Confidence-Gated Robot Autonomy: When Does Uncertainty Actually Help?
Pith reviewed 2026-05-20 10:18 UTC · model grok-4.3
The pith
Above a competence regime, basic uncertainty methods produce similar robot gating to advanced ones while threshold choice dominates outcomes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that predictive uncertainty contributes to robot autonomy chiefly by ranking instances likely to produce errors. In threshold-gated systems, once a base model surpasses a dataset-specific competence regime, softmax heuristics, MC Dropout, and ensembles produce similar gating behavior according to Spearman rank correlation and act/defer agreement measures. Threshold choice exerts a larger effect on realized outcomes such as collision rate and task cost in embodied simulation. Under temporal covariate shift, ranking quality remains stable while fine-grained semantic out-of-distribution detection performs near chance.
What carries the argument
Threshold-gated autonomy that uses uncertainty estimates to rank likely errors and decide act versus defer, evaluated via rank correlation and decision agreement.
If this is right
- Above the competence regime, softmax uncertainty produces gating decisions equivalent to those from MC Dropout and ensembles.
- Threshold choice impacts execution outcomes such as collision rate and cost more than the uncertainty estimation method.
- Error ranking quality stays stable under temporal covariate shift.
- Fine-grained semantic out-of-distribution detection remains near chance performance under the same shifts.
Where Pith is reading between the lines
- Designers could simplify uncertainty pipelines to basic proxies once a model reaches the competence regime on a given task.
- Separate methods beyond standard uncertainty may be needed for reliable semantic novelty detection in changing environments.
- Deployments should first verify that the base model has entered the competence regime before depending on uncertainty for gating.
- Similar competence-dependent patterns could appear in other selective-prediction settings such as autonomous driving or medical decision support.
Load-bearing premise
The three temporal activity-recognition benchmarks and the embodied simulation capture the error distributions and decision consequences typical of real robotic autonomy deployments.
What would settle it
A new robotic task or real-world deployment in which, above the competence regime, softmax and ensemble methods produce markedly different act/defer decisions or in which threshold variation shows little effect on collision rates.
Figures


read the original abstract
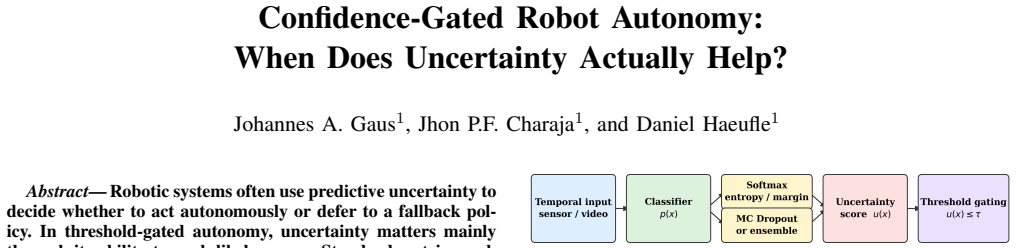
Robotic systems often use predictive uncertainty to decide whether to act autonomously or defer to a fallback policy. In threshold-gated autonomy, uncertainty matters mainly through its ability to rank likely errors. Standard metrics such as expected calibration error and AUROC do not directly test whether uncertainty changes act/defer decisions. We therefore evaluate uncertainty using Spearman rank correlation, paired bootstrap equivalence testing, and act/defer agreement. Across three temporal activity-recognition benchmarks, we find a dataset-dependent competence regime below which uncertainty provides a weak and unstable error ranking. Above this regime, softmax heuristics, MC Dropout, and ensembles produce similar gating behavior, while threshold choice has a much larger effect on execution outcomes. A multi-seed embodied simulation shows the same pattern for collision rate and cost once realized autonomy is matched. Under temporal covariate shift, ranking quality remains stable, but fine grained semantic OOD detection remains near chance. These results suggest that simple uncertainty proxies can suffice for selective gating once the base model is competent, but not for semantic novelty detection.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript evaluates predictive uncertainty for threshold-gated robot autonomy using Spearman rank correlation, paired bootstrap equivalence testing, and act/defer agreement. Across three temporal activity-recognition benchmarks and a multi-seed embodied simulation, it reports a dataset-dependent competence regime below which uncertainty provides weak error ranking; above this regime, softmax heuristics, MC Dropout, and ensembles yield similar gating behavior while threshold choice dominates execution outcomes. Ranking quality remains stable under temporal covariate shift, but fine-grained semantic OOD detection stays near chance. The work concludes that simple uncertainty proxies suffice for selective gating once the base model is competent.
