Recognition: 2 theorem links
· Lean TheoremSatSurfGS: Generalizable 2D Gaussian Splatting for Sparse-View Satellite Surface Reconstruction
Pith reviewed 2026-05-11 01:06 UTC · model grok-4.3
The pith
SatSurfGS reconstructs satellite surfaces from sparse views by predicting 2D Gaussian attributes through three-level local geometric reliability modeling.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
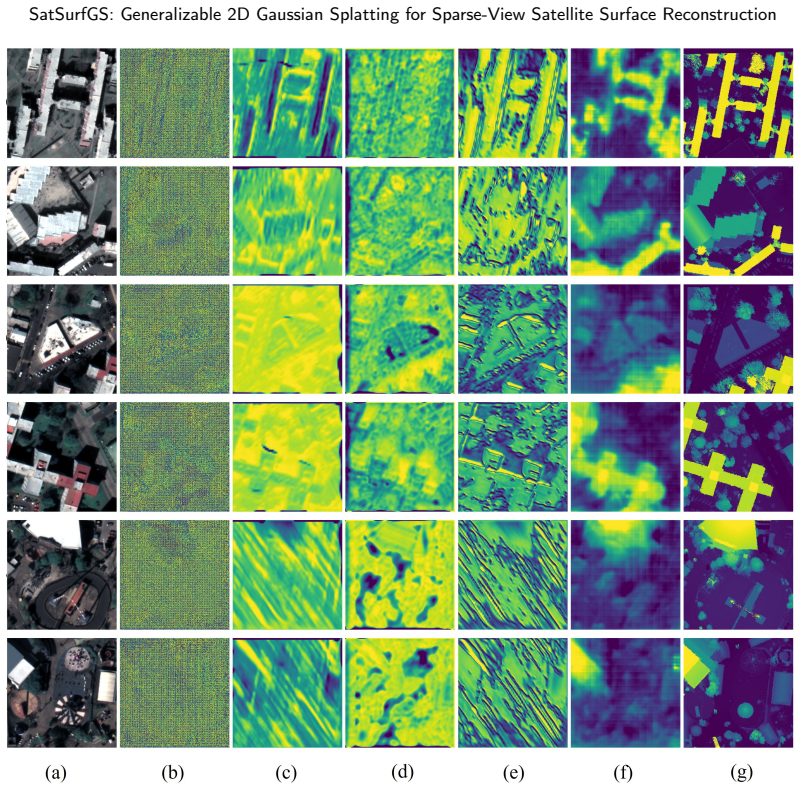
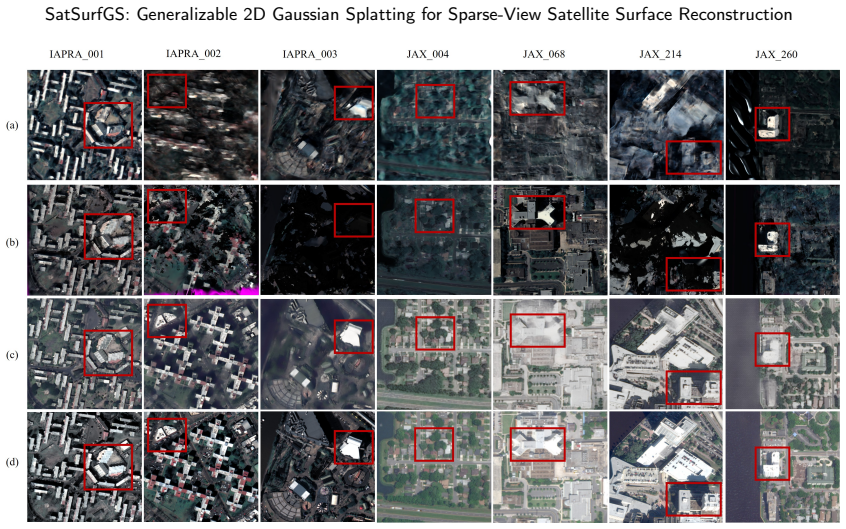
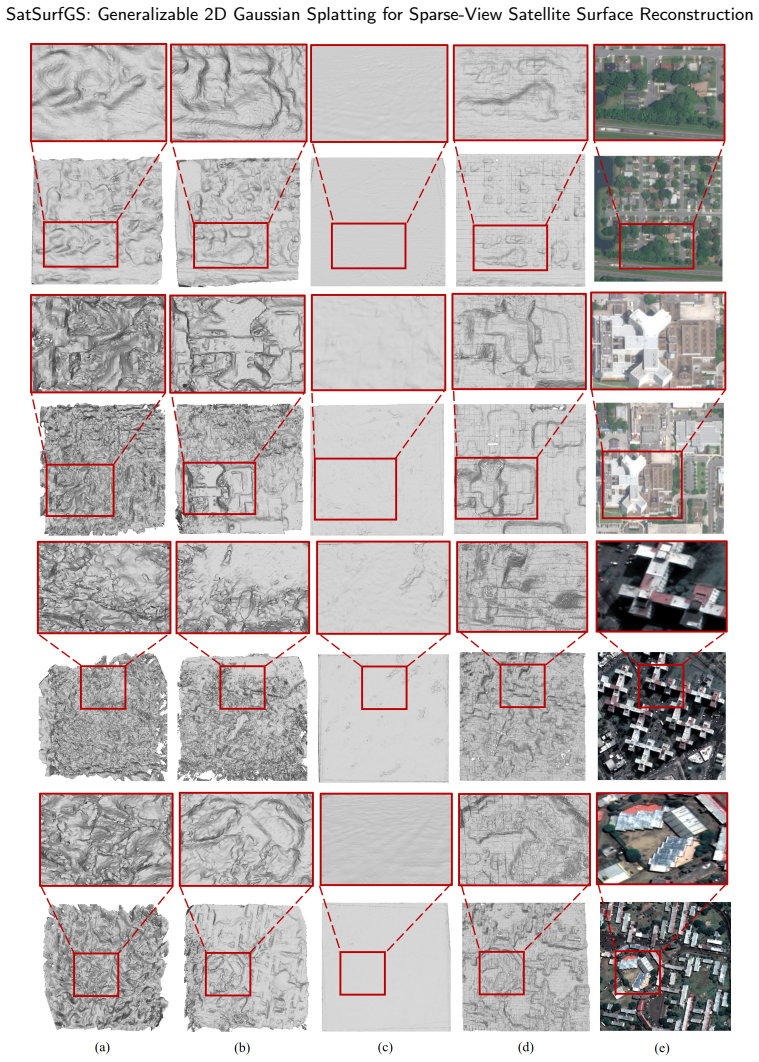
SatSurfGS constructs a coarse-to-fine 2D Gaussian Splatting pipeline for sparse-view satellite surface reconstruction that explicitly models local geometric reliability at three stages: a confidence-aware monocular multi-view feature fusion module that weights monocular priors against multi-view matches; a cross-stage self-consistency residual guidance module that stabilizes refinement using height-map residuals and confidence; and a confidence bidirectional routing loss that assigns differentiated geometric and appearance supervision. Experiments demonstrate that this yields improved rendering quality, surface reconstruction accuracy, cross-dataset generalization, and inference efficiency.
What carries the argument
The three-level confidence modeling framework that adaptively fuses monocular priors with multi-view residuals during feature learning, Gaussian parameter estimation, and bidirectional loss supervision.
If this is right
- Rendering quality and geometric accuracy improve on satellite test sets relative to both generalizable and per-scene baselines.
- Cross-dataset generalization holds without retraining or per-scene optimization.
- Inference runs faster than methods that optimize Gaussians separately for each scene.
- Sparse-view inputs become more practical for large-scale satellite surface mapping tasks.
Where Pith is reading between the lines
- The same reliability-modeling pattern could be tested on other sparse multi-view domains such as aerial or ground-level imagery with similar photometric inconsistencies.
- If the confidence estimates prove stable, future pipelines might reduce the minimum number of required satellite views while maintaining accuracy.
- Integration with streaming satellite feeds could enable near-real-time surface change detection without full re-optimization per frame.
Load-bearing premise
Local geometric reliability can be estimated reliably enough from monocular priors and multi-view residuals that the three-level modeling generalizes to new satellite datasets without introducing fresh failure modes.
What would settle it
Performance comparison on an unseen satellite dataset captured under different sensors or lighting conditions where the method shows no improvement in surface accuracy or cross-dataset transfer over strong baselines.
