YOLO26 vs. YOLOv8: A Comprehensive Architectural Benchmark of Next-Generation Real-Time Object Detection Models
Pith reviewed 2026-06-30 12:16 UTC · model grok-4.3
The pith
YOLO26 achieves higher accuracy with lower compute than YOLOv8 on Pascal VOC but the advantage shrinks on VisDrone and GPU latency favors YOLOv8.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
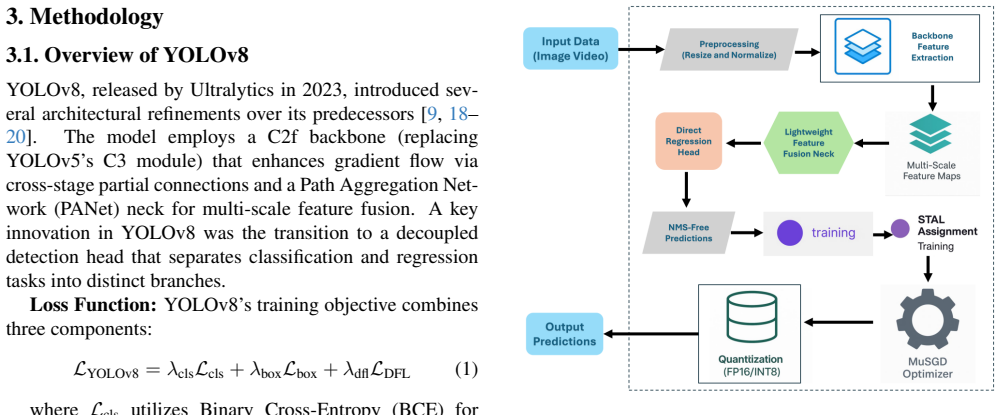
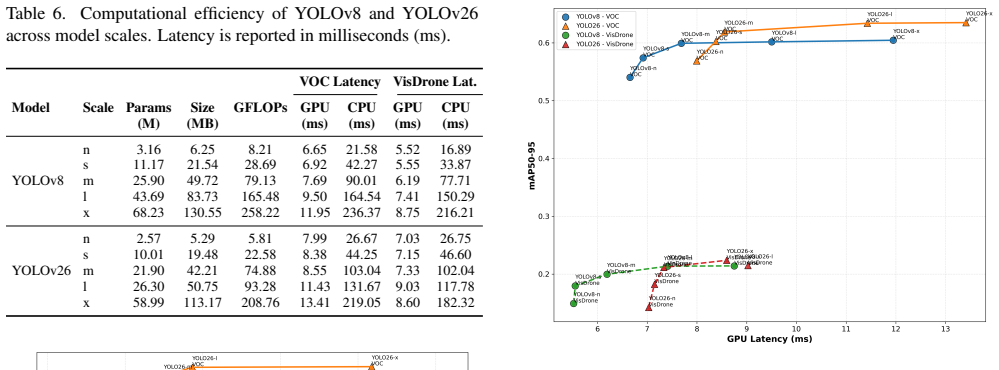
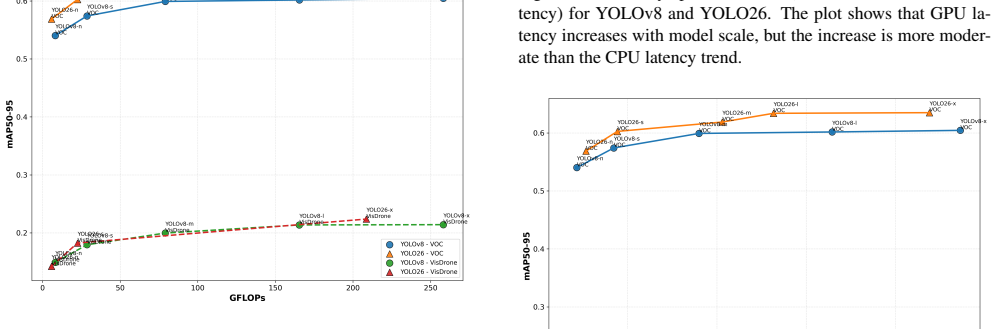
