ChaosNetBench: Benchmarking Spatio-Temporal Graph Neural Networks on Chaotic Lattice Dynamics
Pith reviewed 2026-05-12 04:37 UTC · model grok-4.3
The pith
Spatio-temporal graph neural networks remain effective for forecasting under high local and global chaos while non-graph models lose ground.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ChaosNetBench supplies known chaotic lattice dynamics with independently tunable local chaos K, coupling ε, and size N, enabling direct comparison that reveals a regime transition: non-graph baselines remain competitive only at low local chaos while STGNN architectures prove more resilient once local and global chaos increase.
What carries the argument
Lattice of coupled standard maps with independently tunable local chaos parameter K, coupling strength ε, and system size N that generates controlled spatio-temporal trajectories for benchmarking.
If this is right
- STGNNs should be selected for forecasting tasks that exhibit strong local or global chaos in physical systems.
- Non-graph models suffice when local chaos remains low and coupling is weak.
- Chaos indicators can classify incoming data regimes to route predictions to the appropriate architecture family.
- The reusable testbed allows standardized, reproducible comparisons across many controlled chaos levels instead of single fixed splits.
Where Pith is reading between the lines
- The benchmark could be applied to other families of chaotic partial differential equations to check whether the observed STGNN resilience generalizes beyond map lattices.
- Graph connectivity may be capturing persistent spatial correlations that survive even when local dynamics become highly chaotic.
- Training procedures could incorporate real-time estimates of chaos level to switch or blend graph and non-graph components dynamically.
Load-bearing premise
The lattice of coupled standard maps with tunable K, ε, and N supplies a representative model of the chaotic dynamics encountered in real-world spatio-temporal forecasting tasks.
What would settle it
Demonstrating that STGNNs lose their forecasting advantage over non-graph baselines when the same architectures are tested on an independent chaotic system such as the Kuramoto-Sivashinsky equation or verified high-chaos traffic series.
Figures










read the original abstract
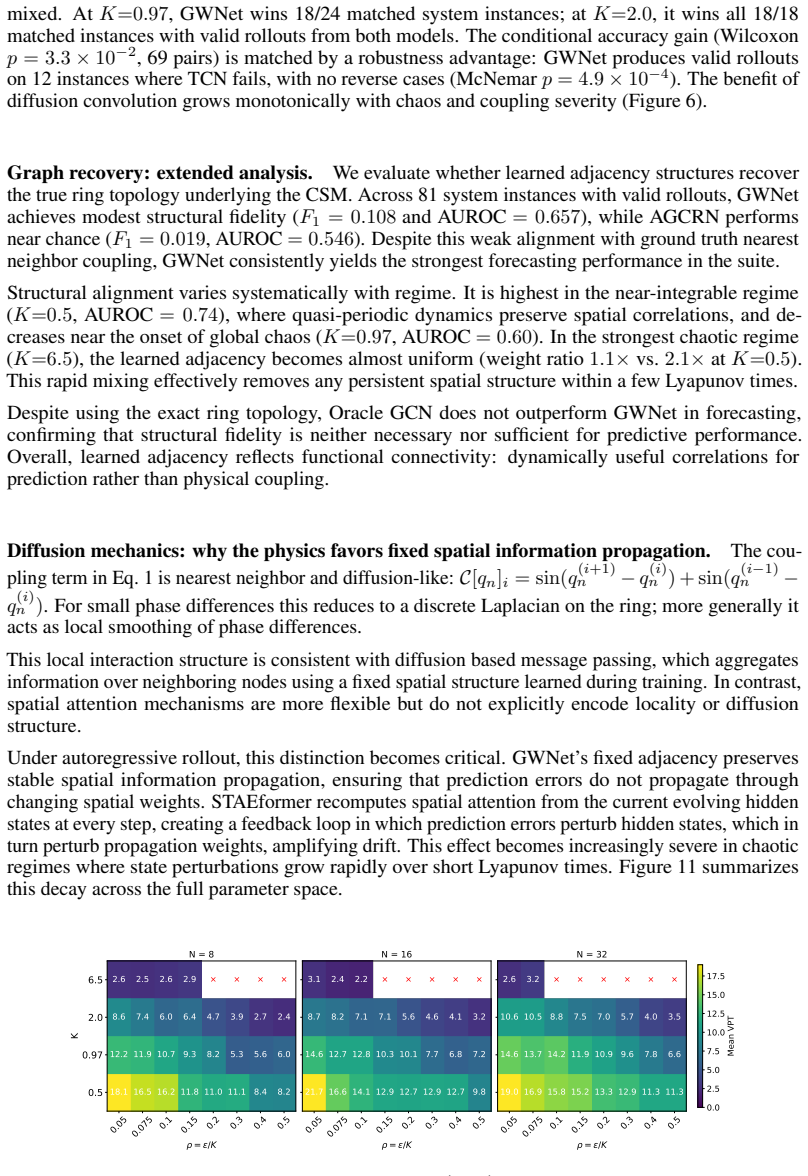
Spatio-temporal graph neural networks (STGNNs) are widely used for short-term forecasting in dynamic physical systems such as traffic and weather. However, the prevailing evaluation practice uses real world benchmark data sets in a single domain with a single fixed holdout splits, making it difficult to compare architectures across different dynamical regimes. We introduce ChaosNetBench (CNB), a synthetic benchmark dataset and evaluation framework for studying STGNN performance under controlled multidimensional chaotic dynamics. CNB is built on a lattice of coupled standard maps with independently tunable local chaos ($K$), coupling strength ($\varepsilon$), and system size ($N$), providing known topology and known dynamics across 96 system instances and 9{,}600 trajectories. We introduce chaos indicators, evaluation metrics and a protocol to analyze and compare the capacity of STGNN architectures to deal with different levels of local and global chaos. We illustrate the usage of the framework by