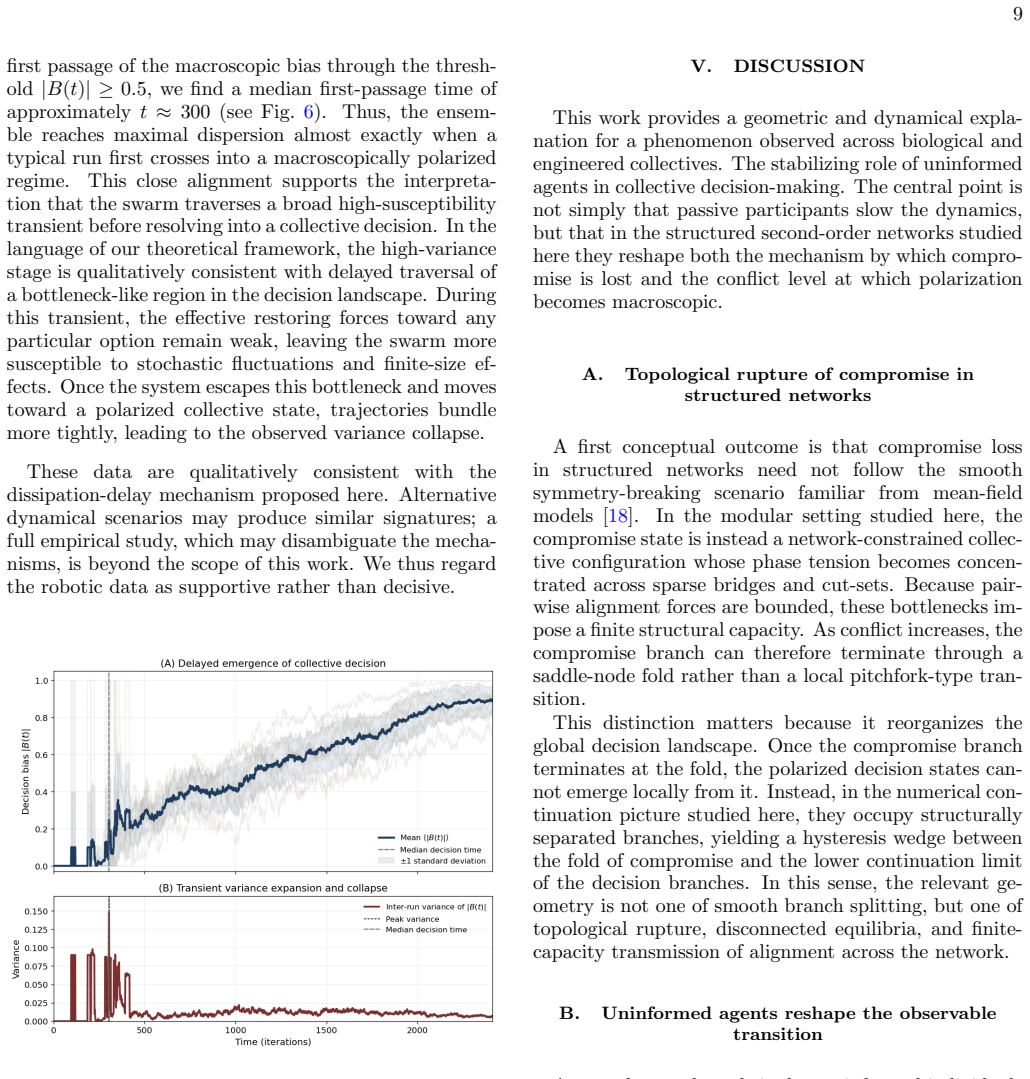
Stabilizing Role of Uninformed Participants in Collective Decision Making
Pith reviewed 2026-06-27 11:04 UTC · model grok-4.3
The pith
Uninformed participants stabilize collective decisions by delaying the onset of polarization through direction-free dissipation without shifting the structural threshold.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Direction-free dissipation contributed by uninformed participants does not alter the static structural threshold at which the compromise branch terminates via saddle-node fold, but it delays escape from the saddle-node ghost and thereby shifts the observable onset of polarization to larger conflicts.