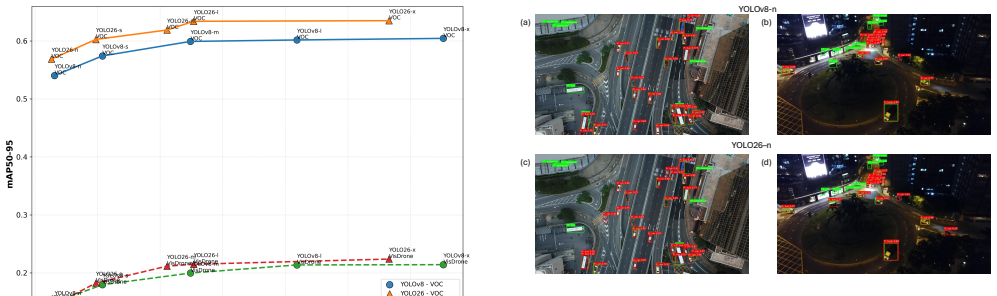
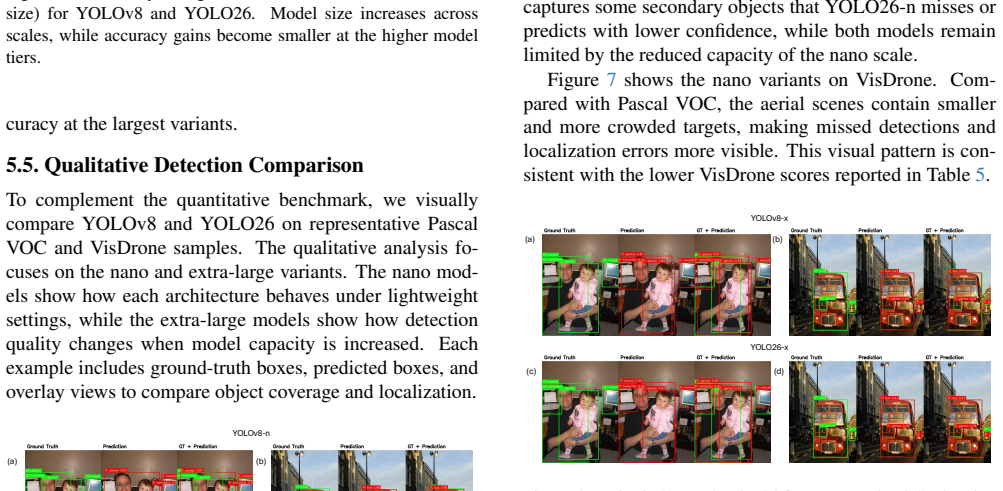
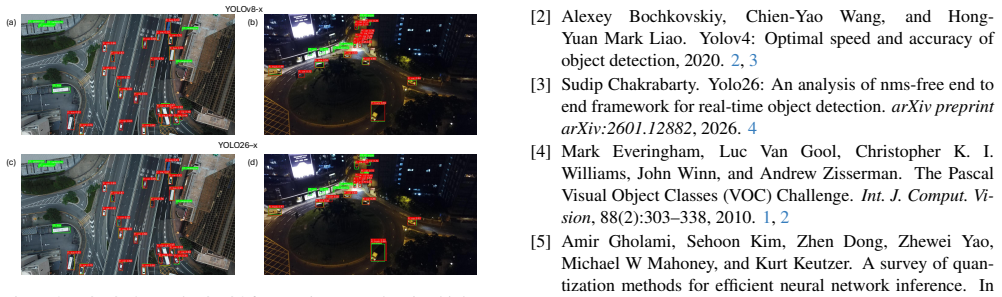
YOLO26 with its native end-to-end one-to-one label assignment, removal of Distribution Focal Loss, and spectral-constrained CSP-Muon backbone produces a lower computational footprint and higher accuracy than YOLOv8 on Pascal VOC, reaching 0.635 mAP_50:95 for the largest variant, yet the same design yields only a 0.010 mAP_50:95 advantage on VisDrone while increasing GPU latency across all model sizes.
