SCAPO: Self-Supervised Category-Level Articulated Pose Estimation from a Single 3D Observation
Pith reviewed 2026-06-28 15:23 UTC · model grok-4.3
The pith
A self-supervised model recovers part segmentation, joint axes and articulation states from one RGB-D observation by aligning instances to a learnable canonical template.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Cycle reconstruction loss together with cross-space alignment to a learnable canonical template disentangles shared category geometry from instance-specific residual shape and articulation states, enabling recovery of rigid part segmentation and explicit joint pivots, axes and states from a single RGB-D observation.
What carries the argument
SE(3)-equivariant vector-neuron autoencoder that produces a canonical shape, followed by a joint-aware blend-skinning module that parameterizes part motion relative to that shape.
If this is right
- Consistent part structure is recovered across different instances of the same category.
- Explicit joint parameters (pivots, axes, states) are obtained without ground-truth supervision.
- Performance exceeds prior self-supervised baselines on both synthetic and real articulated-object datasets.
- The representation supports single-view input and does not require multi-frame sequences or category-specific CAD models.
Where Pith is reading between the lines
- The same alignment-plus-template scheme could be tested on categories whose articulation axes are not fixed but vary with load or temperature.
- If the canonical template is replaced by an explicit physical simulator, the recovered parameters might directly drive control policies on real robots.
- Failure on objects whose parts are connected by soft joints would indicate that the rigid-part assumption is the limiting factor.
Load-bearing premise
Cycle reconstruction together with alignment to one learnable canonical template is enough to separate category-level geometry from per-instance shape residuals and articulation without extra labels or priors.
What would settle it
On a held-out articulated object whose movable parts are known, the recovered joint axes and states produce part motion that deviates more than a few millimeters from the actual observed motion under the same articulation commands.
Figures

read the original abstract
Existing methods for category-level object articulation from a single 3D observation often rely on dense supervision, multi-frame inputs, or CAD templates, and still struggle to disentangle geometry from articulation or to recover explicit joint parameters. We propose SCAPO, a self-supervised framework that estimates canonical geometry, rigid part segmentation, and joint pivots, axes, and articulation states from a single RGB-D observation without ground-truth labels or category-specific models. Our SCAPO first uses an SE(3)-equivariant vector-neuron autoencoder to factor out global pose and align diverse instances into a shared canonical space. On this aligned shape, a joint-aware blend-skinning module is then designed to model part motion. We learn this representation through cycle reconstruction between observed and canonical shapes and cross-space alignment with a learnable canonical template that decouples shared category geometry from instance-specific residual shape. Experiments on synthetic and real articulated-object datasets show that our SCAPO recovers consistent part structure and accurate articulation parameters and outperforms all self-supervised baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes SCAPO, a self-supervised framework for category-level articulated pose estimation from a single RGB-D observation. It first applies an SE(3)-equivariant vector-neuron autoencoder to factor out global pose and align instances into canonical space, then uses a joint-aware blend-skinning module to model rigid part motion. Training relies on cycle reconstruction between observed and canonical shapes together with cross-space alignment to a learnable canonical template that separates shared category geometry from instance-specific residual shape. The authors claim that this produces consistent part segmentation and accurate joint pivots, axes, and articulation states, outperforming self-supervised baselines on synthetic and real articulated-object datasets.
Significance. If the disentanglement claim holds with explicit, unique recovery of joint parameters, the work would reduce dependence on dense labels, multi-view inputs, or CAD models in articulated object understanding, with potential impact on robotics and scene reconstruction. The combination of equivariant networks and blend-skinning is a reasonable architectural choice for the problem, but the absence of any quantitative metrics, ablation tables, or error analysis in the visible text prevents assessment of whether the result is practically significant.
major comments (3)
- [Abstract] Abstract: the central experimental claim that SCAPO 'recovers consistent part structure and accurate articulation parameters and outperforms all self-supervised baselines' is unsupported by any reported quantitative metrics, ablation studies, or error analysis; only high-level qualitative statements are provided, leaving the soundness of the result unverifiable.
- [Abstract] Abstract (training objectives): the cycle reconstruction loss and cross-space alignment to the learnable canonical template contain no explicit terms for part rigidity, joint sparsity, or articulation consistency across equivalent observations. This leaves open a degenerate solution in which articulation effects are absorbed into the residual shape code while joint parameters are driven to near-zero or arbitrary values, directly undermining the claim of recovering explicit articulation parameters.