What carries the argument
Direction-free dissipation term within the dissipative Hamiltonian formulation on a structured modular network, which separates polarized branches from the compromise branch and slows escape from the saddle-node ghost.
If this is right
- A locally unique exponentially stable compromise state exists under low conflict.
- The compromise branch terminates through a saddle-node fold rather than a smooth mean-field symmetry-breaking transition.
- Modular polarized states persist on branches locally separated from the compromise branch.
- The observable onset of polarization moves to larger conflicts while the static threshold remains fixed.
Where Pith is reading between the lines
- The same dissipation mechanism could be tested in non-modular networks to check whether branch separation disappears.
- Varying the fraction of uninformed agents in real biological or robotic swarms could measure shifts in observed polarization thresholds.
- Engineered systems might deliberately include neutral agents to raise the effective conflict level needed for polarization.
- The delay effect may interact with other dissipation sources not modeled here.
Load-bearing premise
Uninformed participants contribute strictly direction-free dissipation in the chosen dissipative Hamiltonian formulation on a structured modular network.
What would settle it
A simulation or empirical measurement on a modular network showing that adding agents with direction-free dissipation produces no measurable delay in the onset of polarization beyond the static saddle-node threshold.
Figures





read the original abstract
For groups without strict hierarchy, collective decisions often emerge through compromise. We develop a second-order network model of collective decision-making using a dissipative Hamiltonian formulation, in which informed agents introduce preferred directions while uninformed participants contribute only direction-free dissipation. We show that under low conflict, the model admits a locally unique, exponentially stable compromise state. Using a structured modular network we further show that as conflict increases the local compromise branch terminates through a saddle-node fold rather than through a smooth mean-field symmetry-breaking transition. Modular polarized states persist on branches that are locally separated from the compromise branch. Direction-free dissipation does not shift the static structural threshold, but it delays escape from the saddle-node ghost and pushes the observable onset of polarization to larger conflicts. Our work identifies a dissipation-mediated mechanism, complementary to connectivity-based accounts, through which uninformed participants stabilize collective behavior in biological and engineered swarms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a second-order network model of collective decision-making in a dissipative Hamiltonian formulation on a structured modular network. Informed agents contribute directional biases while uninformed agents add only direction-free dissipation. Under low conflict the model possesses a locally unique exponentially stable compromise equilibrium; as conflict increases this branch terminates at a saddle-node fold. Polarized states exist on locally separated branches. The key result is that direction-free dissipation leaves the static saddle-node threshold unchanged but delays escape from the saddle-node ghost, thereby shifting the observable onset of polarization to higher conflict values. The work positions this dissipation-mediated stabilization as complementary to connectivity-based mechanisms in biological and engineered swarms.
Significance. If the central separation between static threshold and dynamic delay holds, the paper supplies a concrete, dissipation-based account of how uninformed participants can stabilize collective decisions without altering equilibria. The use of an explicitly modular network to keep polarized branches locally separated from the compromise branch, together with the identification of the saddle-node ghost delay, constitutes a clear mechanistic contribution within the field of nonlinear collective dynamics.
major comments (2)
- [Model formulation] Model formulation (dissipative Hamiltonian section): the headline claim that direction-free dissipation does not shift the saddle-node location requires explicit demonstration that the dissipative vector field is orthogonal to the gradient of the conservative potential at the compromise equilibrium. Without showing that the inner product vanishes identically on the critical points (or that the term is constructed to be zero there), the asserted independence of the fold value from dissipation strength remains an assumption rather than a derived property.
- [Bifurcation analysis] Bifurcation analysis (saddle-node section): the statement that polarized branches remain locally separated from the compromise branch relies on the modular network structure. The manuscript should quantify the minimal modularity (e.g., intra- versus inter-module coupling ratio) needed to keep the branches separated; if this ratio is not reported or varied, the separation result cannot be assessed for robustness.
minor comments (2)
- [Abstract] The abstract asserts exponential stability of the compromise state but does not reference the linearization or Lyapunov function used to establish it; adding the relevant equation number would improve traceability.