What carries the argument
The native end-to-end one-to-one label assignment that replaces non-maximum suppression and Distribution Focal Loss, allowing direct prediction-to-ground-truth matching without post-processing.
If this is right
- Architecture selection for real-time detection must consider object density and typical object size in the target domain.
- NMS-free designs do not automatically produce lower GPU inference latency even when they reduce overall compute.
- The CSP-Muon backbone and one-to-one assignment deliver their clearest benefits on datasets with larger, less crowded objects.
- Hardware benchmarks on both CPU and GPU are required to decide deployment suitability rather than relying on model size alone.
Where Pith is reading between the lines
- Dense small-object regimes may need additional mechanisms beyond current NMS-free label assignment to close the performance gap.
- Extending the same protocol to additional hardware platforms would clarify whether the GPU latency penalty is universal.
- A follow-up study that isolates each component (backbone, loss removal, label assignment) would show which change drives the observed trade-offs.
Load-bearing premise
The two model families were trained and tuned under sufficiently similar conditions that measured differences can be attributed to the architectural changes rather than hidden differences in data or optimization.
What would settle it
Retraining both families from identical starting weights using the exact same training pipeline, augmentations, and hyperparameters, then re-measuring whether the accuracy and latency gaps remain.
Figures

read the original abstract
This paper presents a rigorous empirical evaluation of Ultralytics YOLO26 against the YOLOv8 baseline, offering an independent real-world stress test of NMS-free architectures on non-COCO distributions. Engineered for edge deployment, YOLO26 introduces native end-to-end one-to-one label assignment, the removal of Distribution Focal Loss (DFL), and a spectral-constrained CSP-Muon backbone. We conducted a comprehensive, cross-scale comparative analysis across five model capacities, using the general object detection (Pascal VOC) and dense aerial small-object detection (VisDrone) datasets. Models are evaluated across accuracy (mAP_50 and mAP_50:95), model complexity, and hardware-specific CPU/GPU latency. Our findings revealed that while YOLO26 achieves a lower computational footprint and superior accuracy on Pascal VOC, with YOLO26-x reaching 0.635 mAP_50:95, this advantage narrows in dense aerial environments. On VisDrone, where over 75% of objects are under 2,000 pixels, both architectures struggle significantly, yielding a minimal performance gap (0.214 mAP_50:95 for YOLOv8-x vs. 0.224 mAP_50:95 for YOLO26-x). Crucially, hardware benchmarking demonstrates that YOLOv8 maintains a consistent edge in GPU inference latency across identical scales (e.g., 6.92 ms for YOLOv8-s vs. 8.38 ms for YOLO26-s), showing that NMS-free design does not inherently guarantee superiority in universal deployment. This work maps the operational boundaries of NMS-free frameworks to guide architecture selection based on dataset density, object scale, and hardware constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to deliver a rigorous empirical benchmark of YOLO26 (featuring native end-to-end one-to-one assignment, DFL removal, and spectral-constrained CSP-Muon backbone) versus YOLOv8 across five scales on Pascal VOC and VisDrone. It reports YOLO26 advantages in computational footprint and accuracy on Pascal VOC (YOLO26-x at 0.635 mAP_50:95), a narrowed gap on VisDrone (0.224 vs. 0.214 mAP_50:95), and consistently lower GPU latency for YOLOv8 (e.g., 6.92 ms vs. 8.38 ms for the small variants), concluding that NMS-free designs do not guarantee universal superiority.