- [Abstract] Abstract (disentanglement): the learnable canonical template is optimized jointly with the reconstruction objective; because the same representation supplies both the template and the instance residual, the decoupling of shared geometry from articulation is at risk of circularity without additional regularization or consistency constraints.
Simulated Author's Rebuttal
We thank the referee for the detailed feedback on our abstract and framework. We agree that the abstract requires strengthening with quantitative support and will revise it accordingly. We address each major comment point-by-point below, clarifying the role of our architectural components while acknowledging where additional regularization or presentation changes are warranted.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central experimental claim that SCAPO 'recovers consistent part structure and accurate articulation parameters and outperforms all self-supervised baselines' is unsupported by any reported quantitative metrics, ablation studies, or error analysis; only high-level qualitative statements are provided, leaving the soundness of the result unverifiable.
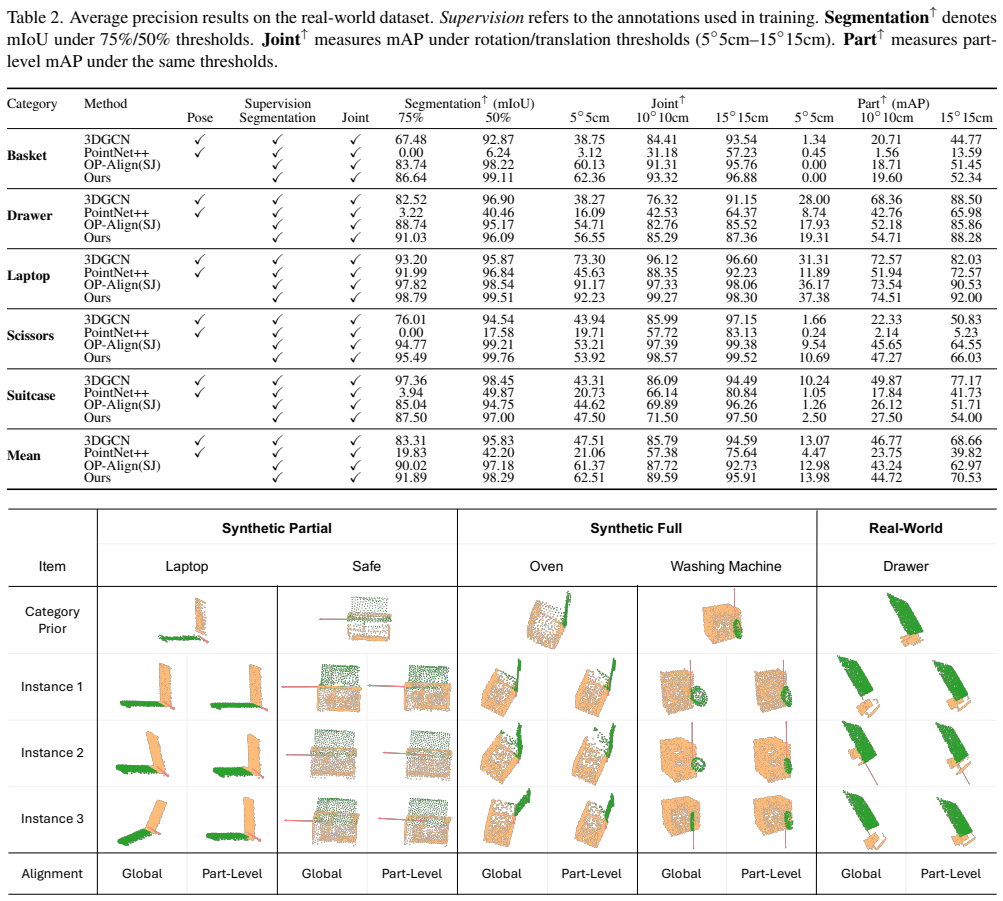
Authors: The abstract is a high-level summary. The full manuscript reports quantitative results on synthetic and real datasets, including part segmentation IoU, joint pivot/axis errors, and articulation angle accuracy, with comparisons to self-supervised baselines and ablations on the equivariant encoder and blend-skinning module. We will revise the abstract to cite key metrics (e.g., average joint error reductions) and reference the experimental tables. revision: yes
-
Referee: [Abstract] Abstract (training objectives): the cycle reconstruction loss and cross-space alignment to the learnable canonical template contain no explicit terms for part rigidity, joint sparsity, or articulation consistency across equivalent observations. This leaves open a degenerate solution in which articulation effects are absorbed into the residual shape code while joint parameters are driven to near-zero or arbitrary values, directly undermining the claim of recovering explicit articulation parameters.
