Planner Matters! An Efficient and Unbalanced Multi-agent Collaboration Framework for Long-horizon Planning
Pith reviewed 2026-05-09 16:46 UTC · model grok-4.3
The pith
Allocating most compute and learning to a dedicated planner improves long-horizon agent tasks while freezing execution and memory components.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that planning is the dominant factor in long-horizon performance. A systematic compute-allocation study shows execution and memory management need far less model capacity. The planner-centric reinforcement learning method therefore optimizes only the planner using VLM-as-judge trajectory rewards while freezing the remaining components, producing robust gains on web navigation, OS control, and tool-use benchmarks with clear efficiency advantages.
What carries the argument
The planner-centric reinforcement learning approach, which trains solely the high-level decision component with external trajectory rewards while the actor and memory manager stay fixed.
If this is right
- Success rates rise on web navigation, OS control, and tool-use benchmarks without enlarging the execution or memory models.
- Overall compute drops because only the planner receives significant training and capacity.
- Competitive results remain possible even when actor and memory components are never updated during learning.
- The planning-dominant pattern appears across the three tested domains.
Where Pith is reading between the lines
- Future agent designs could assign larger models and more training exclusively to planning modules while using lightweight frozen executors.
- The unbalanced allocation may reduce the need for full end-to-end fine-tuning in multi-step agent systems.
- Replacing the VLM judge with other reward sources would test how much the gains depend on that particular evaluator.
Load-bearing premise
The vision-language model judge supplies unbiased, reliable rewards for full trajectories, and the dominance of planning holds beyond the specific benchmarks and model sizes tested.
What would settle it
Replace the VLM judge with human ratings or a different automated scorer on the same benchmarks and check whether the performance edge over balanced training disappears; or run the method on an untested long-horizon domain such as multi-step physical assembly.
Figures





read the original abstract
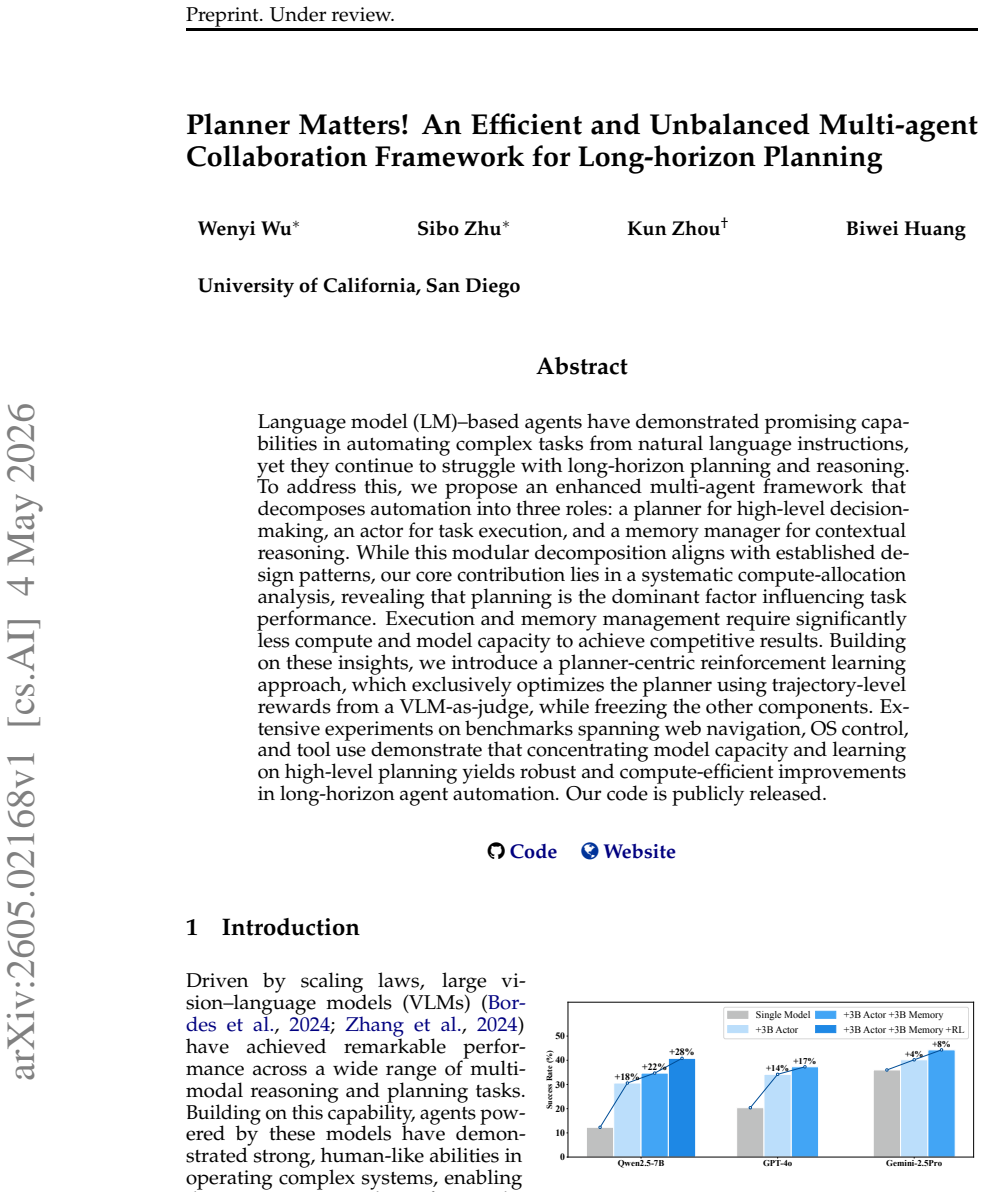
Language model (LM)-based agents have demonstrated promising capabilities in automating complex tasks from natural language instructions, yet they continue to struggle with long-horizon planning and reasoning. To address this, we propose an enhanced multi-agent framework that decomposes automation into three roles: a planner for high-level decision-making, an actor for task execution, and a memory manager for contextual reasoning. While this modular decomposition aligns with established design patterns, our core contribution lies in a systematic compute-allocation analysis, revealing that planning is the dominant factor influencing task performance. Execution and memory management require significantly less compute and model capacity to achieve competitive results. Building on these insights, we introduce a planner-centric reinforcement learning approach, which exclusively optimizes the planner using trajectory-level rewards from a VLM-as-judge, while freezing the other components. Extensive experiments on benchmarks spanning web navigation, OS control, and tool use demonstrate that concentrating model capacity and learning on high-level planning yields robust and compute-efficient improvements in long-horizon agent automation. Our code is publicly released.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces an unbalanced multi-agent framework for LM agents with planner, actor, and memory manager. A compute-allocation analysis identifies planning as the key bottleneck and performance driver. Based on this, they develop a planner-centric RL approach that optimizes only the planner using VLM-provided trajectory rewards while keeping actor and memory frozen. Experiments on web navigation, OS control, and tool-use benchmarks are reported to show improved performance and efficiency in long-horizon tasks.
Significance. Should the findings prove robust, this work offers a practical and efficient paradigm for scaling LM agents by focusing learning and capacity on high-level planning rather than uniform optimization. The release of code is a positive contribution to the field, enabling reproducibility and extension. It challenges the default of balanced multi-agent designs and provides empirical support for planner-centric approaches.