analyzing 13 architectures (5 STGNNs and 8 non-graph baselines). The results reveal a regime dependent transition in which non-graph baselines (TCN, N-BEATS, iTransformer) remain competitive when there is low local chaos, while STGNNs (e.g., Graph WaveNet, D2STGNN, STAEformer) are generally more resilient to higher levels of local and global chaos. CNB provides a practical, reusable testbed for systematically comparing and analyzing the capacity of STGNN architectures to handle different levels of local and global chaos.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces ChaosNetBench (CNB), a synthetic benchmark dataset and evaluation framework built on a lattice of coupled standard maps with independently tunable local chaos parameter K, coupling strength ε, and system size N. It generates 96 system instances and 9,600 trajectories with known topology and dynamics, defines chaos indicators and metrics, and evaluates 13 architectures (5 STGNNs including Graph WaveNet, D2STGNN, STAEformer and 8 non-graph baselines such as TCN, N-BEATS, iTransformer). The central empirical finding is a regime-dependent transition: non-graph baselines remain competitive at low local chaos, while STGNNs are generally more resilient to higher levels of local and global chaos.
Significance. If the empirical transition holds under the stated protocol, the work supplies a controlled, reusable testbed that enables systematic variation of dynamical regimes unavailable in fixed real-world splits. This directly addresses a limitation in current STGNN evaluation practice for physical systems and provides concrete evidence on when graph-based inductive biases confer advantages under increasing chaos. The explicit use of first-principles maps with known Lyapunov structure and the release of 96 instances plus 9,600 trajectories constitute a reproducible resource that can be extended by the community.
major comments (3)
- [§3 (Chaos indicators and evaluation protocol)] The manuscript provides no explicit formulas, pseudocode, or statistical procedure for the introduced chaos indicators that quantify local and global chaos beyond the tunable parameters K and ε. Without these definitions it is impossible to verify the reported regime boundaries or to confirm that the transition is not an artifact of the particular indicator construction.
- [§5 (Experimental results)] The results section reports a regime-dependent transition but supplies neither error bars, confidence intervals, nor the outcome of any statistical test (e.g., paired t-test or Wilcoxon test across the 9,600 trajectories) comparing STGNN versus baseline performance at each (K, ε) regime. This omission prevents assessment of whether the claimed resilience advantage is statistically reliable.
- [§4 (Benchmark construction and protocol)] The evaluation protocol does not specify data-exclusion rules, train/validation/test split ratios, or early-stopping criteria applied uniformly across all 96 system instances. These details are load-bearing for the central claim that STGNNs are “generally more resilient” because small changes in protocol could alter which architectures appear competitive at low versus high chaos.
minor comments (2)
- [Figures 4–7] Table captions and axis labels in the results figures should explicitly state the exact metric (e.g., MAE, RMSE) and the number of random seeds used for each bar or line.