Figures










read the original abstract
Sparse-view satellite image surface reconstruction remains highly challenging, fundamentally because the reliability of multi-view matching under satellite imaging conditions is strongly spatially heterogeneous. Affected by large photometric differences, weak textures, and repetitive textures, multi-view geometric constraints are often sparse, unevenly distributed, and locally unreliable. Although 2D Gaussian Splatting (2DGS) is more suitable than 3D Gaussian Splatting (3DGS) for the explicit representation of continuous surfaces, research on generalizable feed-forward 2DGS frameworks for sparse-view satellite surface reconstruction is still lacking. To address this issue, we propose SatSurfGS, a generalizable sparse-view surface reconstruction method for satellite imagery based on 2DGS. The proposed method builds a coarse-to-fine Gaussian attribute prediction framework and explicitly models local geometric reliability at three levels: feature learning, Gaussian parameter estimation, and training optimization. Specifically, we propose a confidence-aware monocular multi-view feature fusion module to adaptively integrate monocular priors and multi-view matching features according to local confidence; a cross-stage self-consistency residual guidance module to stabilize stage-wise Gaussian parameter refinement using the residual between the rendered height map from the previous stage and the current-stage MVS height map, together with confidence information; and a confidence bidirectional routing loss to achieve differentiated allocation of geometric and appearance supervision. Experiments on satellite datasets show that the proposed method achieves improved rendering quality, surface reconstruction accuracy, cross-dataset generalization, and inference efficiency compared with representative generalizable baselines and competitive per-scene optimization methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SatSurfGS, a generalizable feed-forward 2D Gaussian Splatting framework for sparse-view satellite surface reconstruction. It introduces a coarse-to-fine Gaussian attribute prediction pipeline with explicit three-level confidence modeling to handle spatially heterogeneous multi-view reliability caused by photometric differences, weak textures, and repetitive patterns. The key modules are a confidence-aware monocular multi-view feature fusion module, a cross-stage self-consistency residual guidance module that uses residuals between prior-stage rendered height maps and current MVS height maps, and a confidence bidirectional routing loss for differentiated geometric and appearance supervision. Experiments on satellite datasets are claimed to show gains in rendering quality, surface accuracy, cross-dataset generalization, and inference speed over generalizable baselines and per-scene optimization methods.
Significance. If the central claims hold under rigorous validation, the work would be significant for satellite 3D reconstruction, where sparse views and imaging artifacts make standard multi-view stereo unreliable. The shift to a generalizable 2DGS approach with multi-stage confidence modeling offers a practical alternative to slow per-scene optimization and directly targets the core problem of locally unreliable geometric constraints. Strengths include the explicit handling of monocular priors alongside multi-view features and the focus on surface representation via 2DGS.
major comments (2)
- [Abstract / §3] Abstract and §3 (cross-stage self-consistency residual guidance module): the module computes residuals between the previous-stage rendered height map and the current-stage MVS height map to refine Gaussian parameters. Because MVS height maps are generated under the same photometric differences, weak/repetitive textures, and sparse correspondences that the paper identifies as making multi-view constraints locally unreliable, any systematic error in those maps risks being propagated rather than corrected. The three-level confidence modeling is intended to down-weight unreliable regions, but the manuscript provides no ablation, error propagation analysis, or visualization demonstrating that monocular priors and the bidirectional loss can reliably distinguish MVS artifacts from true geometry at the scale needed for stable refinement.
- [§4] §4 (Experiments): the abstract states that the method achieves improved rendering quality, surface reconstruction accuracy, cross-dataset generalization, and inference efficiency, yet the provided description contains no numerical metrics, specific baseline implementations, ablation results on the individual confidence components, or error analysis. Without these, it is impossible to determine whether the reported gains are robust or sensitive to dataset selection and metric choice, which directly affects the load-bearing claim of superior performance.
minor comments (2)
- [Abstract] The abstract would be strengthened by including at least one or two key quantitative results (e.g., PSNR or Chamfer distance deltas) to support the performance claims.
- [§3] Notation for the three-level confidence (feature fusion, parameter estimation, bidirectional loss) should be introduced consistently with symbols in the method section to avoid ambiguity when reading the loss formulation.
Simulated Author's Rebuttal
We sincerely thank the referee for the constructive and detailed feedback. We address each major comment below and describe the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract / §3] Abstract and §3 (cross-stage self-consistency residual guidance module): the module computes residuals between the previous-stage rendered height map and the current-stage MVS height map to refine Gaussian parameters. Because MVS height maps are generated under the same photometric differences, weak/repetitive textures, and sparse correspondences that the paper identifies as making multi-view constraints locally unreliable, any systematic error in those maps risks being propagated rather than corrected. The three-level confidence modeling is intended to down-weight unreliable regions, but the manuscript provides no ablation, error propagation analysis, or visualization demonstrating that monocular priors and the bidirectional loss can reliably distinguish MVS artifacts from true geometry at the scale needed for stable refinement.
