EventRadar: Long-Range Visual UAV Discovery through Spatiotemporal Event Sensing
Pith reviewed 2026-06-27 13:10 UTC · model grok-4.3
The pith
Event cameras detect UAVs at 700-1500 m by recovering propeller timing periodicity after spatial cues weaken.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
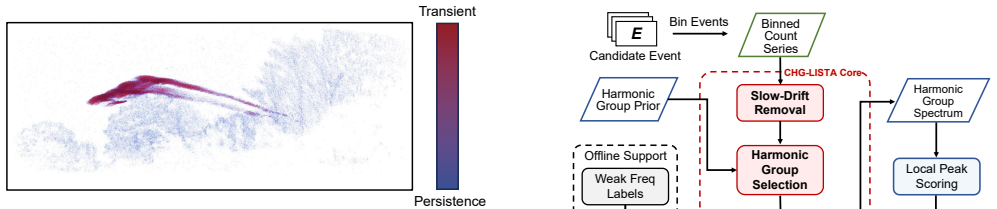
EventRadar follows a complementary cue: propeller-induced temporal periodicity, which recent event-camera sensing studies have shown can reveal UAV-specific motion after appearance becomes weak. Scene-Anchored Geometry Evidence (SAGE) fuses scanning events with IMU pose to maintain a bearing-indexed scene memory, separating transient candidate support from persistent background clutter. Comb-guided Harmonic-Group Learned Iterative Shrinkage and Thresholding Algorithm (CHG) then treats each candidate as a weak high-rate timing signal and recovers phase-insensitive harmonic evidence with fixed compute. Compared with related event-camera baselines on 700-1500 m UAV event recordings, EventRadar
What carries the argument
Scene-Anchored Geometry Evidence (SAGE) that fuses events with IMU pose to create bearing-indexed scene memory, combined with Comb-guided Harmonic-Group L ISTA (CHG) that extracts phase-insensitive harmonic evidence from weak timing candidates.
If this is right
- Enables detection and bearing support when target image-plane footprint shrinks at kilometer ranges.
- Separates transient UAV candidates from persistent clutter using bearing-indexed memory.
- Recovers harmonic evidence from weak high-rate signals with fixed per-candidate compute.
- Achieves the reported mAP, F1 and false-negative numbers on the 700-1500 m test set.
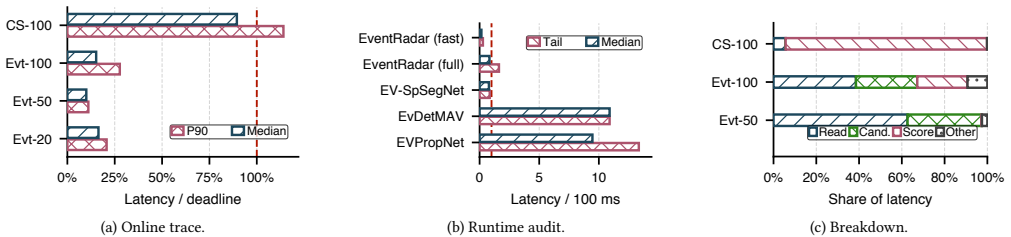
- Demonstrates real-time operation on the event-camera plus IMU prototype hardware.
Where Pith is reading between the lines
- The timing cue could be fused with conventional frame cameras to handle both long and short ranges in a single system.
- The bearing-indexed memory structure might support simultaneous tracking of multiple periodic sources.
- Performance may vary with propeller speed changes caused by wind or load, requiring on-line harmonic template adaptation.
- The same periodicity extraction could apply to ground-based rotating machinery in security or industrial monitoring.
Load-bearing premise
Propeller-induced temporal periodicity remains a reliable and distinguishable signal at long ranges where spatial cues fail, and SAGE fusion maintains accurate bearing-indexed scene memory without large errors from IMU or event data.
What would settle it
Event recordings from a known UAV at 1200 m where the recovered harmonic groups are absent or the SAGE bearing memory accumulates errors that exceed the detection threshold.
