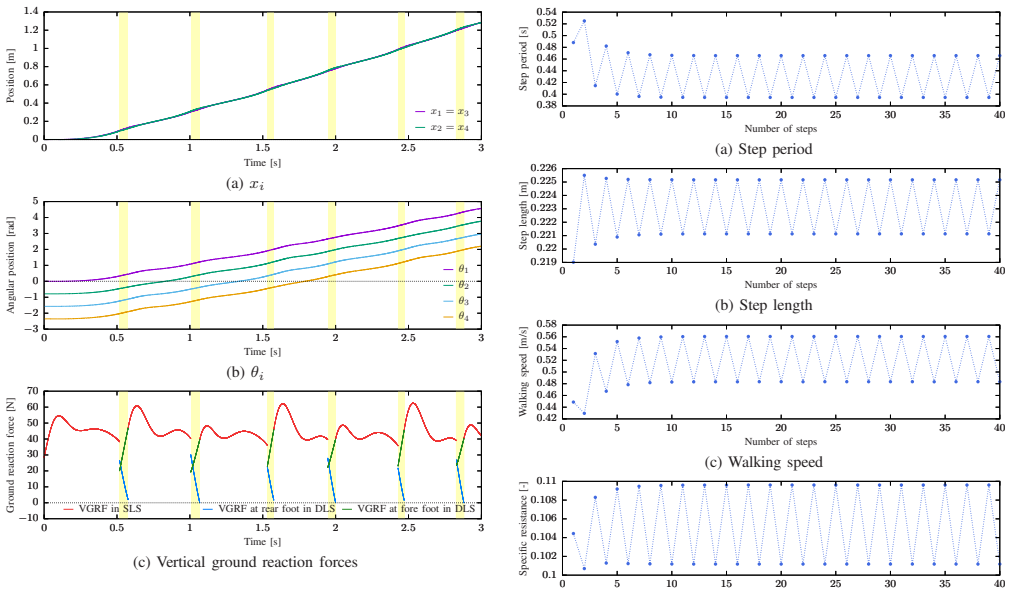
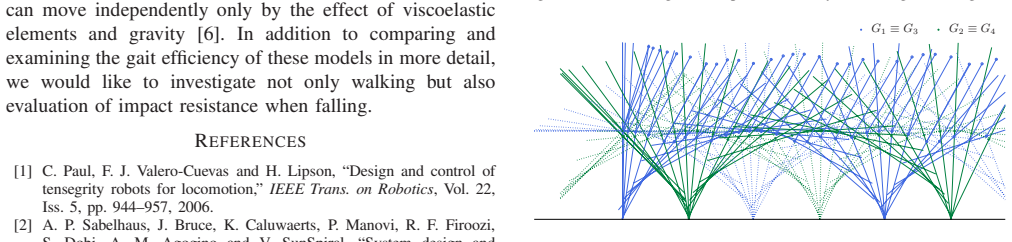
11 0 5 10 15 20 25 30 35 40 (d) Specific resistance Fig. 7. Evolution of gait descriptors in limit cycle walking on level ground G1 ≡ G3 G2 ≡ G4 Fig. 8. Stick diagram for generated level gait in Fig. 2
-
[18]
F. Asano and I. Tokuda, “Indirectly controlled limit cy cle walking of combined rimless wheel based on entrainment to active wob bling motion,” Multibody System Dynamics , V ol. 34, Iss. 2, pp. 191–210, 2015
work page 2015
-
[19]
D. J. Gonzalez and H. H. Asada, “Passive quadrupedal gai t synchro- nization for extra robotic legs using a dynamically coupled double rimless wheel model,” Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 3451–3457, 2020
work page 2020
-
[20]
F. Asano, “Simulation and experimental studies on pass ive-dynamic walker that consists of two identical crossed frames,” Proc. of the IEEE Int. Conf. on Robotics and Automation , pp. 1703–1708, 2010
work page 2010
-
[21]
Lower limb rehabilitation e xoskeleton robot: A review,
J. Zhou, S. Y ang and Q. Xue, “Lower limb rehabilitation e xoskeleton robot: A review,” Advanced in Mechanical Engineering , V ol. 13, Iss. 4, pp. 1–17, 2021
work page 2021
-
[22]
Development and testing o f a passive walking assist exoskeleton,
Z. Lovrenovic and M. Doumit, “Development and testing o f a passive walking assist exoskeleton,” Biocybernetics and Biomedical Engineer- ing, V ol. 39, Iss. 4, pp. 992–1004, 2019
work page 2019
-
[23]
D. Matsuura, R. Funato, M. Ogata, M. Higuchi and Y . Taked a, “Ef- ficiency improvement of walking assist machine using crutch es based on gait-feasible region analysis, Mechanism and Machine Theory , V ol. 84, pp. 126–133, 2015
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.