Authors: The joint-aware blend-skinning module parameterizes motion via explicit joint pivots and axes, and the SE(3)-equivariant autoencoder factors global pose before skinning is applied; cycle reconstruction then requires accurate joint parameters to map between observed and canonical spaces. While the abstract does not list auxiliary terms, the skinning formulation inherently penalizes non-rigid deformations. We acknowledge the degeneracy concern and will add an explicit cross-view articulation consistency term in the revised loss. revision: partial
-
Referee: [Abstract] Abstract (disentanglement): the learnable canonical template is optimized jointly with the reconstruction objective; because the same representation supplies both the template and the instance residual, the decoupling of shared geometry from articulation is at risk of circularity without additional regularization or consistency constraints.
Authors: The canonical template is optimized to represent category-shared static geometry, while the residual code is constrained by the cycle reconstruction to capture only instance-specific deviations (including articulation). The SE(3) alignment to canonical space and cross-space matching provide separation; joint parameters are recovered explicitly via the skinning module rather than absorbed into residuals. We maintain that the architecture avoids circularity but will include an additional analysis of template stability in the revision. revision: no
Circularity Check
No circularity; derivation is self-contained optimization
full rationale
The paper describes an SE(3)-equivariant autoencoder followed by joint-aware blend-skinning, trained end-to-end via cycle reconstruction and alignment to a learnable canonical template. This is a standard self-supervised objective that supplies an external reconstruction signal; the claimed disentanglement of geometry, residual shape, and articulation parameters emerges from optimization rather than being defined into existence or fitted on a subset then renamed as a prediction. No equations or steps reduce by construction to the inputs, and no self-citation chain is load-bearing for the central claim.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption SE(3)-equivariant vector-neuron autoencoder factors out global pose to produce aligned canonical shapes
- domain assumption Cycle reconstruction and cross-space alignment suffice to learn part segmentation and joint parameters without labels
Reference graph
Works this paper leans on
-
[1]
Op-align: Object-level and part-level alignment for self-supervised category-level articulated object pose estimation
Yuchen Che, Ryo Furukawa, and Asako Kanezaki. Op-align: Object-level and part-level alignment for self-supervised category-level articulated object pose estimation. InEu- ropean Conference on Computer Vision, pages 72–88. Springer, 2024. 2, 6
2024
-
[2]
Equivariant point network for 3d point cloud analy- sis
Haiwei Chen, Shichen Liu, Weikai Chen, Hao Li, and Ran- dall Hill. Equivariant point network for 3d point cloud analy- sis. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 14514–14523, 2021. 6
2021
-
[3]
Nasa neural articulated shape approxima- tion
Boyang Deng, John P Lewis, Timothy Jeruzalski, Gerard Pons-Moll, Geoffrey Hinton, Mohammad Norouzi, and An- drea Tagliasacchi. Nasa neural articulated shape approxima- tion. InEuropean Conference on Computer Vision, pages 612–628. Springer, 2020. 2
2020
-
[4]
Vector neu- rons: A general framework for so (3)-equivariant networks
Congyue Deng, Or Litany, Yueqi Duan, Adrien Poulenard, Andrea Tagliasacchi, and Leonidas J Guibas. Vector neu- rons: A general framework for so (3)-equivariant networks. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 12200–12209, 2021. 3
2021
-
[5]
Articulatedgs: Self-supervised digital twin modeling of articulated objects using 3d gaussian splatting
Junfu Guo, Yu Xin, Gaoyi Liu, Kai Xu, Ligang Liu, and Ruizhen Hu. Articulatedgs: Self-supervised digital twin modeling of articulated objects using 3d gaussian splatting. InProceedings of the Computer Vision and Pattern Recogni- tion Conference, pages 27144–27153, 2025. 2
2025
-
[6]