Figures
read the original abstract
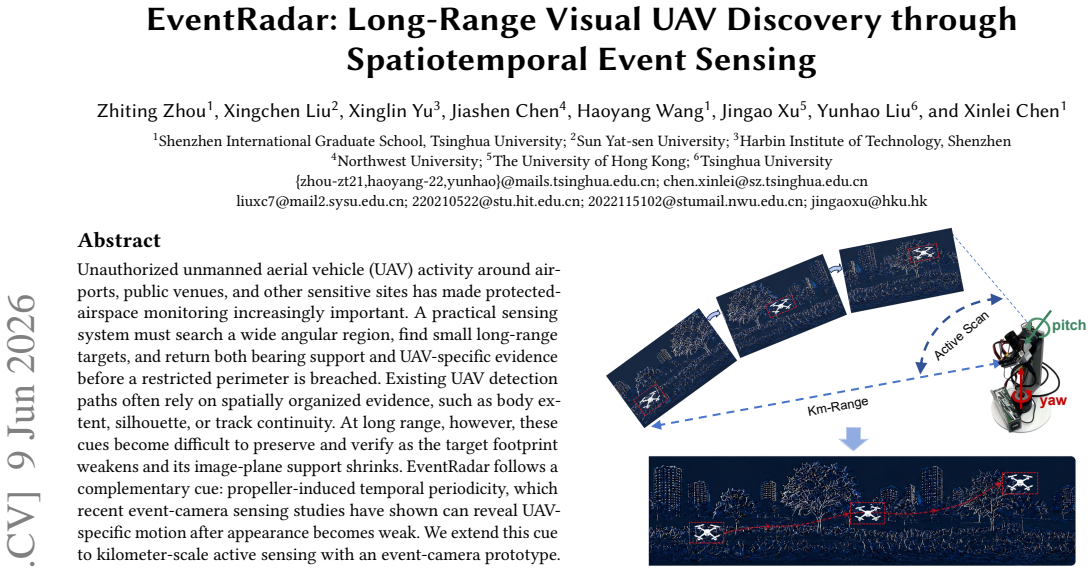
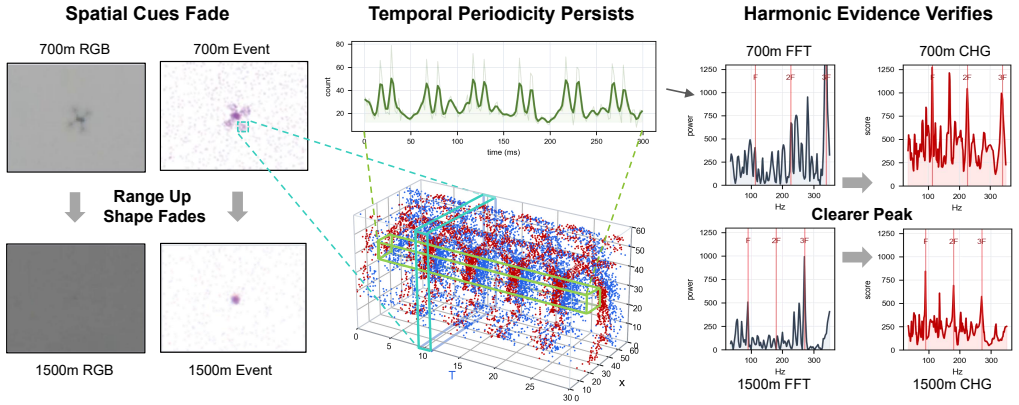
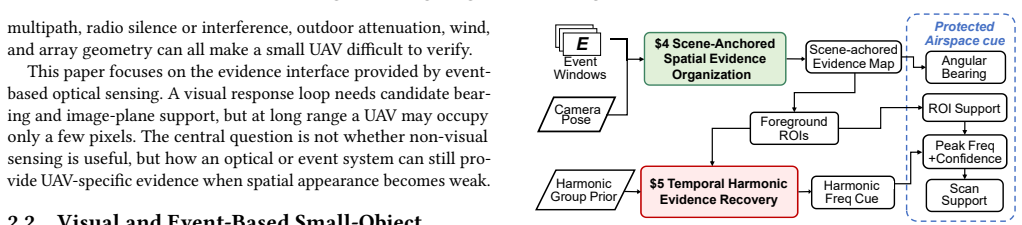
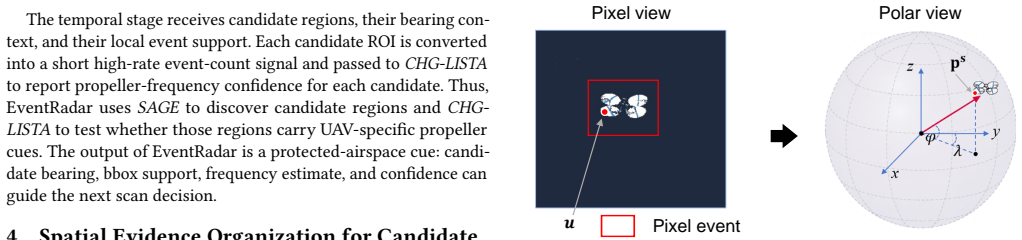
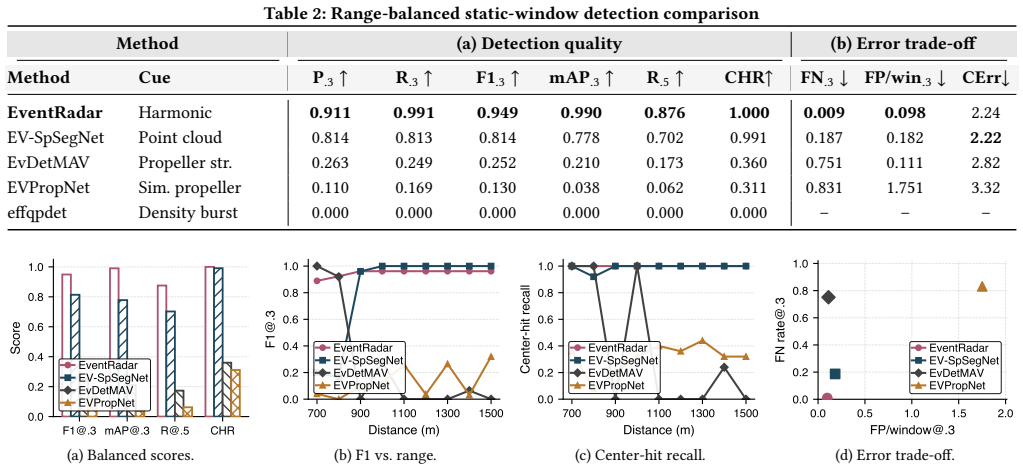
Unauthorized unmanned aerial vehicle (UAV) activity around airports, public venues, and other sensitive sites has made protected-airspace monitoring increasingly important. A practical sensing system must search a wide angular region, find small long-range targets, and return both bearing support and UAV-specific evidence before a restricted perimeter is breached. Existing UAV detection paths often rely on spatially organized evidence, such as body extent, silhouette, or track continuity. At long range, however, these cues become difficult to preserve and verify as the target footprint weakens and its image-plane support shrinks. EventRadar follows a complementary cue: propeller-induced temporal periodicity, which recent event-camera sensing studies have shown can reveal UAV-specific motion after appearance becomes weak. We extend this cue to kilometer-scale active sensing with an event-camera prototype. Scene-Anchored Geometry Evidence (SAGE) fuses scanning events with IMU pose to maintain a