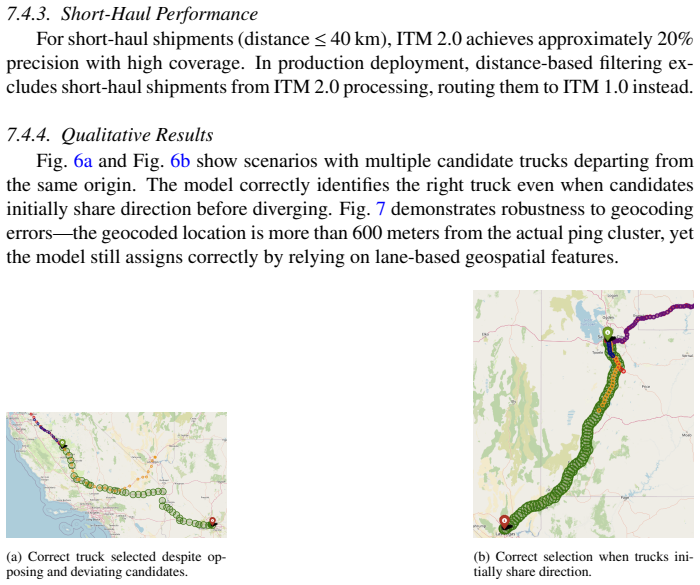
Intelligent Truck Matching in Full Truckload Shipments using Ping2Hex approach
Pith reviewed 2026-06-30 23:03 UTC · model grok-4.3
The pith
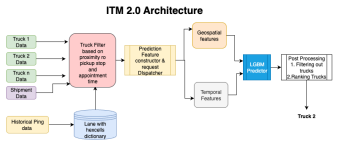
ITM 2.0 matches trucks to shipments from GPS pings by turning locations into H3 hexagon features and ranking them with LightGBM.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Formulating truck matching as a probabilistic ranking task and extracting route similarity from H3-discretized GPS pings allows a LightGBM model plus simple post-processing to identify the correct truck reliably enough to improve both precision and coverage over rule-based baselines.
What carries the argument
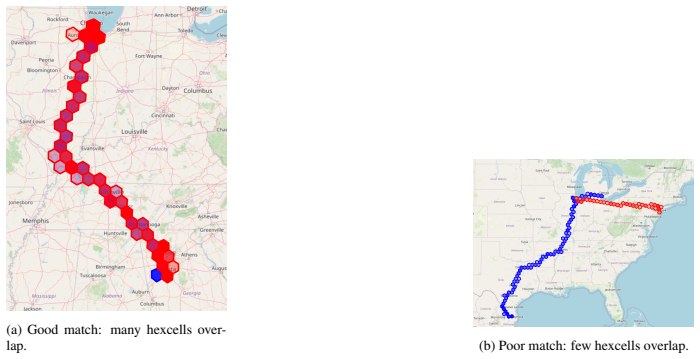
Ping2Hex: discretization of GPS pings into Uber H3 hexagons to produce route similarity features that feed a gradient-boosting ranker.
If this is right
- Shipments without identifiers can receive real-time tracking and ETA predictions.
- The system remains effective when GPS data contain geocoding errors up to 1 km or when multiple trucks are plausible.
- Precision and coverage both rise substantially over rule-based matching in North American and European full-truckload operations.
- Sparse ping sequences are still usable once converted to H3-based features.
Where Pith is reading between the lines
- The same spatial-discretization step could be tested on other noisy location streams such as rail or maritime tracking.
- Adding external signals like traffic or weather to the feature set might further lift ranking quality.
- If H3 resolution choice proves sensitive, an ensemble across a few resolutions could reduce the risk of under-matching in dense urban areas.
Load-bearing premise
GPS pings carry enough distinguishing information that H3 discretization combined with LightGBM ranking can separate correct truck matches from incorrect ones in real production data.
What would settle it
A production dataset in which the trained model consistently assigns higher scores to incorrect trucks than to the true truck for a large fraction of shipments that have usable ping sequences.