Significance. If training and evaluation conditions are verifiably matched, the work would provide useful guidance on when NMS-free architectures are preferable for general versus dense small-object detection and for CPU/GPU edge constraints, extending beyond standard COCO benchmarks.
major comments (1)
- [Abstract] Abstract: the central attribution of mAP and latency deltas to the listed architectural changes (end-to-end assignment, DFL removal, CSP-Muon backbone) is load-bearing yet unsupported. No training protocol, data splits, augmentation policy, hyperparameter schedule, or optimizer settings are stated for either family, so observed differences cannot be isolated from possible differences in training regime.
Simulated Author's Rebuttal
We thank the referee for highlighting this important methodological gap. We address the comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central attribution of mAP and latency deltas to the listed architectural changes (end-to-end assignment, DFL removal, CSP-Muon backbone) is load-bearing yet unsupported. No training protocol, data splits, augmentation policy, hyperparameter schedule, or optimizer settings are stated for either family, so observed differences cannot be isolated from possible differences in training regime.
Authors: We agree that the absence of training and evaluation protocol details prevents readers from confidently attributing performance differences to the architectural modifications. In the revised manuscript we will insert a dedicated Experimental Setup section that specifies the exact training protocol, data splits, augmentation policy, hyperparameter schedule, and optimizer settings used for both YOLO26 and YOLOv8 families. This addition will make the comparison conditions explicit and allow the attribution claims to be properly evaluated. revision: yes
Circularity Check
No circularity: pure empirical benchmark with no derivations or self-referential predictions
full rationale
The paper performs a direct empirical comparison of two model families on public external datasets (Pascal VOC, VisDrone) using standard metrics (mAP, latency). No mathematical derivations, first-principles predictions, fitted parameters renamed as outputs, or load-bearing self-citations appear in the abstract or described content. The central claims rest on observed performance deltas under the assumption of comparable training regimes, but this is an empirical fairness issue rather than circularity. No equations, ansatzes, or uniqueness theorems are invoked that reduce to the paper's own inputs. This matches the default expectation of a non-circular empirical study.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Real- time object detection in computer vision for quality control in industries
Zahid Ahmed, S Varalakshmi, and Karishma Desai. Real- time object detection in computer vision for quality control in industries. In2024 International Conference on Advances in Computing Research on Science Engineering and Tech- nology (ACROSET), pages 1–7. IEEE, 2024. 1
2024
-
[2]
Yolov4: Optimal speed and accuracy of object detection, 2020
Alexey Bochkovskiy, Chien-Yao Wang, and Hong- Yuan Mark Liao. Yolov4: Optimal speed and accuracy of object detection, 2020. 2, 3
2020
-
[3]
Sudip Chakrabarty. Yolo26: An analysis of nms-free end to end framework for real-time object detection.arXiv preprint arXiv:2601.12882, 2026. 4
-
[4]
Mark Everingham, Luc Van Gool, Christopher K. I. Williams, John Winn, and Andrew Zisserman. The Pascal Visual Object Classes (VOC) Challenge.Int. J. Comput. Vi- sion, 88(2):303–338, 2010. 1, 2
2010
-
[5]
A survey of quan- tization methods for efficient neural network inference
