Recognition: unknown
Iterated Invariant EKF for Quadruped Robot Odometry
Pith reviewed 2026-05-10 10:32 UTC · model grok-4.3
The pith
An iterated invariant extended Kalman filter using proprioceptive foot-velocity constraints improves accuracy and consistency for quadruped odometry over standard IEKF and SO(3) filters.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
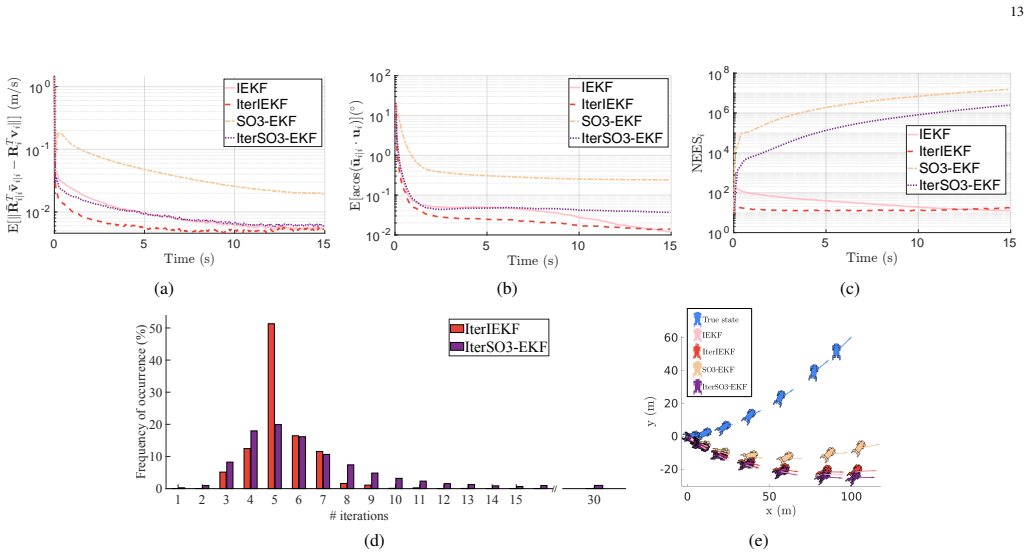
The IterIEKF preserves the compatibility properties of the classical Kalman filter for both prediction and update steps on the Lie group of rigid-body motions. When the update is built from stationary-foot-velocity and base-velocity measurements, the resulting filter produces more accurate and consistent pose and velocity estimates than prior invariant or SO(3) formulations on both simulated and hardware quadruped trajectories.
What carries the argument
The Iterated Invariant Extended Kalman Filter (IterIEKF), whose iterated update step exploits group-affine dynamics and invariant measurement models derived from kinematic foot-contact constraints.
If this is right
- State estimates remain consistent even when the robot walks on uneven terrain that would corrupt exteroceptive sensors.
- The filter can be implemented on-board with only joint encoders and IMU data, reducing hardware cost and latency.
- Because the update respects the underlying Lie-group structure, covariance propagation stays compatible with the geometry of SE(3).
- The same proprioceptive update equations apply to any legged platform whose kinematics admit stationary-foot constraints.
Where Pith is reading between the lines
- If slip detection is added as a measurement gating step, the same IterIEKF structure could automatically fall back to prediction-only mode during detected slips.
- The invariance properties may extend to other contact-rich tasks such as manipulation or climbing if analogous zero-velocity constraints can be formulated.
- Because the method is fully open-source, direct comparison on additional public quadruped datasets would quickly reveal whether the accuracy gain generalizes across different gait patterns and robot morphologies.
Load-bearing premise
Contacts remain perfectly stationary with no slip and the velocity measurements are accurate enough for the invariance properties to hold.
What would settle it
Run the same quadruped trajectory with deliberate foot slip; if the IterIEKF no longer outperforms the vanilla IEKF in RMSE or normalized estimation error squared, the invariance-based advantage is lost.
