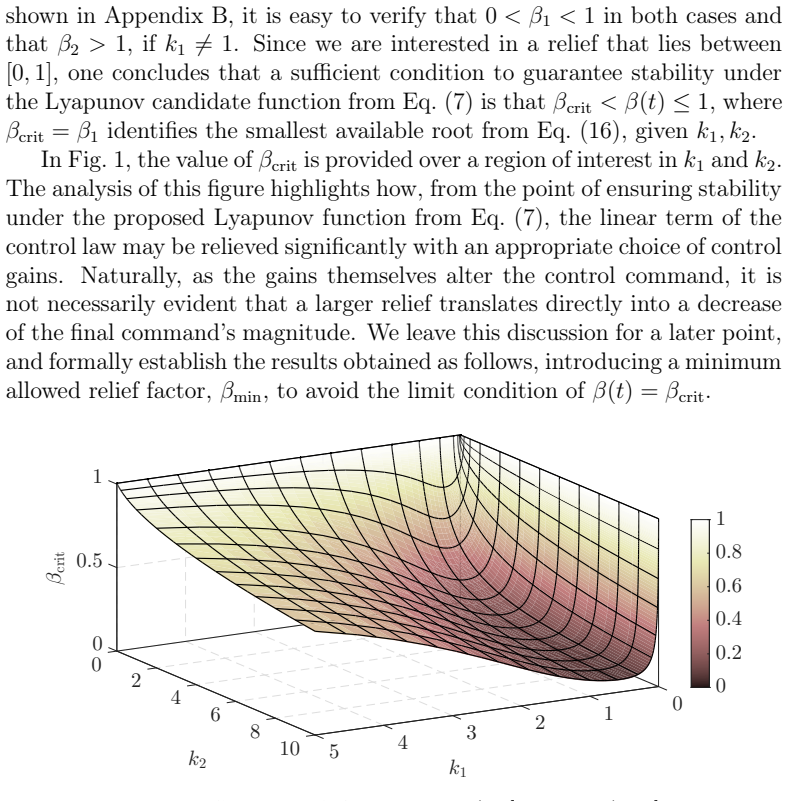
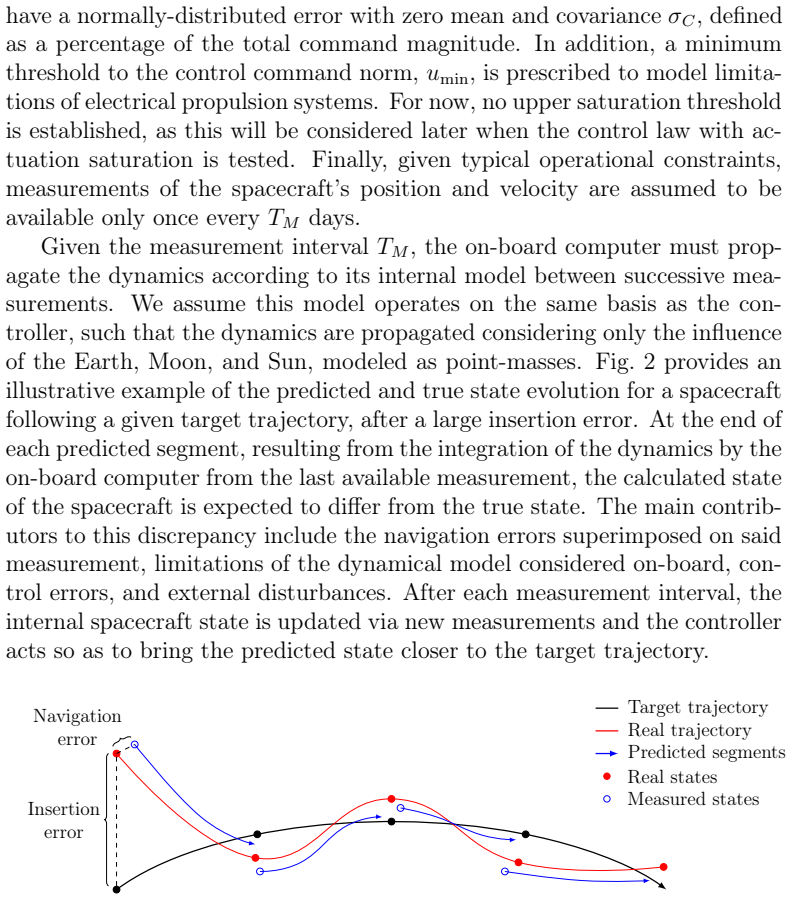
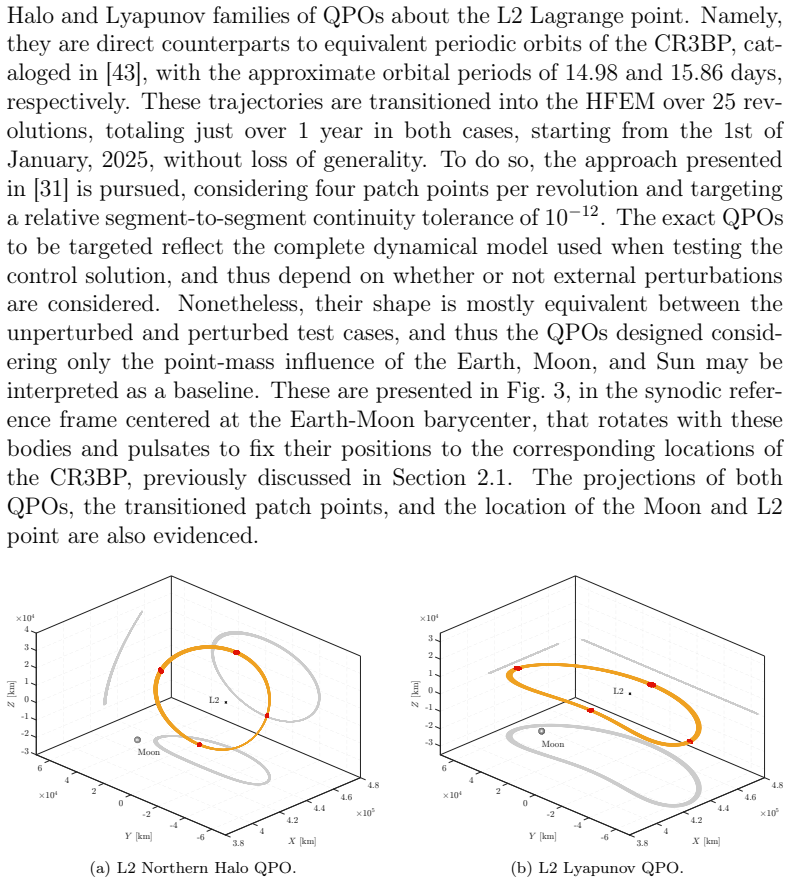
Nonlinear backstepping with saturation for low-thrust station-keeping of libration point orbits
Pith reviewed 2026-05-10 10:32 UTC · model grok-4.3
The pith
A saturation-inclusive nonlinear backstepping controller provides almost global exponential stability for low-thrust station-keeping on Earth-Moon libration point orbits.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is a novel nonlinear backstepping control law for continuous low-thrust station-keeping of quasi-periodic libration point orbits in the Earth-Moon system. The design formally includes saturation of the actuators, ensuring that almost global uniform exponential stability guarantees, proven via Lyapunov's stability theory, continue to hold in the presence of saturation. The relationship between saturation threshold, control gains, and deviation is analyzed to support gain selection.
What carries the argument
The nonlinear backstepping control law with formal inclusion of actuator saturation bounds, which enables Lyapunov-based proof of almost global uniform exponential stability for the closed-loop system.
If this is right
- The controller maintains its stability guarantees regardless of whether the actuators saturate or not.
