Say the Mission, Execute the Swarm: Agent-Enhanced LLM Reasoning in the Web-of-Drones
Pith reviewed 2026-05-07 16:25 UTC · model grok-4.3
The pith
Task-specific planning tools and runtime guardrails enable LLMs to reliably execute natural language UAV swarm missions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
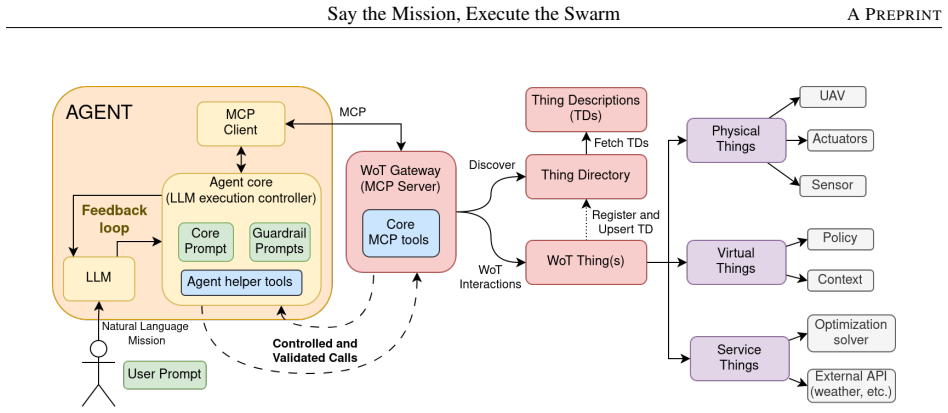
The architecture integrates an LLM Agent Core with an MCP gateway and a Web-of-Drones based on W3C WoT standards to support grounded, real-time interactions for swarm control. Evaluation in ArduPilot simulations across four missions and six LLMs indicates that general-purpose models struggle with reliable closed-loop execution absent explicit grounding and support mechanisms, but that adding task-specific planning tools and runtime guardrails substantially enhances robustness, and that token consumption does not correlate with execution quality or reliability.
What carries the argument
The MCP gateway and Web-of-Drones WoT abstraction that converts heterogeneous drone interfaces into standardized tools for continuous state observation and safe actuation without code generation.
Load-bearing premise
The MCP gateway and Web-of-Drones abstraction supply sufficient structured, real-time grounding for LLMs to perform long-running closed-loop swarm execution without code generation.
What would settle it
Running the four swarm missions in ArduPilot simulation with and without task-specific planning tools and runtime guardrails, then comparing the resulting mission success rates, would show whether those additions are required for reliable performance.
Figures




read the original abstract
Large Language Models (LLMs) are increasingly explored as high-level reasoning engines for cyber-physical systems, yet their application to real-time UAV swarm management remains challenging due to heterogeneous interfaces, limited grounding, and the need for long-running closed-loop execution. This paper presents a mission-agnostic, agent-enhanced LLM framework for UAV swarm control, where users express mission objectives in natural language and the system autonomously executes them through grounded, real-time interactions. The proposed architecture combines an LLM-based Agent Core with a Model Context Protocol (MCP) gateway and a Web-of-Drones abstraction based on W3C Web of Things (WoT) standards. By exposing drones, sensors, and services as standardized WoT Things, the framework enables structured tool-based interaction, continuous state observation, and safe actuation without relying on code generation. We evaluate the framework using ArduPilot-based simulation across four swarm missions and six state-of-the-art LLMs. Results show that, despite strong reasoning abilities, current general-purpose LLMs still struggle to achieve reliable execution - even for simple swarm tasks - when operating without explicit grounding and execution support. Task-specific planning tools and runtime guardrails substantially improve robustness, while token consumption alone is not indicative of execution quality or reliability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an agent-enhanced LLM framework for UAV swarm control where users specify missions in natural language. The architecture combines an LLM-based Agent Core with a Model Context Protocol (MCP) gateway and a W3C Web of Things (WoT)-based Web-of-Drones abstraction to enable structured tool interactions, continuous state observation, and safe actuation without code generation. Evaluation uses ArduPilot simulation across four swarm missions and six LLMs, claiming that general-purpose LLMs struggle with reliable execution absent grounding, but that task-specific planning tools and runtime guardrails substantially improve robustness while token consumption does not indicate execution quality.
Significance. If the empirical results are substantiated with quantitative detail, the work could meaningfully advance LLM integration with cyber-physical systems by demonstrating a standardized, mission-agnostic grounding layer for swarm execution. It provides concrete evidence of the gap between raw LLM reasoning and reliable closed-loop control, which may guide future architectural choices in robotics and autonomous agents.
major comments (2)
- Abstract and Evaluation section: The central claim that task-specific planning tools and runtime guardrails substantially improve robustness across six LLMs and four missions lacks supporting quantitative metrics, baselines, error analysis, or explicit description of how reliability was measured, leaving the primary empirical assertion only partially supported.