Figures
















read the original abstract
Kalman filter-based algorithms are fundamental for mobile robots, as they provide a computationally efficient solution to the challenging problem of state estimation. However, they rely on two main assumptions that are difficult to satisfy in practice: (a) the system dynamics must be linear with Gaussian process noise, and (b) the measurement model must also be linear with Gaussian measurement noise. Previous works have extended assumption (a) to nonlinear spaces through the Invariant Extended Kalman Filter (IEKF), showing that it retains properties similar to those of the classical Kalman filter when the system dynamics are group-affine on a Lie group. More recently, the counterpart of assumption (b) for the same nonlinear setting was addressed in [1]. By means of the proposed Iterated Invariant Extended Kalman Filter (IterIEKF), the authors of that work demonstrated that the update step exhibits several compatibility properties of the classical linear Kalman filter. In this work, we introduce a novel open-source state estimation algorithm for legged robots based on the IterIEKF. The update step of the proposed filter relies solely on proprioceptive measurements, exploiting kinematic constraints on foot velocity during contact and base-frame velocity, making it inherently robust to environmental conditions. Through extensive numerical simulations and evaluation on real-world datasets, we demonstrate that the IterIEKF outperforms the vanilla IEKF, the SO(3)-based Kalman Filter, and its iterated variant in terms of both accuracy and consistency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces an open-source Iterated Invariant Extended Kalman Filter (IterIEKF) for quadruped robot odometry. It applies the IterIEKF framework from prior work to a proprioceptive measurement model that enforces kinematic constraints on stance-foot velocity (treated as zero) and base-frame velocity. The central claim is that this yields better accuracy and consistency than vanilla IEKF, SO(3)-based KF, and its iterated variant, as shown in numerical simulations and real-world datasets. The approach is positioned as inherently robust because it avoids exteroceptive sensors.
Significance. If the reported gains hold under the stated assumptions, the work supplies a practical, open-source proprioceptive odometry pipeline for legged robots that can operate without reliance on vision or LiDAR. This is a useful incremental extension of invariant filtering to the quadruped setting and the reproducible code is a clear strength.
major comments (2)
- [Section 4] Measurement model (Section 4 / Eq. for foot-velocity constraint): the update explicitly sets stance-foot velocity to zero and treats base velocity as directly measurable. This enforces the group-affine structure required for IterIEKF compatibility, yet the manuscript contains no ablation or sensitivity analysis quantifying how NEES and RMSE degrade once realistic slip occurs. Because the abstract claims “inherent robustness to environmental conditions,” the absence of slip tests is load-bearing for the extrapolation beyond the chosen datasets.
- [Section 5] Experimental evaluation (Section 5): the outperformance claims rest on simulations and real datasets, but the text does not report the precise statistical tests, number of Monte-Carlo runs, or whether noise covariances were tuned after seeing the test data. Without these details the consistency advantage cannot be verified as statistically reliable rather than an artifact of the no-slip regime.
minor comments (2)
- [Section 3] Notation for the iterated update (Eq. 12–15) re-uses symbols from the original IterIEKF paper without re-defining them locally; a short self-contained recap would improve readability.
- [Figure 4] Figure captions for the real-robot trajectories do not state the terrain type or friction conditions, making it difficult to judge how close the evaluation stays to the zero-slip assumption.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below with clarifications and planned revisions.
read point-by-point responses
-
Referee: [Section 4] Measurement model (Section 4 / Eq. for foot-velocity constraint): the update explicitly sets stance-foot velocity to zero and treats base velocity as directly measurable. This enforces the group-affine structure required for IterIEKF compatibility, yet the manuscript contains no ablation or sensitivity analysis quantifying how NEES and RMSE degrade once realistic slip occurs. Because the abstract claims “inherent robustness to environmental conditions,” the absence of slip tests is load-bearing for the extrapolation beyond the chosen datasets.
Authors: The measurement model does rely on the standard no-slip assumption for stance-foot velocity, which is required to maintain the group-affine structure for the IterIEKF. The phrase 'inherent robustness to environmental conditions' in the abstract refers specifically to the filter's independence from exteroceptive sensors (vision or LiDAR), which are sensitive to lighting, weather, and terrain appearance. We agree that an explicit sensitivity analysis to slip is absent. In the revised manuscript we will add a paragraph in Section 4 clarifying the no-slip modeling assumption and include a limited sensitivity study that injects controlled slip velocities into the simulation to report the resulting changes in NEES and RMSE. revision: partial
-
Referee: [Section 5] Experimental evaluation (Section 5): the outperformance claims rest on simulations and real datasets, but the text does not report the precise statistical tests, number of Monte-Carlo runs, or whether noise covariances were tuned after seeing the test data. Without these details the consistency advantage cannot be verified as statistically reliable rather than an artifact of the no-slip regime.