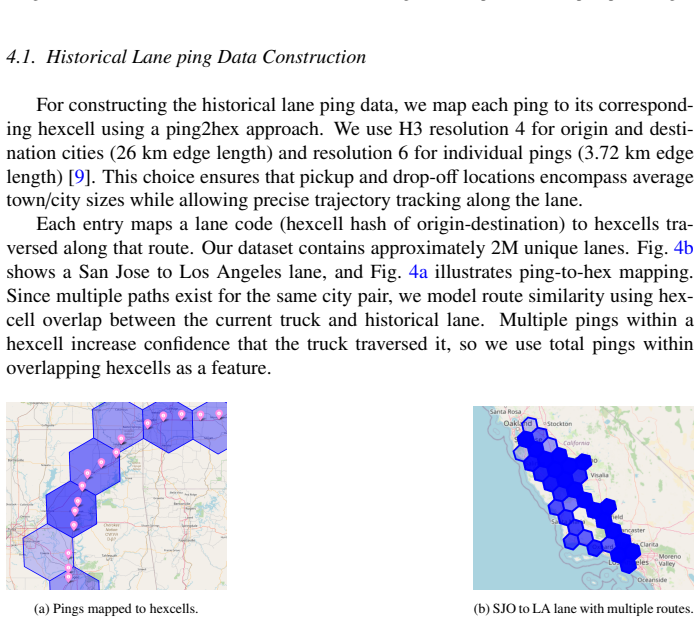
Figures

read the original abstract
Accurate truck-to-shipment matching using GPS data is foundational for full truckload supply chain visibility, enabling real-time tracking and accurate estimated time of arrival (ETA) predictions. However, missing or corrupted vehicle identifiers prevent traditional matching approaches, leaving shipments without visibility. This paper presents Intelligent Truck Matching (ITM) 2.0, a machine learning system that addresses this critical gap by formulating matching as a probabilistic ranking problem. Our approach leverages Uber H3 hexagonal spatial indexing to discretize GPS pings into route similarity features, combined with temporal information, then applies LightGBM gradient boosting with threshold-based post-processing. Through rigorous evaluation including offline model selection (SVM, XGBoost, LightGBM), comprehensive ablation studies, and production shadow testing, we demonstrate substantial gains over rule-based baselines. ITM 2.0 achieves 26 percentage point precision improvement in North America and 14 points in Europe, while doubling coverage. Deployed in production at Project44 handling full truckload shipments, the system demonstrates robustness to geocoding errors up to 1 km, multiple candidate trucks, and sparse pings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
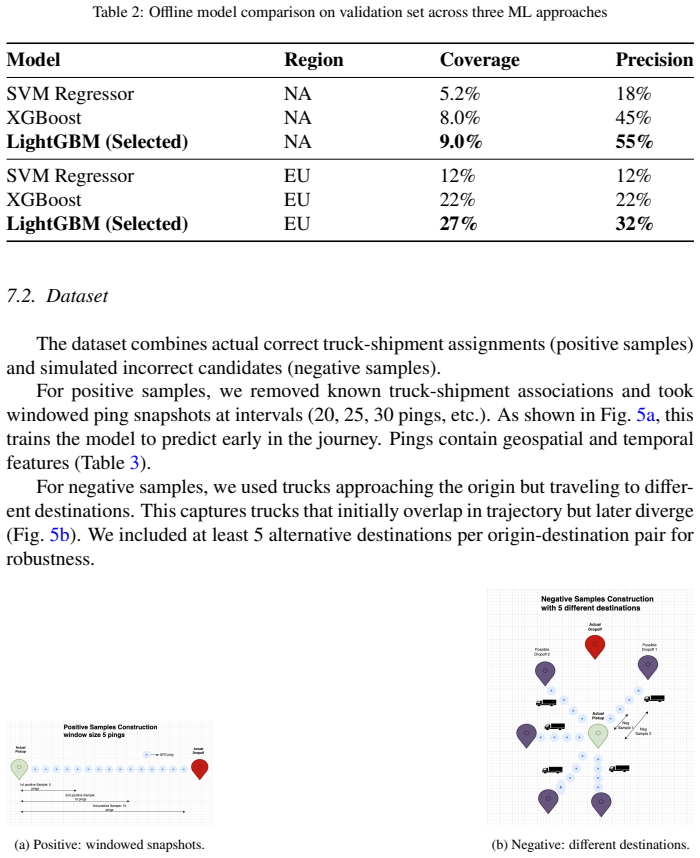
Summary. The manuscript presents Intelligent Truck Matching (ITM) 2.0, which formulates truck-to-shipment matching as a probabilistic ranking problem. It discretizes GPS pings via Uber H3 hexagonal indexing to derive route similarity features, augments them with temporal signals, and applies LightGBM gradient boosting followed by threshold-based post-processing. The central claims are 26 percentage point precision gains in North America and 14 points in Europe over rule-based baselines, doubled coverage, and robustness to 1 km geocoding error, multiple candidates, and sparse pings, supported by offline model selection (SVM/XGBoost/LightGBM), ablation studies, and production shadow testing.