Active articulation model estimation through interactive perception
Karol Hausman, Scott Niekum, Sarah Osentoski, and Gau- rav S Sukhatme. Active articulation model estimation through interactive perception. In2015 IEEE International Conference on Robotics and Automation (ICRA), pages 3305–3312. IEEE, 2015. 1, 2
2015
-
[7]
Carto: Category and joint agnostic reconstruction of articulated objects
Nick Heppert, Muhammad Zubair Irshad, Sergey Zakharov, Katherine Liu, Rares Andrei Ambrus, Jeannette Bohg, Ab- hinav Valada, and Thomas Kollar. Carto: Category and joint agnostic reconstruction of articulated objects. InProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 21201–21210, 2023. 2
2023
-
[8]
Ditto: Building digital twins of articulated objects from interaction
Zhenyu Jiang, Cheng-Chun Hsu, and Yuke Zhu. Ditto: Building digital twins of articulated objects from interaction. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 5616–5626, 2022. 2
2022
-
[9]
Shape- pose disentanglement using se (3)-equivariant vector neu- rons
Oren Katzir, Dani Lischinski, and Daniel Cohen-Or. Shape- pose disentanglement using se (3)-equivariant vector neu- rons. InEuropean Conference on Computer Vision, pages 468–484. Springer, 2022. 3
2022
-
[10]
Unsu- pervised pose-aware part decomposition for man-made artic- ulated objects
Yuki Kawana, Yusuke Mukuta, and Tatsuya Harada. Unsu- pervised pose-aware part decomposition for man-made artic- ulated objects. InEuropean Conference on Computer Vision, pages 558–575. Springer, 2022. 1, 2
2022
-
[11]
Cadex: Learning canon- ical deformation coordinate space for dynamic surface rep- resentation via neural homeomorphism
Jiahui Lei and Kostas Daniilidis. Cadex: Learning canon- ical deformation coordinate space for dynamic surface rep- resentation via neural homeomorphism. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 6624–6634, 2022. 2
2022
-
[12]
Category-level articulated ob- ject pose estimation
Xiaolong Li, He Wang, Li Yi, Leonidas J Guibas, A Lynn Abbott, and Shuran Song. Category-level articulated ob- ject pose estimation. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 3706–3715, 2020. 2, 6
2020
-
[13]
Convolution in the cloud: Learning deformable kernels in 3d graph convolution networks for point cloud analysis
Zhi-Hao Lin, Sheng-Yu Huang, and Yu-Chiang Frank Wang. Convolution in the cloud: Learning deformable kernels in 3d graph convolution networks for point cloud analysis. InPro- ceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1800–1809, 2020. 6
2020
-
[14]
Paris: Part-level reconstruction and motion analysis for articulated objects
Jiayi Liu, Ali Mahdavi-Amiri, and Manolis Savva. Paris: Part-level reconstruction and motion analysis for articulated objects. InProceedings of the IEEE/CVF International Con- ference on Computer Vision, pages 352–363, 2023. 2
2023
-
[15]
Self-supervised category-level articulated object pose estimation with part-level SE(3) equivariance
Xueyi Liu, Ji Zhang, Ruizhen Hu, Haibin Huang, He Wang, and Li Yi. Self-supervised category-level articulated object pose estimation with part-level SE(3) equivariance. InThe Eleventh International Conference on Learning Representa- tions, 2023. 1, 2, 6
2023
-
[16]
Hoi4d: A 4d egocentric dataset for category-level human- object interaction
Yunze Liu, Yun Liu, Che Jiang, Kangbo Lyu, Weikang Wan, Hao Shen, Boqiang Liang, Zhoujie Fu, He Wang, and Li Yi. Hoi4d: A 4d egocentric dataset for category-level human- object interaction. InProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, pages 21013–21022, 2022. 6
2022
-
[17]
Smpl: A skinned multi- person linear model
Matthew Loper, Naureen Mahmood, Javier Romero, Gerard Pons-Moll, and Michael J Black. Smpl: A skinned multi- person linear model. InSeminal Graphics Papers: Pushing the Boundaries, Volume 2, pages 851–866. 2023. 2
2023
-
[18]
An integrated approach to visual perception of articulated objects
Roberto Mart ´ın-Mart´ın, Sebastian H¨ofer, and Oliver Brock. An integrated approach to visual perception of articulated objects. In2016 IEEE international conference on robotics and automation (ICRA), pages 5091–5097. IEEE, 2016. 1
2016
-
[19]