Authors: We will expand Section 5 to report that all simulation results are averaged over 50 independent Monte-Carlo runs, that statistical significance was assessed with paired Wilcoxon signed-rank tests between methods, and that process and measurement noise covariances were tuned exclusively on a held-out validation portion of the data (never on the final test sets). These additions will make the consistency claims verifiable and address the concern about potential data leakage. revision: yes
Circularity Check
No significant circularity; empirical performance claims rest on independent dataset evaluations rather than self-referential derivations.
full rationale
The paper applies the IterIEKF framework from reference [1] to quadruped state estimation by defining a measurement model based on proprioceptive kinematic constraints (foot velocity zero during contact, base velocity). The central claims of superior accuracy and consistency are supported by numerical simulations and real-world dataset evaluations, which are external to the framework itself. No equations or steps reduce a 'prediction' or 'result' to a fitted parameter or prior self-citation by construction. The citation to [1] supplies the theoretical compatibility properties but does not bear the load of the comparative performance results, which remain falsifiable on held-out data.
Axiom & Free-Parameter Ledger
free parameters (1)
- Process and measurement noise covariances
axioms (2)
- domain assumption System dynamics are group-affine on a Lie group
- domain assumption Measurement model satisfies conditions allowing iterated update to exhibit compatibility properties
Reference graph
Works this paper leans on
-
[1]
Iterated Invariant Extended Kalman Filter (IterIEKF),
S. Goffin, A. Barrau, S. Bonnabel, O. Br ¨uls, and P. Sacr ´e, “Iterated Invariant Extended Kalman Filter (IterIEKF),”IEEE Trans. Autom. Control, pp. 1–8, 2025
2025
-
[2]
Introduction to random signals and applied kalman filtering: with matlab exercises and solutions,
R. G. Brown and P. Y . Hwang, “Introduction to random signals and applied kalman filtering: with matlab exercises and solutions,”Intro- duction to random signals and applied Kalman filtering: with MATLAB exercises and solutions, 1997
1997
-
[3]
State estimation for legged robots - consistent fusion of leg kinematics and IMU,
M. Bloesch, M. Hutter, M. Hoepflinger, S. Leutenegger, C. Gehring, C. Remy, and R. Siegwart, “State estimation for legged robots - consistent fusion of leg kinematics and IMU,” inRSS, 07 2012
2012
-
[4]
Contact- aided invariant extended Kalman filtering for robot state estimation,
R. Hartley, M. G. Jadidi, R. M. Eustice, and J. W. Grizzle, “Contact- aided invariant extended Kalman filtering for robot state estimation,”Int. J. Robot. Res, vol. 39, pp. 402 – 430, 2019
2019
-
[5]
State estimation for legged robots on unstable and slippery terrain,
M. Bloesch, C. Gehring, P. Fankhauser, M. Hutter, M. A. Hoepflinger, and R. Siegwart, “State estimation for legged robots on unstable and slippery terrain,” in2013 IEEE/RSJ Int. Conf. Intell. Robots Syst., 2013, pp. 6058–6064
2013
-
[6]
Pronto: A multi- sensor state estimator for legged robots in real-world scenarios,
M. Camurri, M. Ramezani, S. Nobili, and M. Fallon, “Pronto: A multi- sensor state estimator for legged robots in real-world scenarios,”Front. Robot. AI, vol. 7, p. 68, 2020
2020
-
[7]
MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots,
Y . Nistic `o, J. C. V . Soares, L. Amatucci, G. Fink, and C. Semini, “MUSE: A Real-Time Multi-Sensor State Estimator for Quadruped Robots,”IEEE Robot. Autom. Lett, vol. 10, no. 5, pp. 4620–4627, Jan. 2025
2025
-
[8]
Proprioceptive invariant robot state estimation,
T.-Y . Lin, T. Li, W. Tong, and M. Ghaffari, “Proprioceptive invariant robot state estimation,”arXiv preprint arXiv:2311.04320, 2023
-
[9]
The invariant extended kalman filter as a stable observer,
A. Barrau and S. Bonnabel, “The invariant extended kalman filter as a stable observer,”IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 1797– 1812, 2016
2016
-
[10]
Jazwinski,Stochastic processes and filtering theory, ser
A. Jazwinski,Stochastic processes and filtering theory, ser. Math. Sci. Eng. New York, NY [u.a.]: Acad. Press, 1970, no. 64