Significance. If the empirical patterns hold, the results indicate that once a model reaches sufficient competence, elaborate uncertainty estimation may not be necessary for gating decisions, as threshold selection exerts greater influence and method equivalence emerges. The use of equivalence testing alongside rank correlation and the multi-seed simulation provide a stronger basis for claiming robustness than standard calibration or AUROC metrics alone. This could guide practical choices in robotic systems, though the transfer to continuous, safety-critical domains remains an open question.
major comments (1)
- [Abstract] Abstract and benchmarks description: The central claim that results 'suggest that simple uncertainty proxies can suffice for selective gating' in robot autonomy rests on the three temporal activity-recognition benchmarks being representative of error distributions and decision consequences. These benchmarks involve discrete classification with uniform costs, whereas real autonomy typically features continuous state-action spaces, physical constraints, and asymmetric costs (e.g., collision vs. false deferral). This mismatch is load-bearing for the suggested implications beyond the specific datasets.
minor comments (2)
- [Methods] Methods section: It is unclear whether the competence regime thresholds and data splits were pre-specified or selected post-hoc; explicit statement on this would strengthen the interpretation of dataset-dependent findings.
- [Methods] Notation: The definition and selection procedure for the act/defer threshold should be stated more explicitly to allow replication of the equivalence tests.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comment on benchmark scope and implications below, and have revised the manuscript to better qualify the claims.
read point-by-point responses
-
Referee: [Abstract] Abstract and benchmarks description: The central claim that results 'suggest that simple uncertainty proxies can suffice for selective gating' in robot autonomy rests on the three temporal activity-recognition benchmarks being representative of error distributions and decision consequences. These benchmarks involve discrete classification with uniform costs, whereas real autonomy typically features continuous state-action spaces, physical constraints, and asymmetric costs (e.g., collision vs. false deferral). This mismatch is load-bearing for the suggested implications beyond the specific datasets.
Authors: We agree that the three temporal activity-recognition benchmarks consist of discrete classification tasks with uniform costs and therefore do not directly replicate continuous state-action spaces or asymmetric cost structures typical of many robotic autonomy scenarios. The multi-seed embodied simulation component does evaluate collision rates and aggregate costs under physical constraints once realized autonomy levels are matched, providing a partial bridge to more realistic decision consequences. To address the concern that this mismatch is load-bearing for broader implications, we have revised the abstract to explicitly limit the scope of the conclusions to the evaluated settings and to note that extension to continuous, safety-critical domains requires further study. This change clarifies rather than overstates the results. revision: yes
Circularity Check
No circularity: empirical evaluation on external benchmarks
full rationale
The paper is a purely empirical study that applies standard metrics (Spearman rank correlation, paired bootstrap equivalence testing, act/defer agreement) to three temporal activity-recognition benchmarks and one embodied simulation. All reported findings are dataset-dependent outcomes derived from direct comparison against held-out data and external error distributions. No equations, derivations, or central claims reduce to fitted parameters by construction, self-citations, or ansatzes imported from prior author work. The analysis remains self-contained against the chosen benchmarks without any load-bearing step that collapses into its own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- act/defer threshold
axioms (1)
- domain assumption The three temporal activity-recognition benchmarks are representative of robotic decision scenarios
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We therefore evaluate uncertainty using Spearman rank correlation, paired bootstrap equivalence testing, and act/defer agreement. Across three temporal activity-recognition benchmarks, we find a dataset-dependent competence regime below which uncertainty provides a weak and unstable error ranking.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Event-triggered robot self- assessment to aid in autonomy adjustment,
N. Conlon, N. Ahmed, and D. Szafir, “Event-triggered robot self- assessment to aid in autonomy adjustment,”Frontiers in Robotics and AI, vol. 10, 2024
work page 2024
-
[2]
Selective classification for deep neural networks,
Y . Geifman and R. El-Yaniv, “Selective classification for deep neural networks,” inNeurIPS, ser. NIPS’17. Red Hook, NY , USA: Curran Associates Inc., 2017, p. 4885–4894
work page 2017
-
[3]