Authors: We appreciate this important observation on the risk of error propagation in the cross-stage residual guidance module. The three-level confidence modeling (feature, parameter, and loss stages) together with monocular priors and the bidirectional routing loss are intended to down-weight unreliable MVS regions and provide complementary geometric cues. However, we acknowledge that the current manuscript does not include dedicated ablations, error-propagation analysis, or visualizations to empirically demonstrate stable refinement. In the revised version we will add: (i) ablation tables isolating the residual guidance module with and without confidence weighting, (ii) visualizations of per-stage confidence maps overlaid on MVS residual errors, and (iii) quantitative metrics tracking refinement stability across stages. These additions will directly address the concern. revision: yes
-
Referee: [§4] §4 (Experiments): the abstract states that the method achieves improved rendering quality, surface reconstruction accuracy, cross-dataset generalization, and inference efficiency, yet the provided description contains no numerical metrics, specific baseline implementations, ablation results on the individual confidence components, or error analysis. Without these, it is impossible to determine whether the reported gains are robust or sensitive to dataset selection and metric choice, which directly affects the load-bearing claim of superior performance.
Authors: We agree that detailed quantitative validation is essential. While the full manuscript contains Section 4 with comparative tables (PSNR/SSIM for rendering, surface RMSE for accuracy, runtime for efficiency, and cross-dataset results), we recognize that the current presentation lacks exhaustive per-component ablations, explicit baseline implementation details, and sensitivity/error analysis. In the revision we will expand Section 4 to include: comprehensive ablation tables for each proposed module, precise descriptions of baseline re-implementations, additional error-distribution plots, and sensitivity tests across dataset subsets and metric choices. This will make the performance claims fully substantiated and reproducible. revision: yes
Circularity Check
No significant circularity; novel architecture with external empirical validation.
full rationale
The paper introduces a new coarse-to-fine 2DGS framework with three explicitly proposed modules (confidence-aware feature fusion, cross-stage residual guidance, and bidirectional routing loss) for sparse-view satellite reconstruction. These are architectural and loss-design choices whose claimed benefits are measured via rendering and reconstruction metrics on held-out satellite datasets against independent baselines and per-scene optimizers. No equation reduces a predicted quantity to a fitted parameter defined from the same data, no load-bearing premise rests solely on self-citation, and no uniqueness theorem or ansatz is imported from the authors' prior work to force the result. The derivation chain is therefore self-contained and non-circular.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
we propose a confidence-aware monocular multi-view feature fusion module... cross-stage self-consistency residual guidance module... confidence bidirectional routing loss
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the cost-volume confidence is used as a proxy for local geometric reliability
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Mip-nerf 360: Unbounded anti-aliased neural radiance fields, in: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 5470–5479. Barron,J.T.,Mildenhall,B.,Verbin,D.,Srinivasan,P.P.,Hedman,P.,2023. Zip-nerf:Anti-aliasedgrid-basedneuralradiancefields,in:Proceedings of the IEEE/CVF International Conference on Computer Vision...
work page 2023
-
[2]
Semantic stereo for incidental satellite images, in: 2019 IEEE Winter Conference on Applications of Computer Vision (WACV), IEEE. pp. 1524–1532. Bosch, M., Kurtz, Z., Hagstrom, S., Brown, M.,
work page 2019
-
[3]
A multiple view stereo benchmark for satellite imagery, in: 2016 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), IEEE. pp. 1–9. Charatan, D., Li, S.L., Tagliasacchi, A., Sitzmann, V.,
work page 2016
-
[4]
Splatter-360: Generalizable 360 gaussian splatting for wide-baseline panoramic images, in: Proceedings of the Computer Vision and Pattern Recognition Conference, pp. 21590–21599. Cheng,S.,Xu,Z.,Zhu,S.,Li,Z.,Li,L.E.,Ramamoorthi,R.,Su,H.,2020. Deepstereousingadaptivethinvolumerepresentationwithuncertainty awareness, in: Proceedings of the IEEE/CVF conferenc...
work page 2020
-
[5]
ISPRS Journal of Photogrammetry and Remote Sensing 232, 124–137
3d building reconstruction from monocular remote sensing imagery via diffusion models and geometric priors. ISPRS Journal of Photogrammetry and Remote Sensing 232, 124–137. Huang,B.,Yu,Z.,Chen,A.,Geiger,A.,Gao,S.,2024. 2dgaussiansplattingforgeometricallyaccurateradiancefields,in:ACMSIGGRAPH2024 conference papers, pp. 1–11. Huang, X., Liu, X., Wan, Y., Zhe...