1970
-
[11]
The iterated kalman smoother as a gauss–newton method,
B. M. Bell, “The iterated kalman smoother as a gauss–newton method,” SIAM J. Optim., vol. 4, no. 3, pp. 626–636, 1994
1994
-
[12]
From in- trinsic optimization to iterated extended kalman filtering on lie groups,
G. Bourmaud, R. M ´egret, A. Giremus, and Y . Berthoumieu, “From in- trinsic optimization to iterated extended kalman filtering on lie groups,” J. Math. Imaging Vis., vol. 55, no. 3, pp. 284–303, 2016
2016
-
[13]
Kalman filters on differentiable manifolds,
D. He, W. Xu, and F. Zhang, “Kalman filters on differentiable mani- folds,”arXiv preprint arXiv:2102.03804, 2021
-
[14]
An ekf-slam algorithm with consistency properties,
A. Barrau and S. Bonnabel, “An ekf-slam algorithm with consistency properties,”arXiv preprint arXiv:1510.06263, 2015
-
[15]
Invariant kalman filtering,
——, “Invariant kalman filtering,”Annu. Rev. Control. Robot. Auton. Syst., vol. 1, no. 1, pp. 237–257, 2018
2018
-
[16]
Non-linear state error based extended kalman filters with applications to navigation,
A. Barrau, “Non-linear state error based extended kalman filters with applications to navigation,” Ph.D. dissertation, Mines Paristech, 2015
2015
-
[17]
A micro lie theory f or state es timation in robotics,
J. Sol `a, J. Deray, and D. Atchuthan, “A micro lie theory for state estimation in robotics,”ArXiv, vol. abs/1812.01537, 2018
-
[18]
Lie groups, lie algebras, and representations,
B. C. Hall, “Lie groups, lie algebras, and representations,” inQuantum Theory Math.Springer, 2013, pp. 333–366
2013
-
[19]
Associating uncertainty to extended poses for on lie group IMU preintegration with rotating earth,
M. Brossard, A. Barrau, P. Chauchat, and S. Bonnabel, “Associating uncertainty to extended poses for on lie group IMU preintegration with rotating earth,”IEEE Trans. Robot., vol. 38, no. 2, pp. 998–1015, 2021
2021
-
[20]
VILENS: Visual, inertial, lidar, and leg odometry for all-terrain legged robots,
D. Wisth, M. Camurri, and M. Fallon, “VILENS: Visual, inertial, lidar, and leg odometry for all-terrain legged robots,”IEEE Trans. Robot., vol. 39, no. 1, p. 309–326, Feb. 2023
2023
-
[21]
On state estimation for legged locomotion over soft terrain,
S. Fahmi, G. Fink, and C. Semini, “On state estimation for legged locomotion over soft terrain,”IEEE Sens. Lett., vol. 5, no. 1, p. 1–4, Jan. 2021
2021
-
[22]
Legged robot state estimation using invariant kalman filtering and learned contact events,
T.-Y . Lin, R. Zhang, J. Yu, and M. Ghaffari, “Legged robot state estimation using invariant kalman filtering and learned contact events,” arXiv preprint arXiv:2106.15713, 2021
-
[23]
Legged robot state estimation with invariant extended kalman filter using neural measurement network,
D. Youm, H. Oh, S. Choi, H. Kim, S. Jeon, and J. Hwangbo, “Legged robot state estimation with invariant extended kalman filter using neural measurement network,” in2025 IEEE Int. Conf. Robot. Autom., 2025, pp. 670–676
2025
-
[24]
Proprioceptive state estimation for quadruped robots using invariant kalman filtering and scale-variant robust cost functions,
H. M. S. Santana, J. C. V . Soares, Y . Nistic `o, M. A. Meggiolaro, and C. Semini, “Proprioceptive state estimation for quadruped robots using invariant kalman filtering and scale-variant robust cost functions,” in 2024 IEEE-RAS Int. Conf. Humanoid Robots. IEEE, 2024, pp. 213– 220
2024
-
[25]
Legged robot state estimation using invariant neural-augmented kalman filter with a neural compensator,
S. Lee, H.-B. Kim, and K.-S. Kim, “Legged robot state estimation using invariant neural-augmented kalman filter with a neural compensator,” in 2025 IEEE/RSJ Int. Conf. Intell. Robots Syst., 2025, pp. 15 445–15 452
2025
-
[26]
Invariant smoother for legged robot state estimation with dynamic contact event information,
Z. Yoon, J.-H. Kim, and H.-W. Park, “Invariant smoother for legged robot state estimation with dynamic contact event information,”IEEE Trans. Robot., vol. 40, pp. 193–212, 2024
2024
-
[27]
Proprioceptive sensor fusion for quadruped robot state estimation,