On optimum recognition error and reject tradeoff,
C. Chow, “On optimum recognition error and reject tradeoff,”IEEE Transactions on Information Theory, vol. 16, no. 1, pp. 41–46, 1970
work page 1970
-
[4]
Dropout as a Bayesian approximation: Representing model uncertainty in deep learning,
Y . Gal and Z. Ghahramani, “Dropout as a Bayesian approximation: Representing model uncertainty in deep learning,” inICML, 2016
work page 2016
-
[5]
Simple and scalable predictive uncertainty estimation using deep ensembles,
B. Lakshminarayanan, A. Pritzel, and C. Blundell, “Simple and scalable predictive uncertainty estimation using deep ensembles,” in NeurIPS, ser. NIPS’17. Red Hook, NY , USA: Curran Associates Inc., 2017, p. 6405–6416
work page 2017
-
[6]
Can you trust your model’s uncertainty? evaluating predictive uncertainty under dataset shift,
Y . Ovadiaet al., “Can you trust your model’s uncertainty? evaluating predictive uncertainty under dataset shift,” inAdvances in Neural Information Processing Systems, 2019
work page 2019
-
[7]
Y . Dinget al., “Revisiting the evaluation of uncertainty estimation and its application to explore model complexity-uncertainty trade-off,” in 2020 CVPRW, 2020, pp. 22–31
work page 2020
-
[8]
Uncertainty-aware self-supervised learning of spatial perception tasks,
M. Navaet al., “Uncertainty-aware self-supervised learning of spatial perception tasks,”IEEE RA-L, vol. 6, no. 4, pp. 6693–6700, 2021
work page 2021
-
[9]
Shared autonomy via hindsight optimization for teleoperation and teaming,
S. Javdaniet al., “Shared autonomy via hindsight optimization for teleoperation and teaming,”IJRR, vol. 37, no. 7, pp. 717–742, 2018
work page 2018
-
[10]
Sari: Shared autonomy across repeated interaction,
A. Jonnavittula, S. A. Mehta, and D. P. Losey, “Sari: Shared autonomy across repeated interaction,”J. Hum.-Robot Interact., vol. 13, no. 2, Jun. 2024
work page 2024
-
[11]
Risk-aware trajectory optimization and control for an underwater suspended robotic system,
Y . Origaneet al., “Risk-aware trajectory optimization and control for an underwater suspended robotic system,”IF AC-PapersOnLine, vol. 59, no. 22, pp. 348–353, 2025, 16th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles CAMS 2025
work page 2025
-
[12]
Task-driven detection of distribution shifts with sta- tistical guarantees for robot learning,
A. Faridet al., “Task-driven detection of distribution shifts with sta- tistical guarantees for robot learning,”IEEE Transactions on Robotics, vol. 41, pp. 926–945, 2025
work page 2025
-
[13]
Selectivenet: A deep neural network with an integrated reject option,
Y . Geifman and R. El-Yaniv, “Selectivenet: A deep neural network with an integrated reject option,” inICML, 2019
work page 2019
-
[14]
C. Cortes, G. DeSalvo, and M. Mohri, “Learning with rejection,” in Algorithmic Learning Theory, R. Ortner, H. U. Simon, and S. Zilles, Eds. Cham: Springer International Publishing, 2016, pp. 67–82
work page 2016
-
[15]
Overcoming common flaws in the evaluation of selective classification systems,
J. Traubet al., “Overcoming common flaws in the evaluation of selective classification systems,” inAdvances in Neural Information Processing Systems, A. Globersonet al., Eds., vol. 37. Curran Associates, Inc., 2024, pp. 2323–2347
work page 2024
-
[16]
Safe planning in dynamic environments using conformal prediction,
L. Lindemannet al., “Safe planning in dynamic environments using conformal prediction,”IEEE RA-L, vol. 8, no. 8, pp. 5116–5123, 2023
work page 2023
-
[17]
Risk-Calibrated Human-Robot Interaction via Set- Valued Intent Prediction,
J. Lidardet al., “Risk-Calibrated Human-Robot Interaction via Set- Valued Intent Prediction,” inProceedings of Robotics: Science and Systems, Delft, Netherlands, July 2024
work page 2024
-
[18]
Aleatory or epistemic? does it matter?
A. D. Kiureghian and O. Ditlevsen, “Aleatory or epistemic? does it matter?”Structural Safety, vol. 31, no. 2, pp. 105–112, 2009, risk Acceptance and Risk Communication
work page 2009
-
[19]
What uncertainties do we need in bayesian deep learning for computer vision?
A. Kendall and Y . Gal, “What uncertainties do we need in bayesian deep learning for computer vision?” inNeurIPS, ser. NIPS’17. Red Hook, NY , USA: Curran Associates Inc., 2017, p. 5580–5590
work page 2017
-
[20]
Decomposition of uncertainty in Bayesian deep learning for efficient and risk-sensitive learning,
S. Depeweget al., “Decomposition of uncertainty in Bayesian deep learning for efficient and risk-sensitive learning,” ser. PMLR, J. Dy and A. Krause, Eds., vol. 80. PMLR, 10–15 Jul 2018, pp. 1184–1193
work page 2018
-
[21]
Equivalence tests: A practical primer for t tests, cor- relations, and meta-analyses,
D. Lakens, “Equivalence tests: A practical primer for t tests, cor- relations, and meta-analyses,”Social Psychological and Personality Science, vol. 8, no. 4, pp. 355–362, May 2017
work page 2017
-
[22]
A Baseline for Detecting Misclassified and Out-of-Distribution Examples in Neural Networks
D. Hendrycks and K. Gimpel, “A baseline for detecting misclassified and out-of-distribution examples in neural networks,”ArXiv, vol. abs/1610.02136, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.