major comments (2)
- Experiments section: The manuscript reports positive experimental outcomes on three benchmark categories but does not include quantitative results, specific baselines, error bars, or details on the compute-allocation analysis methodology. This makes it challenging to verify the claimed dominance of planning and the improvements from the RL approach.
- Method section (VLM-as-Judge): The planner-centric RL relies on trajectory-level rewards from a VLM-as-judge, but there is no validation of the judge's reliability, such as correlation with human judgments, inter-rater agreement, or comparison to oracle rewards. This is a load-bearing issue for the central claim, as biases in the judge could lead to the planner exploiting artifacts rather than achieving genuine task improvements.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the positive assessment of the work's potential significance. We agree that strengthening the experimental reporting and validating the VLM-as-judge are important for robustness. We address each major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: Experiments section: The manuscript reports positive experimental outcomes on three benchmark categories but does not include quantitative results, specific baselines, error bars, or details on the compute-allocation analysis methodology. This makes it challenging to verify the claimed dominance of planning and the improvements from the RL approach.
Authors: We acknowledge that the current presentation of results could be more detailed for independent verification. The manuscript does report outcomes across web navigation, OS control, and tool-use benchmarks with comparisons to baselines, but we will expand the Experiments section in revision to include explicit quantitative tables (e.g., success rates, efficiency metrics), error bars from repeated runs, and a dedicated subsection detailing the compute-allocation analysis methodology (including how per-component token/FLOP usage was measured and how planning was identified as the bottleneck). This will directly support the claims of planner dominance and RL gains. revision: yes
-
Referee: Method section (VLM-as-Judge): The planner-centric RL relies on trajectory-level rewards from a VLM-as-judge, but there is no validation of the judge's reliability, such as correlation with human judgments, inter-rater agreement, or comparison to oracle rewards. This is a load-bearing issue for the central claim, as biases in the judge could lead to the planner exploiting artifacts rather than achieving genuine task improvements.
Authors: We agree this is a critical point. The VLM-as-judge enables scalable trajectory rewards for long-horizon tasks where dense human feedback is impractical, and the unbalanced design (freezing actor/memory) limits the planner's ability to exploit low-level artifacts. In the revised manuscript we will add an appendix with a validation study on a sampled subset of trajectories, reporting Pearson/Spearman correlations with human expert judgments, inter-rater agreement (e.g., Cohen's kappa), and, where benchmark oracles exist, performance comparisons against oracle-reward training. We will also discuss observed biases and mitigation strategies. revision: yes
Circularity Check
No significant circularity; empirical RL against external judge
full rationale
The paper presents a modular multi-agent framework (planner/actor/memory) whose central contribution is an empirical compute-allocation study followed by planner-centric RL that optimizes only the planner against trajectory rewards supplied by an external VLM-as-judge while freezing the remaining components. No equations, derivations, or predictions are supplied that reduce by construction to fitted parameters, self-definitions, or self-citations. The method is therefore self-contained: performance claims rest on benchmark experiments rather than any internal re-labeling of inputs as outputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
URLhttps://arxiv.org/abs/2505.05470. Run Luo, Lu Wang, Wanwei He, Longze Chen, Jiaming Li, and Xiaobo Xia. Gui-r1: A gener- alist r1-style vision-language action model for gui agents.arXiv preprint arXiv:2504.10458, 2025. Earl K. Miller and Jonathan D. Cohen. An integrative theory of prefrontal cortex function. Annual Review of Neuroscience, 24:167–202, 2...
