Learning of Robot Safety Policies via Adversarial Synthetic Scenarios
Pith reviewed 2026-06-28 01:09 UTC · model grok-4.3
The pith
An adversarial game between two agents generates synthetic hazards to train robot safety policies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
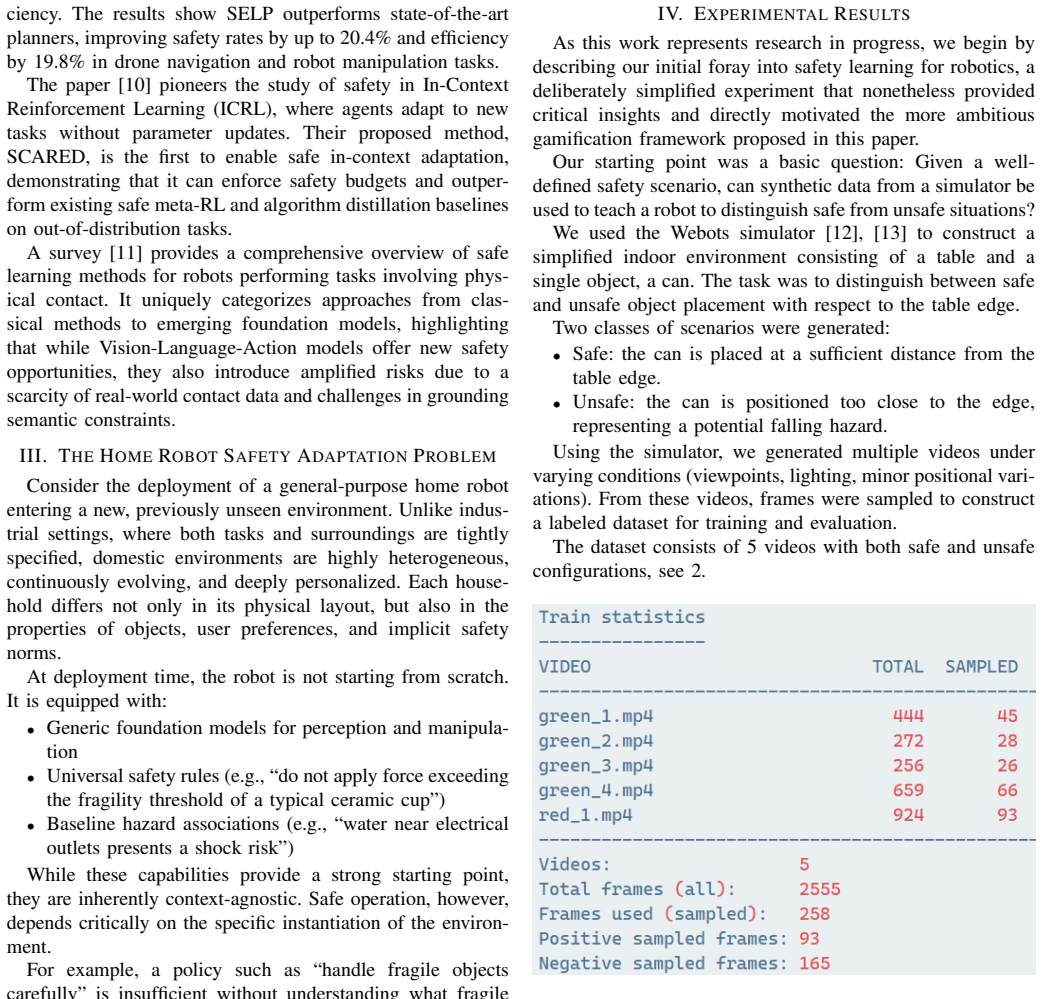
Core claim
Scenario generation is modeled as an adversarial game between a Red Team agent that constructs hazardous situations and a Blue Team agent that incrementally refines safety policies to prevent those situations, allowing efficient discovery of high-risk edge cases unlikely to be captured through random simulation or manual enumeration.
What carries the argument
The agentic gamification framework consisting of a Red Team that explores potential failures and a Blue Team that refines safety policies through iterative adversarial interaction.
If this is right
- High-risk edge cases become discoverable without exhaustive random sampling or manual design.
- Safety policies can be refined iteratively through repeated adversarial scenario creation.
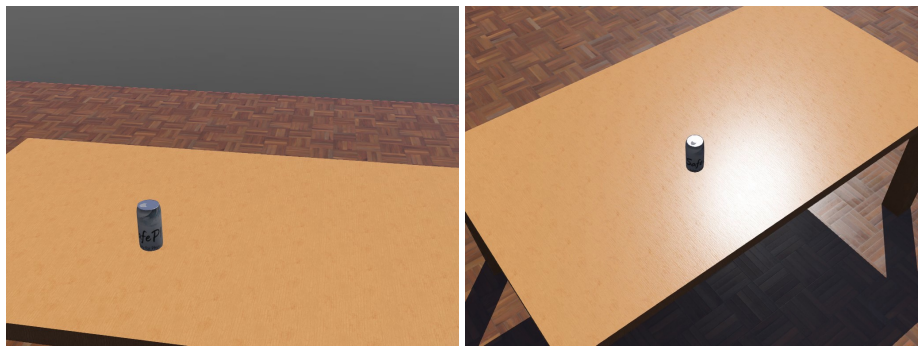
- Classical risk modeling can be combined with adversarial generation to support scalable safety in complex environments.