- [Abstract and §3] The abstract states “9,600 trajectories” while the methods text uses “9 600”; consistent formatting and an explicit statement of how many trajectories per system instance would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address each major comment point by point below, indicating the revisions we will make to improve clarity, reproducibility, and statistical rigor.
read point-by-point responses
-
Referee: [§3 (Chaos indicators and evaluation protocol)] The manuscript provides no explicit formulas, pseudocode, or statistical procedure for the introduced chaos indicators that quantify local and global chaos beyond the tunable parameters K and ε. Without these definitions it is impossible to verify the reported regime boundaries or to confirm that the transition is not an artifact of the particular indicator construction.
Authors: We agree that explicit definitions are necessary for full reproducibility and verification. Although Section 3 ties the indicators to the tunable parameters K (local chaos via the standard map's Lyapunov exponent) and ε (global chaos via coupling), the manuscript does not supply the complete mathematical expressions or pseudocode. In the revised manuscript we will add these, including the precise formula for the local chaos indicator (average finite-time Lyapunov exponent across lattice sites) and the global indicator (derived from ε and N), along with pseudocode for their computation from the generated trajectories. This will allow independent verification of the regime boundaries. revision: yes
-
Referee: [§5 (Experimental results)] The results section reports a regime-dependent transition but supplies neither error bars, confidence intervals, nor the outcome of any statistical test (e.g., paired t-test or Wilcoxon test across the 9,600 trajectories) comparing STGNN versus baseline performance at each (K, ε) regime. This omission prevents assessment of whether the claimed resilience advantage is statistically reliable.
Authors: We acknowledge that the lack of uncertainty quantification and formal statistical comparisons weakens the strength of the central claim. The reported results are averages over the 9,600 trajectories, but error bars and tests were omitted. In the revision we will augment Section 5 with standard error bars (or 95% confidence intervals via bootstrapping) for each architecture and regime, plus paired non-parametric tests (Wilcoxon signed-rank) between STGNNs and non-graph baselines at each (K, ε) combination. Updated tables and figures will include these statistics. revision: yes
-
Referee: [§4 (Benchmark construction and protocol)] The evaluation protocol does not specify data-exclusion rules, train/validation/test split ratios, or early-stopping criteria applied uniformly across all 96 system instances. These details are load-bearing for the central claim that STGNNs are “generally more resilient” because small changes in protocol could alter which architectures appear competitive at low versus high chaos.
Authors: We recognize that these procedural details must be stated explicitly to support reproducibility and the robustness of the findings. While Section 4 outlines a uniform protocol across instances, the manuscript does not provide the precise split ratios, exclusion rules, or early-stopping parameters. In the revised version we will expand Section 4 with a dedicated protocol subsection that explicitly states the train/validation/test split ratios, the criteria for excluding unstable trajectories (e.g., those containing NaNs), and the early-stopping rule (applied identically to all models). A summary table of the protocol will also be added. revision: yes
Circularity Check
No significant circularity; benchmark and results are self-contained empirical comparisons
full rationale
The paper defines ChaosNetBench from first-principles using the standard coupled map lattice with explicit tunable parameters K, ε, N, generates trajectories, and reports direct empirical performance of 13 architectures across regimes. No step reduces a claimed result to a fitted parameter renamed as prediction, no self-citation chain supports a load-bearing uniqueness claim, and no ansatz or renaming is smuggled in. The central observation (regime-dependent resilience) is an output of the experiments, not an input by construction. The representativeness concern is a validity question outside circularity analysis.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
CNB is built on a lattice of coupled standard maps with independently tunable local chaos (K), coupling strength (ε), and system size (N), providing known topology and known dynamics across 96 system instances... ring topology with analytically specified adjacency
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Nonlinear dynamics and chaos: with applications to physics, biology, chemistry, and engineering , author=. 2024 , publisher=
work page 2024
-
[2]
Advances in Neural Information Processing Systems , volume=
Chaosbench: A multi-channel, physics-based benchmark for subseasonal-to-seasonal climate prediction , author=. Advances in Neural Information Processing Systems , volume=
-
[3]
Advances in neural information processing systems , volume=
Pdebench: An extensive benchmark for scientific machine learning , author=. Advances in neural information processing systems , volume=
-
[4]
Advances in Neural Information Processing Systems Datasets Track , year=
Synthetic benchmarks for scientific research in explainable machine learning , author=. Advances in Neural Information Processing Systems Datasets Track , year=