-
[2]
URLhttps://arxiv.org/abs/2408.07199. Zehan Qi, Xiao Liu, Iat Long Iong, Hanyu Lai, Xueqiao Sun, Wenyi Zhao, Yu Yang, Xinyue Yang, Jiadai Sun, Shuntian Yao, Tianjie Zhang, Wei Xu, Jie Tang, and Yuxiao Dong. Webrl: Training llm web agents via self-evolving online curriculum reinforcement learning, 2025. URLhttps://arxiv.org/abs/2411.02337. Chen Qian, Wei Li...
-
[3]
Tasks that were valid months ago may no longer be feasible in their original form
Dynamic web environments: Real-world websites change continuously, such as page layouts, product listings, UI elements, and even entire website structures are updated frequently. Tasks that were valid months ago may no longer be feasible in their original form. Our evaluation is conducted on live websites at the time of our experiments, meaning the diffic...
-
[4]
Step limit: We enforce a strict 15-step limit for all methods and models, which is more restrictive than some prior work that allows 50-100 steps
-
[5]
Our framework uses the same configuration across all evaluation domains
No website-specific optimization: We do not fine-tune prompts, action spaces, or mem- ory banks to specific websites. Our framework uses the same configuration across all evaluation domains
-
[6]
Fair comparison environment: All methods and models in our evaluation, including closed-source baselines, open-source models, memory-augmented variants, and our multi-agent framework, are evaluated under identical conditions (same websites, same tasks, same step limits, same evaluation time window). This ensures that performance differences reflect genuin...
work page 2023
-
[7]
Is concise and actionable
-
[8]
Breaks down the task into clear, sequential steps
-
[9]
Plan update instruction You are a task planning assistant
Uses insights from similar experiences when relevant Format your response as a numbered list of steps. Plan update instruction You are a task planning assistant. Update the original plan based on recent observations and actions. Experience Memory: {DISCRETE MEMORY} Original Plan: {PLAN} Recent Screenshot Observations: {SCREENSHOTS} Recent Actions: {ACTION...
-
[10]
Reflect what has been accomplished
-
[11]
Adjust remaining steps based on current progress
-
[12]
Keep it concise (3-5 steps total)
-
[13]
If the task is finished, yield STOP
Clearly state the next single step. If the task is finished, yield STOP
-
[14]
Output format: <plan>Your updated plan here</plan> <subgoal>next single step</subgoal> 21 Preprint
Do NOT repeat actions that have already failed. Output format: <plan>Your updated plan here</plan> <subgoal>next single step</subgoal> 21 Preprint. Under review. Action generation prompt System instruction You are a helpful execution agent following the given plan. Task: {QUERY} Plan: {PLAN} Available Actions: {ACTION_SPACE} Constraints:
-
[15]
Follow the plan step by step
-
[16]
Specify the element number to interact with
-
[17]
Don't repeat failed actions
-
[18]
Provide an answer within the remaining steps
-
[19]
Output one action at a time. Memory check and update prompt Input prompt You are helping a GUI agent decide if it should look for different reference experiences. Original Task: {QUERY} Recent Observations: {SCREENSHOTS} Recent Actions: {ACTIONS} Current Memories: {DISCRETE MEMORY} Rules:
-
[20]
Memories are loose references - they don't need to match perfectly
-
[21]
If current memories are related, output NO_UPDATE
-
[22]
Only output NEEDS_UPDATE if the agent moved to a completely different activity type. Output: "NO_UPDATE" or "NEEDS_UPDATE: <2-5 keywords>" 22 Preprint. Under review. VLM-as-Judge Evaluation Prompt System instruction You are an expert at analyzing web browsing task completion from screenshots. You will be given a task instruction and a series of screenshot...
-
[23]
First, understand the task instruction. Describe what successful task completion should look like (i.e., what the final screenshot should show)
-
[24]
For each screenshot, analyze: - What is visible on the page (URL, elements, forms, buttons, messages, etc.) - What action the user performed (click, type, scroll, etc.) - Whether and how the action contributed to progress (or caused mistakes)
-
[25]
Carefully observe URL bars, form fields, search boxes, buttons, error messages, results, and confirmation screens
-
[26]
After analyzing all screenshots, provide your reasoning about: - Whether the task was completed - How clear, logical, and efficient the interaction sequence was - Whether actions were redundant or irrelevant Then, assign a score using this 3-level scale: SCORING SCALE: - 5 -- Task Fully Completed and Efficiently Done - The final screenshot shows the task ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.