Amir Gholami, Sehoon Kim, Zhen Dong, Zhewei Yao, Michael W Mahoney, and Kurt Keutzer. A survey of quan- tization methods for efficient neural network inference. In Low-power computer vision, pages 291–326. Chapman and Hall/CRC, 2022. 3
2022
-
[6]
Learning non-maximum suppression
Jan Hosang, Rodrigo Benenson, and Bernt Schiele. Learning non-maximum suppression. InProceedings of the IEEE con- ference on computer vision and pattern recognition, pages 4507–4515, 2017. 1
2017
-
[7]
Mff-yolov8: Small object detection based on multi-scale feature fusion for uav remote sensing images
Kun Hu, Jinzheng Lu, Chaoquan Zheng, Qiang Xiang, and Ling Miao. Mff-yolov8: Small object detection based on multi-scale feature fusion for uav remote sensing images. IET Image Processing, 19(1):e70066, 2025. 2
2025
-
[8]
Computer vision for autonomous vehicles: Prob- lems, datasets and state of the art.Foundations and Trends in Computer Graphics and Vision, 12(1-3):1–308, 2020
Joel Janai, Fatma G ¨uney, Aseem Behl, and Andreas Geiger. Computer vision for autonomous vehicles: Prob- lems, datasets and state of the art.Foundations and Trends in Computer Graphics and Vision, 12(1-3):1–308, 2020. 1
2020
-
[9]
Ultralytics yolov5, 2020
Glenn Jocher. Ultralytics yolov5, 2020. 3, 4
2020
-
[10]
Ultralytics yolo11, 2024
Glenn Jocher and Jing Qiu. Ultralytics yolo11, 2024. 1, 2, 3
2024
-
[11]
Ultralytics yolo26, 2026
Glenn Jocher and Jing Qiu. Ultralytics yolo26, 2026. 1, 3
2026
-
[12]
Ultralytics yolov8, 2023
Glenn Jocher, Ayush Chaurasia, and Jing Qiu. Ultralytics yolov8, 2023. 1, 2, 3
2023
-
[13]
Muon: An optimizer for hidden layers in neural networks, 2024
Keller Jordan, Yuchen Jin, Vlado Boza, You Jiacheng, Franz Cesista, Laker Newhouse, and Jeremy Bernstein. Muon: An optimizer for hidden layers in neural networks, 2024. 1
2024
-
[14]
Mengqi Lei, Siqi Li, Yihong Wu, and et al. Yolov13: Real- time object detection with hypergraph-enhanced adaptive vi- sual perception.arXiv preprint arXiv:2506.17733, 2025. 2, 3
-
[15]
Microsoft coco: Common objects in context
Tsung-Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Doll´ar, and C Lawrence Zitnick. Microsoft coco: Common objects in context. In European conference on computer vision, pages 740–755. Springer, 2014. 1, 2
2014
-
[16]
Rt-detrv2: Improved baseline with bag-of-freebies for real-time detection transformer, 2024
Wenyu Lv, Yian Zhao, Qinyao Chang, Kui Huang, Guanzhong Wang, and Yi Liu. Rt-detrv2: Improved base- line with bag-of-freebies for real-time detection transformer. arXiv preprint arXiv:2407.17140, 2024. 1, 3
-
[17]
Yolo v3: Visual and real-time object detection model for smart surveillance systems (3s)
Kanyifeechukwu Jane Oguine, Ozioma Collins Oguine, and Hashim Ibrahim Bisallah. Yolo v3: Visual and real-time object detection model for smart surveillance systems (3s). In2022 5th International Conference on Information Tech- nology for Education and Development (ITED), pages 1–8. IEEE, 2022. 2
2022
-
[18]
Yolo9000: better, faster, stronger
Joseph Redmon and Ali Farhadi. Yolo9000: better, faster, stronger. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 7263–7271, 2017. 3, 4
2017
-
[19]
YOLOv3: An Incremental Improvement
Joseph Redmon and Ali Farhadi. Yolov3: An incremental improvement.arXiv preprint arXiv:1804.02767, 2018. 3
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[20]
You only look once: Unified, real-time object de- tection
Joseph Redmon, Santosh Divvala, Ross Girshick, and Ali Farhadi. You only look once: Unified, real-time object de- tection. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 779–788, 2016. 1, 2, 3, 4
2016
-
[21]
Yolo26: key architectural enhancements and performance benchmarking for real-time object detection,