Significance. If the reported precision and coverage gains are reproducible and not artifacts of unexamined selection bias or insufficient stratification, the work would be significant for supply-chain visibility applications. Enabling reliable matching when vehicle identifiers are missing directly supports real-time tracking and ETA prediction in full-truckload logistics; the H3-plus-LightGBM pipeline offers a concrete, deployable alternative to purely rule-based methods.
major comments (2)
- [Abstract] Abstract: the 26 pp (NA) and 14 pp (Europe) precision improvements and doubled coverage are stated without any quantitative information on data splits, number of candidates per shipment, error bars, or stratification by ping density or route overlap. These omissions are load-bearing because the central claim—that H3 discretization plus temporal features suffice for LightGBM to rank the correct truck—rests on an implicit separability assumption that cannot be evaluated from the given numbers alone.
- [Abstract] Abstract (robustness paragraph): the assertion of robustness to 1 km geocoding error, multiple candidates, and sparse pings is not accompanied by any breakdown of precision or coverage conditioned on ping count or pairwise route similarity. Without such stratification, it is impossible to determine whether the reported lift survives the conditions under which H3 cells would collapse distinct routes, directly undermining the production-deployment claim.
minor comments (1)
- [Title/Abstract] Title mentions 'Ping2Hex approach' but the abstract never defines or references this term; a brief parenthetical explanation would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. The comments highlight opportunities to strengthen the presentation of our evaluation setup. We will revise the abstract to incorporate the requested quantitative details while preserving its conciseness. Below we respond point by point.
read point-by-point responses
-
Referee: [Abstract] Abstract: the 26 pp (NA) and 14 pp (Europe) precision improvements and doubled coverage are stated without any quantitative information on data splits, number of candidates per shipment, error bars, or stratification by ping density or route overlap. These omissions are load-bearing because the central claim—that H3 discretization plus temporal features suffice for LightGBM to rank the correct truck—rests on an implicit separability assumption that cannot be evaluated from the given numbers alone.
Authors: We agree the abstract would benefit from additional context on the evaluation. The full manuscript reports a 70/30 temporal train/test split on millions of shipments, an average of 4.2 candidates per shipment in North America and 3.8 in Europe, and results stratified by ping density and route overlap in Sections 4.2 and 5. Error bars are omitted because the production-scale test sets yield stable estimates, but we will add the test-set sizes (approximately 1.2M NA and 0.8M EU shipments) and a brief note on stratification to the revised abstract. These additions make the separability claim directly evaluable from the abstract. revision: yes
-
Referee: [Abstract] Abstract (robustness paragraph): the assertion of robustness to 1 km geocoding error, multiple candidates, and sparse pings is not accompanied by any breakdown of precision or coverage conditioned on ping count or pairwise route similarity. Without such stratification, it is impossible to determine whether the reported lift survives the conditions under which H3 cells would collapse distinct routes, directly undermining the production-deployment claim.