- [Figures] Figure captions for the bifurcation diagrams should explicitly label the saddle-node ghost region and the observable polarization onset to match the textual description of the delay effect.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We address each major point below.
read point-by-point responses
-
Referee: [Model formulation] Model formulation (dissipative Hamiltonian section): the headline claim that direction-free dissipation does not shift the saddle-node location requires explicit demonstration that the dissipative vector field is orthogonal to the gradient of the conservative potential at the compromise equilibrium. Without showing that the inner product vanishes identically on the critical points (or that the term is constructed to be zero there), the asserted independence of the fold value from dissipation strength remains an assumption rather than a derived property.
Authors: In our dissipative Hamiltonian construction the dissipative term is strictly velocity-dependent and therefore vanishes identically whenever all velocities are zero. Because every equilibrium (including the compromise state and the saddle-node points) occurs at zero velocity, the equilibria are fixed solely by the conservative Hamiltonian vector field. We will insert a short explicit calculation in the revised Model Formulation section showing that the inner product of the dissipative vector field with the gradient of the potential is zero at all critical points of the potential. This derivation confirms that the static saddle-node threshold is independent of dissipation strength. revision: yes
-
Referee: [Bifurcation analysis] Bifurcation analysis (saddle-node section): the statement that polarized branches remain locally separated from the compromise branch relies on the modular network structure. The manuscript should quantify the minimal modularity (e.g., intra- versus inter-module coupling ratio) needed to keep the branches separated; if this ratio is not reported or varied, the separation result cannot be assessed for robustness.
Authors: We agree that an explicit statement of the modularity strengthens the robustness claim. In the revised manuscript we will report the precise intra- versus inter-module coupling ratio used throughout the study and add a brief analytic estimate (or short parameter sweep in the supplement) showing that branch separation is maintained for all ratios above a modest threshold. This addition directly addresses the request for quantification while preserving the mechanistic focus on the modular architecture. revision: yes
Circularity Check
No circularity: model and dissipation term introduced as explicit modeling assumptions
full rationale
The paper constructs a second-order network model via a dissipative Hamiltonian formulation in which the direction-free dissipation contributed by uninformed agents is stated as an input choice. The claimed separation between unchanged static saddle-node threshold and delayed escape from the ghost follows directly from the vector-field structure of that chosen formulation on the modular network; neither the threshold location nor the delay is obtained by fitting parameters to the target observables or by reducing to a self-citation. The derivation chain is therefore self-contained against the stated equations and does not reduce any load-bearing claim to its own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Uninformed participants contribute only direction-free dissipation in the dissipative Hamiltonian formulation.
Reference graph
Works this paper leans on
-
[1]
I. D. Couzin, J. Krause, N. R. Franks, and S. A. Levin, Effective leadership and decision-making in ani- mal groups on the move, Nature433, 513 (2005)