Leap: Learning articulated occupancy of people
Marko Mihajlovic, Yan Zhang, Michael J Black, and Siyu Tang. Leap: Learning articulated occupancy of people. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, pages 10461–10471, 2021. 2
2021
-
[21]
A-sdf: Learning disentangled signed distance functions for articulated shape representation
Jiteng Mu, Weichao Qiu, Adam Kortylewski, Alan Yuille, Nuno Vasconcelos, and Xiaolong Wang. A-sdf: Learning disentangled signed distance functions for articulated shape representation. InProceedings of the IEEE/CVF Interna- tional Conference on Computer Vision, pages 13001–13011,
-
[22]
Neural articulated radiance field
Atsuhiro Noguchi, Xiao Sun, Stephen Lin, and Tatsuya Harada. Neural articulated radiance field. InProceedings of the IEEE/CVF International Conference on Computer Vi- sion, pages 5762–5772, 2021. 2
2021
-
[23]
Neural parts: Learning expres- sive 3d shape abstractions with invertible neural networks
Despoina Paschalidou, Angelos Katharopoulos, Andreas Geiger, and Sanja Fidler. Neural parts: Learning expres- sive 3d shape abstractions with invertible neural networks. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 3204–3215, 2021. 2
2021
-
[24]
Self-supervised learn- ing of part mobility from point cloud sequence
Yahao Shi, Xinyu Cao, and Bin Zhou. Self-supervised learn- ing of part mobility from point cloud sequence. InCom- puter Graphics Forum, pages 104–116. Wiley Online Li- brary, 2021. 1, 2
2021
-
[25]
Reacto: Reconstructing articulated ob- jects from a single video
Chaoyue Song, Jiacheng Wei, Chuan Sheng Foo, Guosheng Lin, and Fayao Liu. Reacto: Reconstructing articulated ob- jects from a single video. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 5384–5395, 2024. 2, 4
2024
-
[26]
Cla-nerf: Category-level articulated neural radiance field
Wei-Cheng Tseng, Hung-Ju Liao, Lin Yen-Chen, and Min Sun. Cla-nerf: Category-level articulated neural radiance field. In2022 International Conference on Robotics and Au- tomation (ICRA), pages 8454–8460. IEEE, 2022. 2
2022
-
[27]
Shape2motion: Joint analysis of motion parts and attributes from 3d shapes
Xiaogang Wang, Bin Zhou, Yahao Shi, Xiaowu Chen, Qin- ping Zhao, and Kai Xu. Shape2motion: Joint analysis of motion parts and attributes from 3d shapes. InProceedings of the IEEE/CVF Conference on Computer Vision and Pat- tern Recognition, pages 8876–8884, 2019. 6
2019
-
[28]
Self-supervised neural articulated shape and appearance models
Fangyin Wei, Rohan Chabra, Lingni Ma, Christoph Lassner, Michael Zollh ¨ofer, Szymon Rusinkiewicz, Chris Sweeney, Richard Newcombe, and Mira Slavcheva. Self-supervised neural articulated shape and appearance models. InProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 15816–15826, 2022. 2
2022
-
[29]
Captra: Category-level pose tracking for rigid and articulated objects from point clouds
Yijia Weng, He Wang, Qiang Zhou, Yuzhe Qin, Yueqi Duan, Qingnan Fan, Baoquan Chen, Hao Su, and Leonidas J Guibas. Captra: Category-level pose tracking for rigid and articulated objects from point clouds. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 13209–13218, 2021. 2
2021
-
[30]
Neural implicit representation for building digital twins of unknown articulated objects
Yijia Weng, Bowen Wen, Jonathan Tremblay, Valts Blukis, Dieter Fox, Leonidas Guibas, and Stan Birchfield. Neural implicit representation for building digital twins of unknown articulated objects. InProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, pages 3141–3150, 2024. 2
2024
-
[31]
Banmo: Building animatable 3d neural models from many casual videos
Gengshan Yang, Minh V o, Natalia Neverova, Deva Ra- manan, Andrea Vedaldi, and Hanbyul Joo. Banmo: Building animatable 3d neural models from many casual videos. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, pages 2863–2873, 2022. 4
2022
-
[32]
Iaao: Interactive affordance learning for articulated objects in 3d environments
Can Zhang and Gim Hee Lee. Iaao: Interactive affordance learning for articulated objects in 3d environments. InPro- ceedings of the Computer Vision and Pattern Recognition Conference, pages 12132–12142, 2025. 2
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.