Ranjan Sapkota, Rahul Harsha Cheppally, Ajay Sharda, and Manoj Karkee. Yolo26: key architectural enhancements and performance benchmarking for real-time object detection. arXiv preprint arXiv:2509.25164, 2025. 2, 3
-
[22]
YOLOv26: An Object Detector Built for Real-Time Deployment.LearnOpenCV – Learn OpenCV , PyTorch, Keras, Tensorflow with code, & tutorials, 2026
Bhomik Sharma. YOLOv26: An Object Detector Built for Real-Time Deployment.LearnOpenCV – Learn OpenCV , PyTorch, Keras, Tensorflow with code, & tutorials, 2026. 4
2026
-
[23]
Quantizing YOLO v8 models.Medium,
Sulav Shrestha. Quantizing YOLO v8 models.Medium,
-
[24]
Dbyolov8: Dual- branch yolov8 network for small object detection on drone image.International Journal of Advanced Computer Science & Applications, 16(1), 2025
Yawei Tan, Bingxin Xu, Jiangsheng Sun, Cheng Xu, Weiguo Pan, Songyin Dai, and Hongzhe Liu. Dbyolov8: Dual- branch yolov8 network for small object detection on drone image.International Journal of Advanced Computer Science & Applications, 16(1), 2025. 2
2025
-
[25]
A comprehensive review of yolo architectures in computer vision: From yolov1 to yolov8 and yolo-nas.Machine learning and knowledge ex- traction, 5(4):1680–1716, 2023
Juan Terven, Diana-Margarita C ´ordova-Esparza, and Julio- Alejandro Romero-Gonz ´alez. A comprehensive review of yolo architectures in computer vision: From yolov1 to yolov8 and yolo-nas.Machine learning and knowledge ex- traction, 5(4):1680–1716, 2023. 2
2023
-
[26]
YOLOv12: Attention-Centric Real-Time Object Detectors
Yunjie Tian, Qixiang Ye, and David Doermann. Yolo12: Attention-centric real-time object detectors.arXiv preprint arXiv:2502.12524, 2025. 3
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[27]
Rethinking PASCAL-VOC and MS-COCO dataset for small object detection.Journal of Vi- sual Communication and Image Representation, 93:103830,
Kang Tong and Yiquan Wu. Rethinking PASCAL-VOC and MS-COCO dataset for small object detection.Journal of Vi- sual Communication and Image Representation, 93:103830,
-
[28]
Yolov10: Real-time end-to- end object detection.Advances in neural information pro- cessing systems, 37:107984–108011, 2024
Ao Wang, Hui Chen, Lihao Liu, Kai Chen, Zijia Lin, Jun- gong Han, and Guiguang Ding. Yolov10: Real-time end-to- end object detection.Advances in neural information pro- cessing systems, 37:107984–108011, 2024. 1, 2, 3
2024
-
[29]
Yolov9: Learning what you want to learn using programmable gra- dient information
Chien-Yao Wang and Hong-Yuan Mark Liao. Yolov9: Learning what you want to learn using programmable gra- dient information. 2024. 3
2024
-
[30]
Q-petr: Quant-aware position embedding transformation for multi-view 3d object detection.arXiv e-prints, pages arXiv–2502, 2025
Jiangyong Yu, Changyong Shu, Dawei Yang, Sifan Zhou, Zichen Yu, Xing Hu, and Yan Chen. Q-petr: Quant-aware position embedding transformation for multi-view 3d object detection.arXiv e-prints, pages arXiv–2502, 2025. 3
2025
-
[31]
An im- proved yolov5 real-time detection method for small objects captured by uav.Soft Computing, 26(1):361–373, 2022
Wei Zhan, Chenfan Sun, Maocai Wang, Jinhui She, Yangyang Zhang, Zhiliang Zhang, and Yong Sun. An im- proved yolov5 real-time detection method for small objects captured by uav.Soft Computing, 26(1):361–373, 2022. 1, 2
2022
-
[32]
Detection and tracking meet drones challenge.IEEE Transactions on Pattern Anal- ysis and Machine Intelligence, 44(11):7380–7399, 2021
Pengfei Zhu, Longyin Wen, Dawei Du, Xiao Bian, Heng Fan, Qinghua Hu, and Haibin Ling. Detection and tracking meet drones challenge.IEEE Transactions on Pattern Anal- ysis and Machine Intelligence, 44(11):7380–7399, 2021. 1, 2
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.