bearing-indexed scene memory, separating transient candidate support from persistent background clutter. Comb-guided Harmonic-Group Learned Iterative Shrinkage and Thresholding Algorithm (CHG) then treats each candidate as a weak high-rate timing signal and recovers phase-insensitive harmonic evidence with fixed compute. Compared with related event-camera baselines on 700-1500 m UAV event recordings, EventRadar achieves 0.990 mAP$_{.3}$ and 0.949 F1$_{.3}$, reduces FN$_{.3}$ to 0.009, and shows real-time feasibility in prototype profiling.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
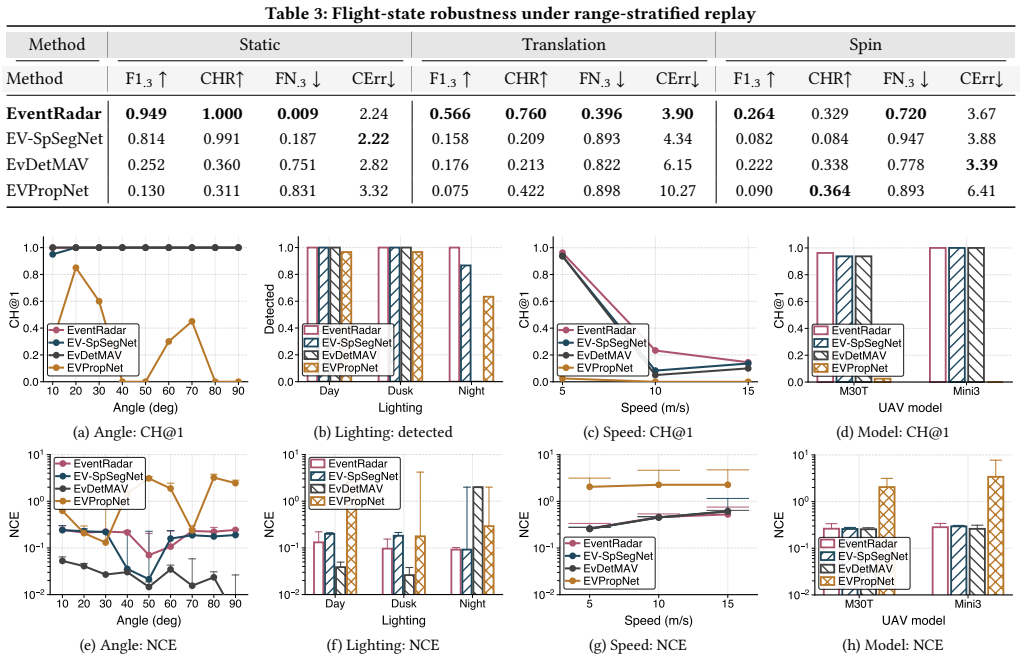
Summary. The manuscript presents EventRadar, a system for long-range (700-1500 m) UAV detection using event cameras. It exploits propeller-induced temporal periodicity as a cue when spatial features weaken, introducing Scene-Anchored Geometry Evidence (SAGE) to fuse scanning events with IMU pose for maintaining bearing-indexed scene memory and separating transient candidates from clutter. Comb-guided Harmonic-Group Learned Iterative Shrinkage and Thresholding Algorithm (CHG) recovers phase-insensitive harmonic evidence from weak high-rate timing signals with fixed compute. On UAV event recordings, it reports 0.990 mAP.3, 0.949 F1.3, and FN.3 reduced to 0.009 versus related event-camera baselines, along with real-time feasibility in prototype profiling.
Significance. If the central claims hold, the work has clear significance for protected-airspace monitoring applications, where spatial cues fail at long range; the temporal periodicity approach from event cameras provides a complementary sensing modality. The paper builds directly on established event-camera properties and IMU integration rather than introducing ad-hoc entities, and the reported real-time prototype profiling is a concrete strength that supports practical utility.
minor comments (1)
- The abstract uses non-standard metric notation (mAP.3, F1.3, FN.3); the full manuscript should explicitly define these (e.g., mAP at IoU threshold 0.3) and report the exact evaluation protocol, including how bounding boxes or bearings are derived from event data.
Simulated Author's Rebuttal
We thank the referee for their review. The provided report accurately summarizes the manuscript but lists no specific major comments under the MAJOR COMMENTS section. Accordingly, we have no point-by-point responses to offer. We remain available to address any additional questions or clarifications.