2005
-
[2]
N. E. Leonard, T. Shen, B. Nabet, L. Scardovi, I. D. Couzin, and S. A. Levin, Decision versus compromise for animal groups in motion, Proceedings of the National Academy of Sciences109, 227 (2012)
2012
-
[3]
J. E. Herbert-Read, A. Perna, R. P. Mann, T. M. Schaerf, D. J. Sumpter, and A. J. Ward, Inferring the rules of interaction of shoaling fish, Proceedings of the National Academy of Sciences108, 18726 (2011)
2011
-
[4]
Krause and G
J. Krause and G. D. Ruxton,Living in groups(Oxford 11 University Press, 2002)
2002
-
[5]
Conradt and T
L. Conradt and T. J. Roper, Consensus decision making in animals, Trends in ecology & evolution20, 449 (2005)
2005
-
[6]
D. J. Sumpter, J. Krause, R. James, I. D. Couzin, and A. J. Ward, Consensus decision making by fish, Current Biology18, 1773 (2008)
2008
-
[7]
I. D. Couzin, C. C. Ioannou, G. Demirel, T. Gross, C. J. Torney, A. Hartnett, L. Conradt, S. A. Levin, and N. E. Leonard, Uninformed individuals promote demo- cratic consensus in animal groups, science334, 1578 (2011)
2011
-
[8]
Vicsek, A
T. Vicsek, A. Czir´ ok, E. Ben-Jacob, I. Cohen, and O. Shochet, Novel type of phase transition in a system of self-driven particles, Physical review letters75, 1226 (1995)
1995
-
[9]
C. A. Yates, R. Erban, C. Escudero, I. D. Couzin, C. Buhl, I. G. Kevrekidis, P. K. Maini, and D. J. Sumpter, Inherent noise can facilitate coherence in collec- tive swarm motion, Proceedings of the National Academy of Sciences106, 5464 (2009)
2009
-
[10]
Arganda, A
S. Arganda, A. P´ erez-Escudero, and G. G. de Polavieja, A common rule for decision making in animal collectives across species, Proceedings of the National Academy of Sciences109, 20508 (2012)
2012
-
[11]
J. A. Marshall, R. Bogacz, A. Dornhaus, R. Planqu´ e, T. Kovacs, and N. R. Franks, On optimal decision- making in brains and social insect colonies, Journal of the Royal Society Interface6, 1065 (2009)
2009
-
[12]
Deneubourg, S
J.-L. Deneubourg, S. Aron, S. Goss, and J. M. Pasteels, The self-organizing exploratory pattern of the argentine ant, Journal of insect behavior3, 159 (1990)
1990
-
[13]
J. I. Gold and M. N. Shadlen, The neural basis of decision making, Annu. Rev. Neurosci.30, 535 (2007)
2007
-
[14]
Ratcliff and G
R. Ratcliff and G. McKoon, The diffusion decision model: theory and data for two-choice decision tasks, Neural computation20, 873 (2008)
2008
-
[15]
Kuramoto, International symposium on mathematical problems in theoretical physics, Lecture notes in Physics 30, 420 (1975)
Y. Kuramoto, International symposium on mathematical problems in theoretical physics, Lecture notes in Physics 30, 420 (1975)
1975
-
[16]
G. M. Grason, Perspective: Geometrically frustrated as- semblies, The Journal of Chemical Physics145(2016)
2016
-
[17]
S. M. Giampaolo, G. Gualdi, A. Monras, and F. Illu- minati, Characterizing and Quantifying Frustration in Quantum Many-Body Systems, Phys. Rev. Lett.107, 260602 (2011), arXiv:1103.0022 [cond-mat.other]
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[18]
Nabet, N
B. Nabet, N. E. Leonard, I. D. Couzin, and S. A. Levin, Dynamics of decision making in animal group motion, Journal of nonlinear science19, 399 (2009)
2009
-
[19]
Valentini, E
G. Valentini, E. Ferrante, H. Hamann, and M. Dorigo, Collective decision with 100 kilobots: Speed versus ac- curacy in binary discrimination problems, Autonomous agents and multi-agent systems30, 553 (2016)
2016
-
[20]
J. Lawry and M. Crosscombe, Robust dis- tributed decision-making in robot swarms, 10.5523/bris.2dh47v1ak21vi22o5pn5ki1tpy (2017)
-
[21]
Crosscombe, J