- [5]
-
[6]
Physica D: Nonlinear Phenomena , volume=
Anomalous diffusion in single and coupled standard maps with extensive chaotic phase spaces , author=. Physica D: Nonlinear Phenomena , volume=
-
[7]
Henok Tenaw Moges and Deshendran Moodley , title=. Proceedings of the 18th International Conference on Agents and Artificial Intelligence - Volume 3: ICAART , year=
- [8]
-
[9]
Lyapunov Characteristic Exponents for smooth dynamical systems and for
Benettin, Giancarlo and Galgani, Luigi and Giorgilli, Antonio and Strelcyn, Jean-Marie , journal=. Lyapunov Characteristic Exponents for smooth dynamical systems and for
-
[10]
Lyapunov characteristic exponents for smooth dynamical systems and for
Benettin, Giancarlo and Galgani, Luigi and Giorgilli, Antonio and Strelcyn, Jean-Marie , journal=. Lyapunov characteristic exponents for smooth dynamical systems and for
-
[11]
Charalampos Skokos , journal =. The
-
[12]
Charalampos Skokos and Thanos Manos. The S maller ( SALI ) and the G eneralized ( GALI ) A lignment I ndices: E fficient methods of chaos detection. Lecture Notes in Physics. 2016
work page 2016
-
[13]
Dynamical localization in chaotic systems: Spectral statistics and localization measure in the kicked rotator as a paradigm for time-dependent and time-independent systems
-
[14]
Journal of Physics A: Mathematical and General , volume=
Alignment indices: a new, simple method for determining the ordered or chaotic nature of orbits , author=. Journal of Physics A: Mathematical and General , volume=
-
[15]
Advances in Neural Information Processing Systems , volume=
Chaos as an interpretable benchmark for forecasting and data-driven modelling , author=. Advances in Neural Information Processing Systems , volume=
-
[16]
Physical Review Research , volume=
Model scale versus domain knowledge in statistical forecasting of chaotic systems , author=. Physical Review Research , volume=
-
[17]
Physical Review Letters , volume=
Model-free prediction of large spatiotemporally chaotic systems from data: A reservoir computing approach , author=. Physical Review Letters , volume=
-
[18]
Backpropagation algorithms and reservoir computing in recurrent neural networks for the forecasting of complex spatiotemporal dynamics , author=. Neural Networks , volume=
-
[19]
International Conference on Learning Representations (ICLR) , year=
Semi-supervised classification with graph convolutional networks , author=. International Conference on Learning Representations (ICLR) , year=
-
[20]
International conference on machine learning , pages=
Neural relational inference for interacting systems , author=. International conference on machine learning , pages=
-
[21]
Graph WaveNet for Deep Spatial-Temporal Graph Modeling , author=. Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence (IJCAI) , pages=
-
[22]
Advances in Neural Information Processing Systems , volume=
Hamiltonian Neural Networks , author=. Advances in Neural Information Processing Systems , volume=
-
[23]
Advances in neural information processing systems , volume=
Neural ordinary differential equations , author=. Advances in neural information processing systems , volume=
-
[24]
Proceedings of the VLDB Endowment , volume=
Decoupled dynamic spatial-temporal graph neural network for traffic forecasting , author=. Proceedings of the VLDB Endowment , volume=
-
[25]
DDsformer: A double sampling transformer for multivariate time series long-term prediction , author=. Proceedings of the 32nd ACM International Conference on Information and Knowledge Management (CIKM) , pages=
-
[26]
Spatio-Temporal Adaptive Embedding Makes Vanilla Transformer
Liu, Hangchen and Dong, Zheng and Jiang, Renhe and Deng, Jiewen and Deng, Jinliang and Chen, Quanjun and Song, Xuan , booktitle=. Spatio-Temporal Adaptive Embedding Makes Vanilla Transformer
-
[27]
Connecting the dots: Multivariate time series forecasting with graph neural networks , author=. Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining , pages=
-
[28]
proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Temporal convolutional networks for action segmentation and detection , author=. proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[29]
International Conference on Learning Representations (ICLR) , year=
Diffusion Convolutional Recurrent Neural Network: Data-Driven Traffic Forecasting , author=. International Conference on Learning Representations (ICLR) , year=
-
[30]
Proceedings of the National Academy of Sciences , volume=
Discovering governing equations from data by sparse identification of nonlinear dynamical systems , author=. Proceedings of the National Academy of Sciences , volume=
-
[31]
ICLR 2020 Workshop on Deep Differential Equations , year=
Lagrangian Neural Networks , author=. ICLR 2020 Workshop on Deep Differential Equations , year=
work page 2020
-
[32]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Are transformers effective for time series forecasting? , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[33]
Advances in Neural Information Processing Systems (NeurIPS) , volume=
Adaptive Graph Convolutional Recurrent Network for Traffic Forecasting , author=. Advances in Neural Information Processing Systems (NeurIPS) , volume=
-
[34]
Croissant: A Metadata Format for
Akhtar, Mubashara and Benjelloun, Omar and Conforti, Costanza and Gijsbers, Pieter and Gonzalez, Joan and Kuchnik, Michael and Lhoest, Quentin and Marcenac, Pierre and Maskey, Manil and Mattson, Peter and Montoya, Luis Oala and Raut, Amit and Shinde, Swapnil and Simperl, Elena and Thomas, Goeffry and Tykhonov, Slava and Vanschoren, Joaquin and Vogt, Jos a...