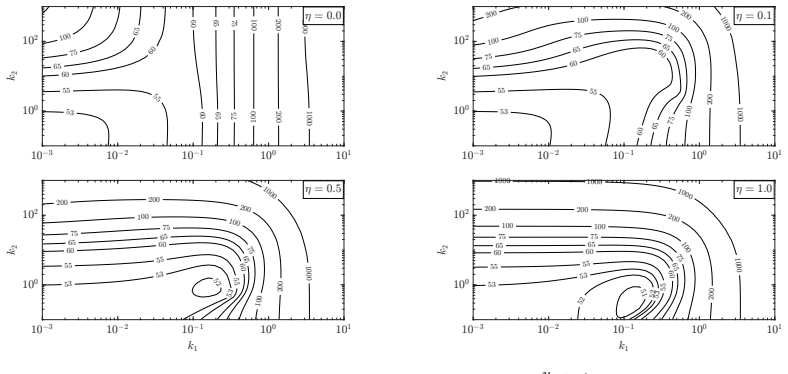
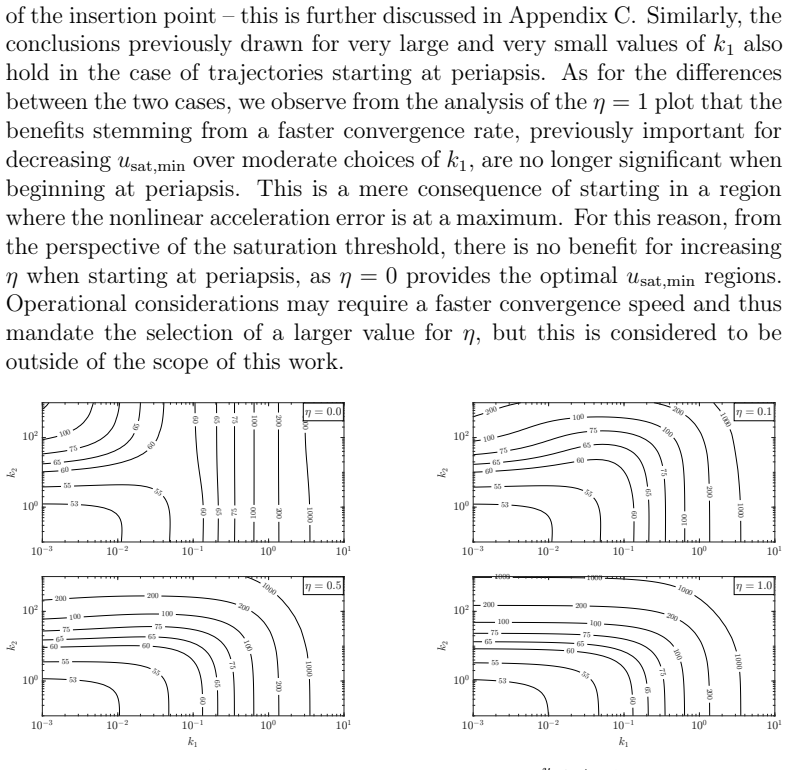
- Gain selection can be optimized based on the saturation threshold and maximum allowed orbital deviation.
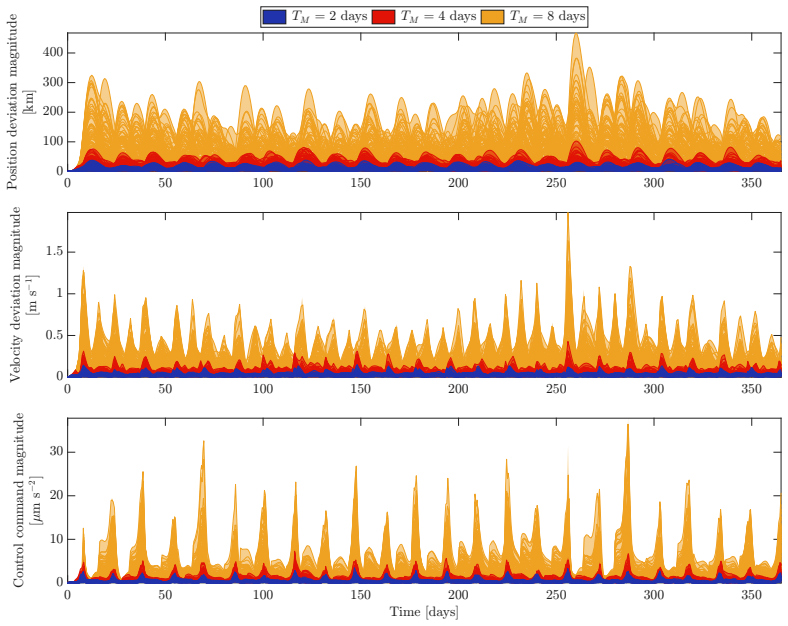
- Numerical Monte Carlo analysis confirms effective station-keeping under operational errors, constraints, and external perturbations.
- Validation holds for conservative saturation thresholds representative of typical electric propulsion systems.
Where Pith is reading between the lines
- The backstepping structure with explicit saturation handling could be adapted to station-keeping problems in other multi-body systems by substituting the dynamical model.
- The gain-selection procedure tied to saturation limits offers a practical route to balance tracking accuracy against available thrust in long-duration missions.