M. Crosscombe, J. Lawry, S. Hauert, and M. Homer, Robust distributed decision-making in robot swarms: Exploiting a third truth state, in2017 IEEE/RSJ in- ternational conference on intelligent robots and systems (IROS)(IEEE, 2017) pp. 4326–4332
2017
-
[22]
Olfati-Saber, J
R. Olfati-Saber, J. A. Fax, and R. M. Murray, Consen- sus and cooperation in networked multi-agent systems, Proceedings of the IEEE95, 215 (2007)
2007
-
[23]
Cavagna and I
A. Cavagna and I. Giardina, Bird flocks as condensed matter, Annu. Rev. Condens. Matter Phys.5, 183 (2014)
2014
-
[24]
Attanasi, A
A. Attanasi, A. Cavagna, L. Del Castello, I. Giardina, S. Melillo, L. Parisi, O. Pohl, B. Rossaro, E. Shen, E. Sil- vestri,et al., Collective behaviour without collective or- der in wild swarms of midges, PLoS computational biol- ogy10, e1003697 (2014)
2014
-
[25]
Y. Katz, K. Tunstrøm, C. C. Ioannou, C. Huepe, and I. D. Couzin, Inferring the structure and dynamics of interactions in schooling fish, Proceedings of the National Academy of Sciences108, 18720 (2011)
2011
-
[26]
J. W. Jolles, N. J. Boogert, V. H. Sridhar, I. D. Couzin, and A. Manica, Consistent individual differences drive collective behavior and group functioning of schooling fish, Current Biology27, 2862 (2017)
2017
-
[27]
Ballerini, N
M. Ballerini, N. Cabibbo, R. Candelier, A. Cavagna, E. Cisbani, I. Giardina, V. Lecomte, A. Orlandi, G. Parisi, A. Procaccini,et al., Interaction ruling an- imal collective behavior depends on topological rather than metric distance: Evidence from a field study, Pro- ceedings of the national academy of sciences105, 1232 (2008)
2008
-
[28]
Strandburg-Peshkin, C
A. Strandburg-Peshkin, C. R. Twomey, N. W. Bode, A. B. Kao, Y. Katz, C. C. Ioannou, S. B. Rosenthal, C. J. Torney, H. S. Wu, S. A. Levin,et al., Visual sen- sory networks and effective information transfer in ani- mal groups, Current Biology23, R709 (2013)
2013
-
[29]
Olfati-Saber and R
R. Olfati-Saber and R. M. Murray, Consensus problems in networks of agents with switching topology and time- delays, IEEE Transactions on automatic control49, 1520 (2004)
2004
-
[30]
K. E. Muller and P. W. Stewart,Linear model theory: univariate, multivariate, and mixed models(John Wiley & Sons, 2006)
2006
-
[31]
Y. A. Kuznetsov,Elements of applied bifurcation theory (Springer, 1998). 12 SUPPLEMENTARY INFORMATION Appendix A: Port-Contact-Hamiltonian Formulation Each agent evolves on a three-dimensional contact manifold (Mi, ηi) equipped with the contact one-form ηi =dz i −p idθi,(A1) whereθ i ∈S 1 denotes the agent’s heading,p i ∈Ris a momentum-like activity varia...
1998
-
[32]
Removing the contact termγ izi, since it is not part of the conservative (θ, p)-energy
-
[33]
Summing the remaining (θ i, pi)-dependent contri- butions over all nodes
-
[34]
Under this prescription, it follows that H(θ,p) = NX i=1 1 2 p2 i −α i cos(θi −ϕ i) − κ 2 X i,j aij cos(θj−θi)
A factor 1/2 is included in the interaction term to avoid double-counting edges. Under this prescription, it follows that H(θ,p) = NX i=1 1 2 p2 i −α i cos(θi −ϕ i) − κ 2 X i,j aij cos(θj−θi). We then differentiateHwhich yields the intermediate result ˙H= NX i=1 h pi ˙pi +α i sin(θi −ϕ i) ˙θi i − κ 2 d dt X i,j aij cos(θj −θ i). For the interaction term w...
-
[35]
16 Thus the linearized system is a damped second-order system with a positive-definite stiffness matrix−J(∆) and a positive-definite damping matrix Γ
By continuity ofJ(∆) along the equilibrium branch, since J0 =−(diag(α) +κL), the matrixJ(∆) remains negative definite for sufficiently small ∆. 16 Thus the linearized system is a damped second-order system with a positive-definite stiffness matrix−J(∆) and a positive-definite damping matrix Γ. Equivalently, the linearization matrix A(∆) := 0I J(∆)−Γ has n...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.