- The resulting policies are intended to apply to Physical AI systems operating outside controlled simulations.
Where Pith is reading between the lines
- The same Red-Blue structure might be adapted to test safety in other autonomous systems such as self-driving vehicles.
- Performance could be measured by comparing the number of unique hazards found against a baseline of random scenario sampling in the same simulator.
- The framework might benefit from integration with existing robot simulators to generate the synthetic scenarios at scale.
- Transfer success could be checked by logging whether real-world failures match the synthetic ones the game produced.
Load-bearing premise
The adversarial interaction between the two agents will reliably generate safety policies that transfer from synthetic scenarios to actual robot operation.
What would settle it
A controlled real-world robot test in which the learned policies fail to prevent at least one hazard that the synthetic game had identified as high-risk.
Figures


read the original abstract
In this work, we propose an agentic gamification framework for hazard-informed learning of robot safety policies through synthetic scenarios. We model scenario generation as an adversarial game between two agents: a Red Team that explores the space of potential failures by constructing hazardous situations, and a Blue Team that incrementally refines safety policies to prevent them. This iterative process enables efficient discovery of high-risk edge cases that are unlikely to be captured through random simulation or manual enumeration. By combining classical risk modeling with adversarial scenario generation and modern learning paradigms, this work provides a scalable pathway for embedding safety into Physical AI systems operating in complex real-world environments. The paper describes ongoing work. The contribution is a problem formulation and a proposed solution architecture.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an agentic gamification framework for hazard-informed learning of robot safety policies through synthetic scenarios. Scenario generation is modeled as an adversarial game between a Red Team agent that constructs hazardous situations to explore failures and a Blue Team agent that refines safety policies to prevent them. The central claim is that this iterative process enables efficient discovery of high-risk edge cases unlikely to be found via random simulation or manual enumeration. The work combines classical risk modeling with adversarial generation and modern learning paradigms to provide a scalable pathway for safety in Physical AI systems; the contribution is a high-level problem formulation and architecture description presented as ongoing work.
Significance. If the adversarial framework could be shown to outperform random sampling in edge-case discovery and if the resulting policies transfer to physical robots, the approach would offer a potentially significant method for embedding safety into complex robotic systems. The combination of game dynamics with risk modeling addresses a recognized challenge in Physical AI. As presented, however, the manuscript contains no empirical results, theoretical bounds, or validation, so the significance remains entirely prospective.
major comments (2)
- [Abstract] Abstract: The assertion that the Red-Blue adversarial process 'enables efficient discovery of high-risk edge cases that are unlikely to be captured through random simulation or manual enumeration' is load-bearing for the contribution yet is advanced with no supporting analysis, regret bounds, coverage guarantees, simulation results, or comparison to baselines.
- [Problem formulation] Problem formulation (paragraph describing the game): The framework assumes adversarial interaction between Red Team and Blue Team agents will reliably produce safety policies that transfer from synthetic scenarios to real-world robot operation, but no discussion of transfer risks, failure modes, or validation approach is provided.
minor comments (1)
- The abstract states the paper 'describes ongoing work'; a brief clarification of the current implementation status would help readers gauge the maturity of the architecture.
Simulated Author's Rebuttal
We thank the referee for the detailed review. Our manuscript presents ongoing work focused on a problem formulation and high-level architecture for an adversarial gamification framework, without empirical results at this stage. We address the major comments below by clarifying scope and committing to targeted revisions.
read point-by-point responses
-
Referee: [Abstract] The assertion that the Red-Blue adversarial process 'enables efficient discovery of high-risk edge cases that are unlikely to be captured through random simulation or manual enumeration' is load-bearing for the contribution yet is advanced with no supporting analysis, regret bounds, coverage guarantees, simulation results, or comparison to baselines.
Authors: We agree the claim is prospective and unsupported by analysis in the current draft. As the contribution is a formulation rather than validated results, we will revise the abstract to present the efficiency as a hypothesized property of the adversarial game dynamics (targeted exploration vs. random sampling) to be tested in future empirical work, rather than an established outcome. revision: partial
-
Referee: [Problem formulation] The framework assumes adversarial interaction between Red Team and Blue Team agents will reliably produce safety policies that transfer from synthetic scenarios to real-world robot operation, but no discussion of transfer risks, failure modes, or validation approach is provided.