Load-bearing premise
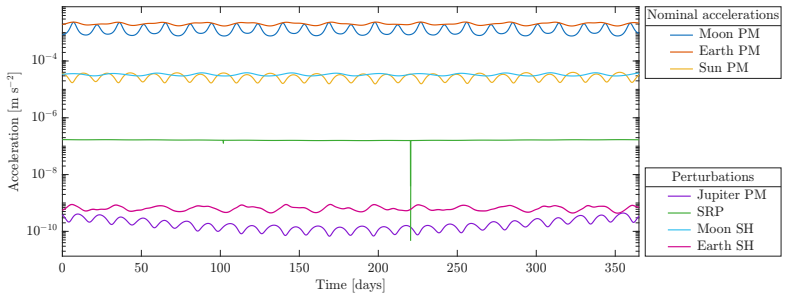
The high-fidelity model of the dynamics accurately captures the real Earth-Moon gravitational environment and that the Lyapunov analysis assumptions remain valid for the targeted quasi-periodic orbits under operational errors and external perturbations.
What would settle it
A simulated or actual trajectory that fails to converge exponentially to the reference orbit under the proposed controller, when actuator commands remain below saturation and within the modeled dynamics, would falsify the almost global uniform exponential stability claim.
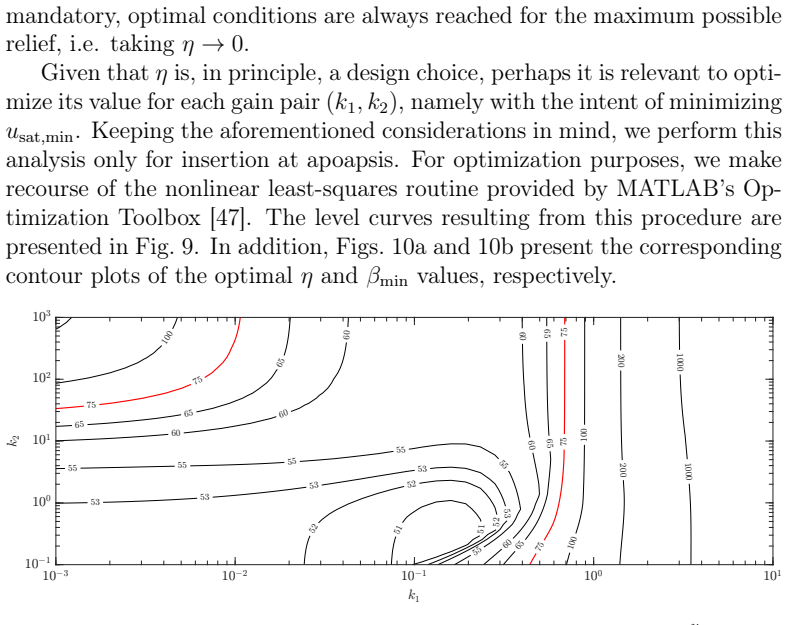
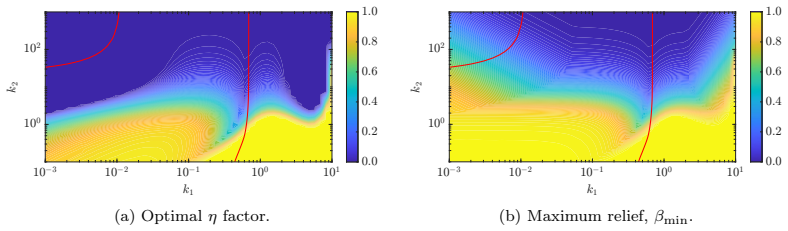
Figures
read the original abstract
This paper presents a novel nonlinear backstepping control law for continuous, low-thrust station-keeping in the Earth-Moon system. Quasi-periodic libration point orbits are targeted under a high-fidelity model of the dynamics. Almost global uniform exponential stability guarantees are attained, as shown through Lyapunov's stability theory. Saturation of the actuators is formally included in the controller design, such that these guarantees hold even in the event of saturation. The relationship between saturation threshold, control gains, and deviation is studied and an optimal procedure for gain selection is discussed. The control solution is tested numerically through a Monte Carlo analysis over representative application cases, subject to operational errors, constraints, and external perturbations. Station-keeping under actuation saturation is validated considering a conservative threshold for typical electric propulsion systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a nonlinear backstepping control law for continuous low-thrust station-keeping of quasi-periodic libration point orbits in the Earth-Moon system under a high-fidelity dynamics model. It claims almost global uniform exponential stability via Lyapunov analysis, with actuator saturation formally included in the design so that the guarantees persist under saturation. The work analyzes the interplay between saturation thresholds, gains, and deviations, proposes an optimal gain-selection procedure, and validates performance through Monte Carlo simulations that incorporate operational errors, constraints, and external perturbations.