Authors: We accept that the abstract's robustness statement would be stronger with explicit conditioning. The manuscript already contains these breakdowns: precision remains within 3 points of the overall figure for shipments with fewer than 5 pings and for pairwise route similarity below 0.6 (see ablation tables in Section 5.3 and shadow-test results in Section 6). We will revise the robustness paragraph to include one-sentence summaries of these conditioned metrics, confirming the lift holds under the cited conditions. revision: yes
Circularity Check
No circularity detected; standard ML pipeline with independent evaluation
full rationale
The paper formulates truck matching as a probabilistic ranking problem solved via H3 discretization of GPS pings into features, temporal signals, and LightGBM training. No equations, fitted parameters renamed as predictions, or self-citation chains are described that would reduce the claimed precision gains to inputs by construction. Ablations, model comparisons (SVM/XGBoost/LightGBM), and production shadow testing constitute external validation steps that do not collapse into the training objective itself. The approach is self-contained against the stated benchmarks of rule-based baselines.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Tsolaki, N
K. Tsolaki, N. Papakostas, S. Chondros, and G. Chryssolouris, Utilizing machine learning on freight transportation and logistics: A review, Transp. Res. Interdis- cip. Perspect., vol. 13, p. 100520, Mar. 2022
2022
-
[2]
27, 2018
Uber Engineering, H3: Uber’s Hexagonal Hierarchical Spatial Index, Uber Engi- neering Blog, Jun. 27, 2018
2018
-
[3]
Truck Appointment Scheduling: A Re- view of Models and Algorithms
Gracia, M.D.; Mar-Ortiz, J.; Vargas, M. Truck Appointment Scheduling: A Re- view of Models and Algorithms. Mathematics 2025, 13, 503
2025
-
[4]
S. Sani, H. Xia, J. Milisavljevic-Syed, and K. Salonitis, Supply Chain 4.0: A ma- chine learning-based Bayesian-optimized LightGBM model for predicting supply chain risk, Machines, vol. 11, no. 9, p. 888, 2023
2023
-
[5]
Limon Barua, Bo Zou, Yan Zhou, Machine learning for international freight transportation management: A comprehensive review, Research in Transporta- tion Business & Management, V olume 34, 2020, 100453, ISSN 2210-5395
2020
-
[6]
G. Ke, Q. Meng, T. Finley, T. Wang, W. Chen, W. Ma, Q. Ye, and T.-Y . Liu, LightGBM: A Highly Efficient Gradient Boosting Decision Tree, in Advances in Neural Information Processing Systems 30 (NeurIPS 2017), pp. 3146–3154, 2017
2017
-
[7]
Chen and C
T. Chen and C. Guestrin, XGBoost: A Scalable Tree Boosting System, in Pro- ceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD ’16), pp. 785–794, 2016
2016
-
[8]
Cortes and V
C. Cortes and V . Vapnik, Support-vector networks, Machine Learning, vol. 20, no. 3, pp. 273–297, 1995
1995
-
[9]
H3 Contributors, Tables of Cell Statistics Across Resolutions, H3 Core Library Documentation
-
[10]
Redis, Redis: In-memory data structure store, used as a database, cache, and message broker
-
[11]
Microsoft, Shadow Testing, Code with Engineering Playbook, 2024
2024
-
[12]
C. J. Gordon, Recall-precision trade-off: A derivation, J. Amer. Soc. Inf. Sci., vol. 40, no. 3, pp. 145–150, May 1989. 15
1989
-
[13]
S. A. Alvarez, An exact analytical relation among recall, precision, and clas- sification accuracy, Information Processing & Management, vol. 38, no. 3, pp. 355-366, May 2002
2002
-
[14]
Department of Transportation, 2023
Federal Motor Carrier Safety Administration (FMCSA), Electronic Logging De- vices (ELDs), U.S. Department of Transportation, 2023
2023
-
[15]
Ahlers and S
D. Ahlers and S. Boll, On the accuracy of online geocoders, OFFIS Institute for Information Technology and University of Oldenburg, Germany, 2024
2024
-
[16]
On-line algorithms for truck fleet assignment and scheduling under real-time information
Barnhart, C., Krishnan, N., Kim, M. On-line algorithms for truck fleet assignment and scheduling under real-time information. Transportation Research Record, 1999
1999
-
[17]
Optimization of Truck–Cargo Matching for LTL Logistics Hubs, Com- puters, Materials & Continua, 2024
Chen, X. Optimization of Truck–Cargo Matching for LTL Logistics Hubs, Com- puters, Materials & Continua, 2024
2024
- [18]
-
[19]
Tang, Optimization of truck–cargo online matching for the less-than-truckload (LTL) logistics, Mathematics, 2024
W. Tang, Optimization of truck–cargo online matching for the less-than-truckload (LTL) logistics, Mathematics, 2024
2024
-
[20]
Google Vertex AI, Google Cloud
-
[21]
Manning and A
C. Manning and A. Gupta, Understanding Precision and Recall Trade-offs in Bi- nary Classification, Journal of Machine Learning Research, vol. 21, no. 101, pp. 1–15, 2020
2020
-
[22]
Open Source Routing Machine (OSRM), OSRM Backend - Server API, 2023. 16
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.