G. Fink and C. Semini, “Proprioceptive sensor fusion for quadruped robot state estimation,” in2020 IEEE/RSJ Int. Conf. Intell. Robots Syst., 2020, pp. 10 914–10 920
2020
-
[28]
The geometry of navigation problems,
A. Barrau and S. Bonnabel, “The geometry of navigation problems,” IEEE Trans. Autom. Control, vol. 68, no. 2, pp. 689–704, 2022
2022
-
[29]
Deep learning, inertial measurements units, and odometry: some modern prototyping techniques for navigation based on multi- sensor fusion,
M. Brossard, “Deep learning, inertial measurements units, and odometry: some modern prototyping techniques for navigation based on multi- sensor fusion,” Ph.D. dissertation, Universit ´e Paris sciences et lettres, 2020
2020
-
[30]
Stillwell,Naive Lie Theory, ser
J. Stillwell,Naive Lie Theory, ser. Undergraduate Texts in Mathematics. Springer New York, 2008
2008
-
[31]
Bar-Shalom, T
Y . Bar-Shalom, T. Kirubarajan, and X.-R. Li,Estimation with Applica- tions to Tracking and Navigation. USA: John Wiley & Sons, Inc., 2002
2002
-
[32]
Error propagation on the euclidean group with applications to manipulator kinematics,
Y . Wang and G. S. Chirikjian, “Error propagation on the euclidean group with applications to manipulator kinematics,”IEEE Trans. Robot., vol. 22, no. 4, pp. 591–602, 2006
2006
-
[33]
Pedestrian tracking with shoe-mounted inertial sensors,
E. Foxlin, “Pedestrian tracking with shoe-mounted inertial sensors,” IEEE Comput. Graph. Appl., vol. 25, no. 6, pp. 38–46, 2005
2005
-
[34]
I2EKF-LO: A dual-iteration extended Kalman filter based LiDAR odometry,
W. Yu, J. Xu, C. Zhao, L. Zhao, T.-M. Nguyen, S. Yuan, M. Bai, and L. Xie, “I2EKF-LO: A dual-iteration extended Kalman filter based LiDAR odometry,” in2024 IEEE/RSJ Int. Conf. Intell. Robots Syst. IEEE, 2024, pp. 10 453–10 460
2024
-
[35]
MuJoCo: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “MuJoCo: A physics engine for model-based control,” in2012 IEEE/RSJ Int. Conf. Intell. Robots Syst., 2012, pp. 5026–5033
2012
-
[36]
On the benefits of GPU sample-based stochastic predictive controllers for legged locomotion,
G. Turrisi, V . Modugno, L. Amatucci, D. Kanoulas, and C. Semini, “On the benefits of GPU sample-based stochastic predictive controllers for legged locomotion,” in2024 IEEE/RSJ Int. Conf. Intell. Robots Syst., 2024, pp. 13 757–13 764
2024
-
[37]
Extended kalman filtering with nonlin- ear equality constraints: A geometric approach,
A. Barrau and S. Bonnabel, “Extended kalman filtering with nonlin- ear equality constraints: A geometric approach,”IEEE Trans. Autom. Control, vol. 65, no. 6, pp. 2325–2338, 2019
2019
-
[38]
Farrell,Aided Navigation: GPS with High Rate Sensors, ser
J. Farrell,Aided Navigation: GPS with High Rate Sensors, ser. McGraw- Hill professional engineering: Electronic engineering. McGraw Hill LLC, 2008
2008
-
[39]
Quaternion kinematics for the error-state kalman filter,
J. Sola, “Quaternion kinematics for the error-state kalman filter,” 2017
2017
-
[40]
On-manifold preintegration for real-time visual–inertial odometry,
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On-manifold preintegration for real-time visual–inertial odometry,”IEEE Trans. Robot., vol. 33, no. 1, p. 1–21, Feb. 2017
2017
-
[41]
Corke, W
P. Corke, W. Jachimczyk, and R. Pillat,Robotics, Vision and Control: Fundamental Algorithms in MATLAB, 3rd ed. Springer International Publishing, 2023
2023
-
[42]
State estimation of linear systems with state equality constraints,
S. Ko and R. R. Bitmead, “State estimation of linear systems with state equality constraints,”IFAC Proceedings Volumes, vol. 38, no. 1, pp. 241–246, 2005
2005
-
[43]
Anymal-a highly mobile quadrupedal robot,
M. Hutter, C. Gehring, D. Jud, A. Lauber, C. C. Bellicoso, V . Tsounis, J. Hwangbo, K. Bodie, P. Fankhauser, M. Bloesch,et al., “Anymal-a highly mobile quadrupedal robot,” in2016 IEEE/RSJ Int. Conf. Intell. Robots Syst.IEEE, 2016, pp. 3136–3143
2016
-
[44]
Grandtour: A legged robotics dataset in the wild for multi-modal perception and state estimation,
J. Frey, T. Tuna, F. Fu, K. Patterson, T. Xu, M. Fallon, C. Ca- dena, and M. Hutter, “Grandtour: A legged robotics dataset in the wild for multi-modal perception and state estimation,”arXiv preprint arXiv:2602.18164, 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.