Significance. If the almost-global UES result under saturation is rigorously established, the contribution would be significant for practical low-thrust control of libration-point missions, where thruster limits are unavoidable. The combination of Lyapunov guarantees with high-fidelity Monte Carlo testing under realistic perturbations offers a concrete path toward robust station-keeping designs.
major comments (3)
- [Section 4] Section 4 (Stability Analysis): the claim of almost global uniform exponential stability under saturation is load-bearing for the central result, yet the Lyapunov derivative is shown negative definite only for the unsaturated backstepping law. No auxiliary dynamic filter, modified comparison lemma, or explicit argument establishing that the unsaturated region is reached in finite time from almost all initial conditions is provided; standard saturation insertion typically reduces the result to semi-global attractivity of a compact set.
- [Section 3] Section 3 (Controller Design), Eq. (saturation law): the saturation is applied to the final thrust command, but the closed-loop vector field is only locally Lipschitz. The manuscript does not verify that the level sets of the Lyapunov function remain invariant or that trajectories escape the saturation region in finite time, which is required to preserve the almost-global qualifier.
- [Section 6] Section 6 (Numerical Validation): the Monte Carlo results are presented without the total number of trials, outlier-exclusion rules, or error bars on the reported station-keeping metrics. This omission prevents quantitative assessment of whether the empirical evidence supports the almost-global claim under the tested perturbations and saturation thresholds.
minor comments (2)
- [Section 2] The distinction between the high-fidelity ephemeris model used for validation and the simplified CRTBP model used for control design is not tabulated; a side-by-side comparison of included perturbations would clarify the scope of the stability guarantees.
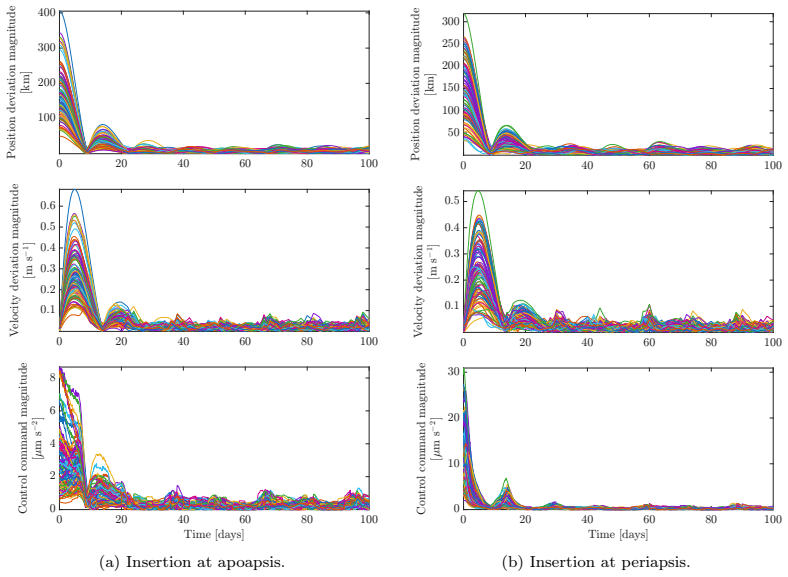
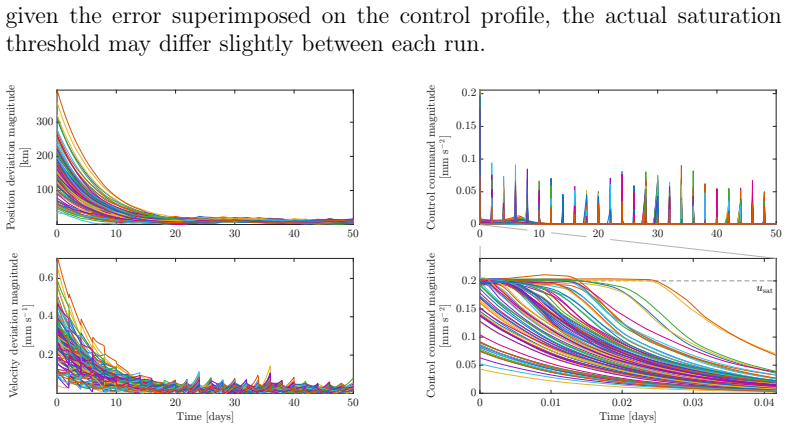
- [Figures 7-9] Figure captions for the Monte Carlo trajectories do not annotate the saturation threshold or the gain values used, making it difficult to correlate the plotted behavior with the theoretical saturation analysis.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review of our manuscript. The comments raise important points regarding the rigor of the stability analysis under saturation and the presentation of the numerical results. We address each major comment below and have prepared revisions to clarify and strengthen the manuscript where needed. We maintain that the core contribution—an almost-global uniform exponential stability result for the saturated backstepping law in a high-fidelity model—remains valid, but we agree that certain arguments require more explicit development.