- Architecture and Evaluation sections: The claim that the MCP gateway plus Web-of-Drones WoT abstraction supplies sufficient structured, real-time primitives for long-running closed-loop swarm execution without code generation rests on an untested assumption; the simulation results on four missions do not demonstrate sustained observation-actuation loops if the exposed Thing interfaces are limited to high-level commands, risking implicit sequencing that contradicts the no-code-generation design.
minor comments (2)
- Define all acronyms (MCP, WoT, UAV, LLM) at first use and ensure consistent terminology between the abstract and body.
- Add a brief related-work subsection contrasting the proposed Web-of-Drones abstraction with prior LLM-robot interfaces or WoT drone applications.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments have helped us strengthen the empirical support and architectural clarity in the manuscript. We address each major comment below and have made corresponding revisions.
read point-by-point responses
-
Referee: Abstract and Evaluation section: The central claim that task-specific planning tools and runtime guardrails substantially improve robustness across six LLMs and four missions lacks supporting quantitative metrics, baselines, error analysis, or explicit description of how reliability was measured, leaving the primary empirical assertion only partially supported.
Authors: We agree that the original presentation of results would benefit from greater quantitative rigor. In the revised manuscript, we have added a new subsection to the Evaluation section that (1) explicitly defines reliability as the percentage of fully autonomous mission completions (no human intervention required) across repeated trials, (2) reports baseline comparisons for all six LLMs with and without the planning tools and guardrails, (3) provides an error analysis categorizing failures into planning, observation, actuation, and timeout modes, and (4) includes tabulated success rates, average completion steps, and token usage for each mission-LLM pair. These additions directly substantiate the claim with concrete metrics from the ArduPilot simulations. revision: yes
-
Referee: Architecture and Evaluation sections: The claim that the MCP gateway plus Web-of-Drones WoT abstraction supplies sufficient structured, real-time primitives for long-running closed-loop swarm execution without code generation rests on an untested assumption; the simulation results on four missions do not demonstrate sustained observation-actuation loops if the exposed Thing interfaces are limited to high-level commands, risking implicit sequencing that contradicts the no-code-generation design.
Authors: We thank the referee for identifying this potential point of ambiguity. The Web-of-Drones WoT abstraction exposes both high-level commands and low-level primitives (real-time telemetry as observable Properties and velocity/mode updates as Actions). The MCP gateway supports continuous state polling and event-driven updates, enabling the agent to perform explicit observation-actuation cycles. In the revised manuscript we have (1) expanded the Architecture section with a detailed interface specification and an example closed-loop cycle, and (2) added execution traces in the Evaluation section for one mission that illustrate multiple iterations of state observation followed by targeted tool calls, without any code generation. These traces demonstrate that sequencing occurs through repeated, explicit tool invocations rather than implicit or generated sequences. We note that while the simulations support sustained loops, extended real-world endurance testing remains future work. revision: yes
Circularity Check
No significant circularity in architectural framework and empirical evaluation
full rationale
The paper describes an agent-enhanced LLM framework using MCP gateway and W3C WoT abstractions for UAV swarm control, then reports ArduPilot simulation results across four missions and six LLMs. No mathematical derivations, equations, fitted parameters, or self-referential claims appear in the abstract or described content. Central claims about robustness from task-specific tools and guardrails rest on empirical outcomes rather than reducing to inputs by construction. No self-citation load-bearing steps, uniqueness theorems, or ansatz smuggling are present. The work is self-contained as an engineering architecture paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLMs can utilize structured tool interfaces to perform closed-loop control when provided with continuous state observation
invented entities (1)
-
Web-of-Drones abstraction
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Z. Kaleem, F. A. Orakzai, W. Ishaq, K. Latif, J. Zhao, and A. Jamalipour, “Emerging trends in uavs: From placement, semantic communications to generative ai for mission-critical networks,”IEEE Transactions on Consumer Electronics, vol. 71, no. 3, pp. 7412–7438, 2025
work page 2025
-
[2]
Joint coverage, connectivity, and charging strategies for distributed uav networks,
A. Trotta, M. D. Felice, F. Montori, K. R. Chowdhury, and L. Bononi, “Joint coverage, connectivity, and charging strategies for distributed uav networks,”IEEE Transactions on Robotics, vol. 34, no. 4, pp. 883–900, 2018