Authors: The manuscript intentionally limits scope to the architecture description. We will add a dedicated paragraph in the problem formulation section outlining key transfer risks (e.g., sim-to-real gaps and distribution shift), potential failure modes, and high-level validation plans including simulation benchmarks and physical experiments, to be expanded in follow-on work. revision: yes
Circularity Check
No circularity: conceptual proposal with no derivations or self-referential reductions
full rationale
The manuscript is explicitly described as ongoing work whose contribution is a problem formulation and proposed architecture for a Red-Blue adversarial game. No equations, fitted parameters, predictions, or first-principles derivations appear in the provided text. The efficiency assertion is stated directly without any supporting chain that reduces to its own inputs by construction. No self-citations, ansatzes, or uniqueness theorems are invoked. Per the rules, absence of any load-bearing step that reduces by definition or fit means the circularity score is 0; the paper is self-contained as a high-level sketch.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Adversarial scenario generation between opposing agents can efficiently discover high-risk edge cases missed by random or manual methods
invented entities (2)
-
Red Team agent
no independent evidence
-
Blue Team agent
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Incoro: In- context learning for robotics control with feedback loops,
J. Y . Zhu, C. G. Cano, D. V . Bermudez, and M. Drozdzal, “Incoro: In- context learning for robotics control with feedback loops,”arXiv preprint arXiv:2402.05188, 2024
-
[2]
N. Di Palo and E. Johns, “Keypoint action tokens enable in-context imitation learning in robotics,”arXiv preprint arXiv:2403.19578, 2024
-
[3]
Robomorph: In- context meta-learning for robot dynamics modeling,
M. B. Bazzi, A. A. Shahid, C. Agia, J. Alora, M. Forgione, D. Piga, F. Braghin, M. Pavone, and L. Roveda, “Robomorph: In- context meta-learning for robot dynamics modeling,”arXiv preprint arXiv:2409.11815, 2024
-
[4]
Inclet: Large language model in-context learning can improve embodied instruction-following,
P.-Y . Wang, J.-C. Pang, C.-Y . Wang, X. Liu, T.-S. Liu, S.-H. Yang, H. Qian, and Y . Yu, “Inclet: Large language model in-context learning can improve embodied instruction-following,” inProceedings of the 24th International Conference on Autonomous Agents and Multiagent Systems, 2025, pp. 2134–2142
2025
-
[5]
Mimicdroid: In-context learning for humanoid robot ma- nipulation from human play videos,
R. Shah, S. Liu, Q. Wang, Z. Jiang, S. Kumar, M. Seo, R. Mart ´ın-Mart´ın, and Y . Zhu, “Mimicdroid: In-context learning for humanoid robot ma- nipulation from human play videos,”arXiv preprint arXiv:2509.09769, 2025
-
[6]
Plug in the safety chip: Enforcing constraints for llm-driven robot agents,
Z. Yang, S. S. Raman, A. Shah, and S. Tellex, “Plug in the safety chip: Enforcing constraints for llm-driven robot agents,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 14 435–14 442
2024
-
[7]
Safeembodai: a safety framework for mobile robots in embodied ai systems,
W. Zhang, X. Kong, T. Braunl, and J. B. Hong, “Safeembodai: a safety framework for mobile robots in embodied ai systems,”arXiv preprint arXiv:2409.01630, 2024
-
[8]
Longsafety: Evaluating long-context safety of large language models,
Y . Lu, J. Cheng, Z. Zhang, S. Cui, C. Wang, X. Gu, Y . Dong, J. Tang, H. Wang, and M. Huang, “Longsafety: Evaluating long-context safety of large language models,” inProceedings of the 63rd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), 2025, pp. 31 705–31 725
2025
-
[9]
Selp: Generating safe and efficient task plans for robot agents with large language models,
Y . Wu, Z. Xiong, Y . Hu, S. S. Iyengar, N. Jiang, A. Bera, L. Tan, and S. Jagannathan, “Selp: Generating safe and efficient task plans for robot agents with large language models,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 2599–2605
2025
-
[10]
Safe In-Context Reinforcement Learning
A. Moeini, M. Kwon, A. K. Bozkurt, Y . Motai, R. Chandra, L. Feng, and S. Zhang, “Safe in-context reinforcement learning,”arXiv preprint arXiv:2509.25582, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[11]
H. Zhang, R. Dai, G. Solak, P. Zhou, Y . She, and A. Ajoudani, “Safe learning for contact-rich robot tasks: A survey from classical learning-based methods to safe foundation models,”arXiv preprint arXiv:2512.11908, 2025
-
[12]
Cyberbotics ltd. webots™: professional mobile robot simu- lation,
O. Michel, “Cyberbotics ltd. webots™: professional mobile robot simu- lation,”International Journal of Advanced Robotic Systems, vol. 1, no. 1, p. 5, 2004
2004
-
[13]
How to pick a mobile robot simulator: A quantitative comparison of coppeliasim, gazebo, morse and webots with a focus on accuracy of motion,
A. Farley, J. Wang, and J. A. Marshall, “How to pick a mobile robot simulator: A quantitative comparison of coppeliasim, gazebo, morse and webots with a focus on accuracy of motion,”Simulation Modelling Practice and Theory, vol. 120, p. 102629, 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.