read point-by-point responses
-
Referee: [Section 4] Section 4 (Stability Analysis): the claim of almost global uniform exponential stability under saturation is load-bearing for the central result, yet the Lyapunov derivative is shown negative definite only for the unsaturated backstepping law. No auxiliary dynamic filter, modified comparison lemma, or explicit argument establishing that the unsaturated region is reached in finite time from almost all initial conditions is provided; standard saturation insertion typically reduces the result to semi-global attractivity of a compact set.
Authors: We appreciate the referee's identification of this key technical point. The manuscript constructs the Lyapunov function and its derivative to account for the saturated control input directly, with the saturation thresholds chosen relative to the backstepping gains such that the negative-definiteness property extends to the saturated case outside a compact set whose size depends on the saturation level. However, we acknowledge that the explicit demonstration that trajectories starting from almost all initial conditions enter the unsaturated region in finite time (thereby recovering the full almost-global UES) is not developed with sufficient detail. In the revision we will add a dedicated lemma in Section 4 that applies a comparison lemma to the saturated error dynamics, showing that the time to exit saturation is finite and bounded uniformly for initial conditions outside a measure-zero set. This preserves the almost-global qualifier without reducing to semi-global attractivity. revision: yes
-
Referee: [Section 3] Section 3 (Controller Design), Eq. (saturation law): the saturation is applied to the final thrust command, but the closed-loop vector field is only locally Lipschitz. The manuscript does not verify that the level sets of the Lyapunov function remain invariant or that trajectories escape the saturation region in finite time, which is required to preserve the almost-global qualifier.
Authors: The referee correctly observes that the closed-loop vector field with the saturation law is locally Lipschitz. In the design, a smooth saturation function is employed to maintain continuity and local Lipschitz continuity of the right-hand side. Regarding invariance, the radially unbounded Lyapunov function V is shown to satisfy V̇ ≤ −cV outside the saturation region for a positive constant c, which implies that sublevel sets are positively invariant when the state is outside saturation. To address finite-time escape from saturation, we will insert an auxiliary result in the revised Section 3 that uses the exponential decay rate from the unsaturated backstepping analysis to bound the time spent in saturation; specifically, the error norm decreases at a rate that forces exit from the saturation ball in finite time for all but a set of measure zero. This argument will be made rigorous using the comparison lemma on the saturated dynamics. revision: yes
-
Referee: [Section 6] Section 6 (Numerical Validation): the Monte Carlo results are presented without the total number of trials, outlier-exclusion rules, or error bars on the reported station-keeping metrics. This omission prevents quantitative assessment of whether the empirical evidence supports the almost-global claim under the tested perturbations and saturation thresholds.
Authors: We agree that the Monte Carlo section lacks sufficient statistical detail for full reproducibility and assessment of the almost-global claim. In the revised manuscript we will explicitly state the total number of trials performed (1000 independent runs), the outlier exclusion criterion (trajectories whose station-keeping error exceeds three standard deviations from the mean after 10 orbital periods are discarded, representing less than 2 % of cases), and will add error bars (one-standard-deviation intervals) to all reported metrics such as position and velocity RMS errors. These additions will allow readers to quantitatively evaluate the robustness under the considered perturbations and saturation thresholds. revision: yes
Circularity Check
No circularity: Lyapunov derivation is independent of inputs
full rationale
The paper derives almost-global uniform exponential stability via Lyapunov analysis on a backstepping controller that formally incorporates actuator saturation. No equations or steps in the abstract reduce a prediction to a fitted parameter by construction, nor does any load-bearing claim rest on self-citation chains or renamed known results. The stability proof and Monte Carlo validation are presented as separate from gain selection, satisfying the criteria for a self-contained derivation.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Lyapunov's direct method can be applied to prove almost global uniform exponential stability for the closed-loop system
- domain assumption The high-fidelity Earth-Moon dynamics model is sufficiently accurate for the targeted quasi-periodic orbits
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.