work page 2018
-
[3]
Chatgpt for robotics: Design principles and model abilities,
S. H. Vemprala, R. Bonatti, A. Bucker, and A. Kapoor, “Chatgpt for robotics: Design principles and model abilities,”IEEE Access, vol. 12, pp. 55 682–55 696, 2024
work page 2024
-
[4]
Uavs meet llms: Overviews and perspectives towards agentic low-altitude mobility,
Y . Tian, F. Lin, Y . Li, T. Zhang, Q. Zhang, X. Fu, J. Huang, X. Dai, Y . Wang, C. Tian, B. Li, Y . Lv, L. Kovács, and F.-Y . Wang, “Uavs meet llms: Overviews and perspectives towards agentic low-altitude mobility,”Information Fusion, vol. 122, p. 103158, 2025
work page 2025
-
[5]
Llm-daas: Llm-driven drone-as-a-service operations from text user requests,
L. Wassim, K. Mohamed, and A. Hamdi, “Llm-daas: Llm-driven drone-as-a-service operations from text user requests,” inAdvances on Intelligent Computing and Data Science II, F. Saeed, F. Mohammed, E. Mohammed, S. Basurra, and M. Al-Sarem, Eds. Cham: Springer Nature Switzerland, 2025, pp. 108–121
work page 2025
-
[6]
Swarm-gpt: Combining large language models with safe motion planning for robot choreography design,
A. Jiao, T. P. Patel, S. Khurana, A.-M. Korol, L. Brunke, V . K. Adajania, U. Culha, S. Zhou, and A. P. Schoellig, “Swarm-gpt: Combining large language models with safe motion planning for robot choreography design,” 2023. [Online]. Available: https://arxiv.org/abs/2312.01059
-
[7]
Gsce: a prompt framework with enhanced reasoning for reliable llm-driven drone control,
W. Wang, Y . Li, L. Jiao, and J. Yuan, “Gsce: a prompt framework with enhanced reasoning for reliable llm-driven drone control,” in2025 International Conference on Unmanned Aircraft Systems (ICUAS), 2025, pp. 441–448
work page 2025
-
[8]
Large language model-driven closed-loop uav operation with semantic observations,
——, “Large language model-driven closed-loop uav operation with semantic observations,”IEEE Internet of Things Journal, pp. 1–1, 2025
work page 2025
-
[9]
Smart-llm: Smart multi-agent robot task planning using large language models,
S. S. Kannan, V . L. N. Venkatesh, and B.-C. Min, “Smart-llm: Smart multi-agent robot task planning using large language models,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 12 140–12 147
work page 2024
-
[10]
Llm-powered swarms: A new frontier or a conceptual stretch?
M. A. U. Rahman, M. Schranz, and S. Hayat, “Llm-powered swarms: A new frontier or a conceptual stretch?”
-
[11]
Available: https://arxiv.org/abs/2506.14496
[Online]. Available: https://arxiv.org/abs/2506.14496
-
[12]
A survey on the web of things,
L. Sciullo, L. Gigli, F. Montori, A. Trotta, and M. Di Felice, “A survey on the web of things,”IEEE access, vol. 10, pp. 47 570–47 596, 2022. 14 Say the Mission, Execute the SwarmA PREPRINT
work page 2022
-
[13]
Q. Lu, L. Zhu, J. Whittle, and X. Xu,Responsible AI: Best Practices for Creating Trustworthy AI Systems, 1st ed. Addison-Wesley Professional, 2023
work page 2023
-
[14]
Talk less, fly lighter: Autonomous semantic compression for uav swarm communication via llms,
F. Lin, T. Zhang, Q. Ni, J. Huang, S. Ma, Y . Tian, Y . Lv, and N. Wu, “Talk less, fly lighter: Autonomous semantic compression for uav swarm communication via llms,” in2025 21st IEEE International Conference on Mechatronic and Embedded Systems and Applications (MESA), 2025, pp. 29–34
work page 2025
-
[15]
Flockgpt: Guiding uav flocking with linguistic orchestration,
A. Lykov, S. Karaf, M. Martynov, V . Serpiva, A. Fedoseev, M. Konenkov, and D. Tsetserukou, “Flockgpt: Guiding uav flocking with linguistic orchestration,” in2024 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), 2024, pp. 485–488
work page 2024
-
[16]
Swarmchain: Collaborative llm inference for uav swarm control,
B. Han, Y . Chen, J. Li, J. Li, and J. Su, “Swarmchain: Collaborative llm inference for uav swarm control,”IEEE Internet of Things Magazine, vol. 8, no. 5, pp. 64–71, 2025
work page 2025
-
[17]
Progprompt: Generating situated robot task plans using large language models,
I. Singh, V . Blukis, A. Mousavian, A. Goyal, D. Xu, J. Tremblay, D. Fox, J. Thomason, and A. Garg, “Progprompt: Generating situated robot task plans using large language models,” in2023 IEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 11 523–11 530
work page 2023
-
[18]
Llm-mage: A generative mashup planner for the web of things,
F. Salama, F. J. Ennemoser, R. Binkert, E. Korkan, S. Käbisch, and S. Steinhorst, “Llm-mage: A generative mashup planner for the web of things,” inWeb Engineering, H. Verma, A. Bozzon, A. Mauri, and J. Yang, Eds. Cham: Springer Nature Switzerland, 2026, pp. 342–357
work page 2026
-
[19]
Model context protocol specification,
Anthropic, “Model context protocol specification,” https://modelcontextprotocol.io/specification/2025-11-25, Nov. 2025, version 2025-11-25, accessed 2026-01-27
work page 2025
-
[20]
Zion: A scalable w3c web of things directory,
C. Aguzzi, L. Gigli, I. Zyrianoff, and L. Roffia, “Zion: A scalable w3c web of things directory,” in2024 IEEE 21st Consumer Communications & Networking Conference (CCNC). IEEE, 2024, pp. 1–6. 15
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.