work page 2024
-
[6]
Gaussian entropy fields: Driving adaptive sparsity in 3d gaussian optimization. ISPRS Journal of Photogrammetry and Remote Sensing 236, 273–285. Lee,J.Y.,Liu,Y.R.,Tsai,S.R.,Chang,W.C.,Wu,C.H.,Chan,J.,Zhao,Z.,Lin,C.H.,Liu,Y.L.,2025. Skyfall-gs:Synthesizingimmersive3durban scenes from satellite imagery. arXiv preprint arXiv:2510.15869 . Li, Z., Yao, S., Wu,...
-
[7]
ISPRSJournalofPhotogrammetryandRemoteSensing230,861–880
Ulsr-gs: Urban large-scale surface reconstructiongaussiansplattingwithmulti-viewgeometricconsistency. ISPRSJournalofPhotogrammetryandRemoteSensing230,861–880. Liu,Z.,Niu,S.,Qiu,X.,Peng,L.,Shang,Y.,Zhong,L.,Ding,C.,2026. Adifferentiablemethodfornovelviewsarimagegenerationvia3dgaussian splatting. ISPRS Journal of Photogrammetry and Remote Sensing 231, 167–1...
work page 2026
-
[8]
arXiv preprint arXiv:2505.22279
Learning fine-grained geometry for sparse-view splatting via cascade depth loss. arXiv preprint arXiv:2505.22279 . Marí, R., Facciolo, G., Ehret, T.,
-
[9]
Sat-nerf: Learning multi-view satellite photogrammetry with transient objects and shadow modeling using rpc cameras, in: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 1311–1321. Marí,R.,Facciolo,G.,Ehret,T.,2023. Multi-dateearthobservationnerf:Thedetailisintheshadows,in:ProceedingsoftheIEEE/CVFConference on Compute...
work page 2023
-
[10]
Instant neural graphics primitives with a multiresolution hash encoding. ACM transactions on graphics (TOG) 41, 1–15. Newcombe,R.A.,Izadi,S.,Hilliges,O.,Molyneaux,D.,Kim,D.,Davison,A.J.,Kohi,P.,Shotton,J.,Hodges,S.,Fitzgibbon,A.,2011.Kinectfusion: Real-timedensesurfacemappingandtracking,in:201110thIEEEinternationalsymposiumonmixedandaugmentedreality,Ieee....
-
[11]
Hisplat: Hierarchical 3d gaussian splatting for generalizable sparse-view reconstruction. arXiv preprint arXiv:2410.06245 . Wang, Z., Bovik, A.C., Sheikh, H.R., Simoncelli, E.P.,
-
[12]
ISPRS Journal of Photogrammetry and Remote Sensing 231, 288–306
Arsgaussian: 3d gaussian splatting with lidar for aerial remote sensing novel view synthesis. ISPRS Journal of Photogrammetry and Remote Sensing 231, 288–306. Ye,Z.,Li,W.,Liu,S.,Qiao,P.,Dou,Y.,2024. Absgs:Recoveringfinedetailsin3dgaussiansplatting,in:Proceedingsofthe32ndACMinternational conference on multimedia, pp. 1053–1061. Yu, Z., Sattler, T., Geiger, A.,
work page 2024
-
[13]
ACM Transactions on Graphics (ToG) 43, 1–13
Gaussian opacity fields: Efficient adaptive surface reconstruction in unbounded scenes. ACM Transactions on Graphics (ToG) 43, 1–13. Zhang,C.,Zou,Y.,Li,Z.,Yi,M.,Wang,H.,2025a. Transplat:Generalizable3dgaussiansplattingfromsparsemulti-viewimageswithtransformers, in: Proceedings of the AAAI Conference on Artificial Intelligence, pp. 9869–9877. Zhang,K.,Snav...
work page 2019
-
[14]
arXiv preprint arXiv:2309.00277
Sparsesat-nerf: Dense depth supervised neural radiance fields for sparse satellite images. arXiv preprint arXiv:2309.00277 . Page 25 of 26 SatSurfGS: Generalizable 2D Gaussian Splatting for Sparse-View Satellite Surface Reconstruction Zhang, Q., Wysocki, O., Jutzi, B., 2025b. Gs4buildings: Prior-guided gaussian splatting for 3d building reconstruction. ar...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.