-
[35]
Proceedings of the 31st ACM international conference on information & knowledge management , pages=
Spatial-temporal identity: A simple yet effective baseline for multivariate time series forecasting , author=. Proceedings of the 31st ACM international conference on information & knowledge management , pages=
-
[36]
International Conference on Learning Representations (ICLR) , year=
A Time Series is Worth 64 Words: Long-term Forecasting with Transformers , author=. International Conference on Learning Representations (ICLR) , year=
-
[37]
International Conference on Learning Representations (ICLR) , year=
iTransformer: Inverted Transformers Are Effective for Time Series Forecasting , author=. International Conference on Learning Representations (ICLR) , year=
-
[38]
ST-GNNs for Weather Prediction in South Africa , author =. 2022 , booktitle =
work page 2022
-
[39]
ACM Computing Surveys , volume=
A survey on diffusion models for time series and spatio-temporal data , author=. ACM Computing Surveys , volume=
-
[40]
and Carpov, Dmitri and Chapados, Nicolas and Bengio, Yoshua , journal=
Oreshkin, Boris N. and Carpov, Dmitri and Chapados, Nicolas and Bengio, Yoshua , journal=
-
[41]
Long Short-Term Memory , author=. Neural Computation , volume=
-
[42]
Wen, Haomin and Lin, Youfang and Xia, Yutong and Wan, Huaiyu and Wen, Qingsong and Zimmermann, Roger and Liang, Yuxuan , booktitle=
-
[43]
Learning skillful medium-range global weather forecasting , author=. Science , volume=
-
[44]
Proceedings of the 40th International Conference on Machine Learning , pages=
ClimaX: a25 foundation model for weather and climate , author=. Proceedings of the 40th International Conference on Machine Learning , pages=
-
[45]
Accurate medium-range global weather forecasting with 3D neural networks , author =. Nature , volume =
-
[46]
arXiv preprint arXiv:2602.16864 , year=
Position: Why a Dynamical Systems Perspective is Needed to Advance Time Series Modeling , author=. arXiv preprint arXiv:2602.16864 , year=
-
[47]
Nature Reviews Neuroscience , volume=
Reconstructing computational system dynamics from neural data with recurrent neural networks , author=. Nature Reviews Neuroscience , volume=. 2023 , publisher=
work page 2023
-
[48]
ACM Computing Surveys , volume=
Graph deep learning for time series forecasting , author=. ACM Computing Surveys , volume=
-
[49]
Southern African Conference for Artificial Intelligence Research , pages=
Predicting and Discovering Weather Patterns in South Africa Using Spatial-Temporal Graph Neural Networks , author=. Southern African Conference for Artificial Intelligence Research , pages=
-
[50]
Southern African Conference for Artificial Intelligence Research , pages=
Exploring graph neural networks for stock market prediction on the JSE , author=. Southern African Conference for Artificial Intelligence Research , pages=. 2021 , organization=
work page 2021
-
[51]
Advances in Neural Information Processing Systems 35 , pages=
Az-whiteness test: a test for uncorrelated noise on spatio-temporal graphs , author=. Advances in Neural Information Processing Systems 35 , pages=
-
[52]
Advances in Neural Information Processing Systems , volume=
Taming local effects in graph-based spatiotemporal forecasting , author=. Advances in Neural Information Processing Systems , volume=
-
[53]
Proceedings of the AAAI conference on artificial intelligence , volume=
Spatial-temporal synchronous graph convolutional networks: A new framework for spatial-temporal network data forecasting , author=. Proceedings of the AAAI conference on artificial intelligence , volume=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.