Circularity Check
No significant circularity
full rationale
The paper describes an empirical sensing pipeline (SAGE fusion of scanning events with IMU pose, followed by CHG for harmonic recovery) whose central claims are performance numbers (0.990 mAP.3 etc.) measured on external 700-1500 m recordings. No equations, parameter fits, or uniqueness theorems are presented that reduce the reported metrics or the core cue (propeller periodicity) to a self-definition or to a prior result authored by the same team. The approach cites established event-camera properties rather than importing load-bearing results from the authors' own prior work. This is the normal case of a self-contained experimental system.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
David El-Chai Ben-Ezra, Ron Arad, Ayelet Padowicz, and Israel Tugendhaft. 2026. Probabilistic Approach for Detection of High-Frequency Periodic Signals Using an Event Camera.New Mathematics and Natural Computation22, 01 (2026), 99–110
2026
-
[2]
Luca Berlincioni, Gabriele Magrini, Federico Becattini, Pietro Pala, and Alberto Del Bimbo
-
[3]
arXiv:2603.08386 [cs.CV] https://arxiv.org/abs/2603.08386
DDHF: Real-Time Drone Detection in Event Cameras via Per-Pixel Frequency Analysis. arXiv:2603.08386 [cs.CV] https://arxiv.org/abs/2603.08386
-
[4]
Megan Birch, James Rick, Adrish Kar, Jason Zutty, and Joseph L. Greene. 2026. Frequency- Domain Event-Based Imaging for Selective Surveillance. arXiv:2605.15392 [physics.optics] https://arxiv.org/abs/2605.15392
Pith/arXiv arXiv 2026
-
[5]
Nuo Chen, Chao Xiao, Yimian Dai, Shiman He, Miao Li, and Wei An. 2025. Event- based Tiny Object Detection: A Benchmark Dataset and Baseline. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV). IEEE/CVF, Honolulu, HI, USA, 7209–7218. https://openaccess.thecvf.com/content/ICCV2025/html/Chen_Event-based_Tiny_ Object_Detection_A_...
2025
-
[6]
Xuecheng Chen, Jingao Xu, Wenhua Ding, Haoyang Wang, Xinyu Luo, Ruiyang Duan, Jialong Chen, Xueqian Wang, Yunhao Liu, and Xinlei Chen. 2026. Count every rotation and every rotation counts: Exploring drone dynamics via propeller sensing. InProceedings of the 2026 ACM/IEEE International Conference on Embedded Artificial Intelligence and Sensing Systems. 746–760
2026
-
[7]
Florin-Lucian Chiper, Alexandru Martian, Calin Vladeanu, Ion Marghescu, Razvan Craciunescu, and Octavian Fratu. 2022. Drone Detection and Defense Systems: Survey and a Software- Defined Radio-Based Solution.Sensors22, 4 (2022), 1453
2022
-
[8]
Angelo Coluccia, Gianluca Parisi, and Alessio Fascista. 2020. Detection and classification of multirotor drones in radar sensor networks: A review.Sensors20, 15 (2020), 4172
2020
-
[9]
Cybersecurity and Infrastructure Security Agency. 2025. Unmanned Aircraft System Detection Technology Guidance. Retrieved June 5, 2026 from https://www.cisa.gov/resources-tools/ resources/unmanned-aircraft-system-detection-technology-guidance
2025
-
[10]
Cybersecurity and Infrastructure Security Agency. 2026. Protect Critical Infrastructure and Public Gatherings. Retrieved June 5, 2026 from https://www.cisa.gov/topics/physical-security/ be-air-aware/protect-critical-infrastructure-and-public-gatherings
2026
-
[11]
Yifei Dong, Fengyi Wu, Sanjian Zhang, Guangyu Chen, Yuzhi Hu, Masumi Yano, Jingdong Sun, Siyu Huang, Feng Liu, Qi Dai, et al. 2025. Securing the Skies: A Comprehensive Survey on Anti-UAV Methods, Benchmarking, and Future Directions. InProceedings of the Computer Vision and Pattern Recognition Conference. 6659–6673. 12
2025
-
[12]
Federal Aviation Administration. 2026. Restricting Drones Near Critical Infrastructure Sites. Retrieved June 5, 2026 from https://www.faa.gov/newsroom/restricting-drones-near-critical- infrastructure-sites
2026
-
[13]
Luis Garcia Rodriguez, Jonas Konrad, Dominik Drees, and Benjamin Risse. 2025. S-ROPE: Spectral Frame Representation of Periodic Events. InComputer Vision – ECCV 2024 Workshops (Lecture Notes in Computer Science, Vol. 15646). Springer, Milan, Italy, 307–324. doi:10.1007/978- 3-031-92460-6_19
-
[14]
Mathias Gehrig and Davide Scaramuzza. 2023. Recurrent Vision Transformers for Object Detection with Event Cameras. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 13884–13893
2023
-
[15]
Gabriel Jekaterynczuk and Zbigniew Piotrowski. 2025. Outdoor Microphone Range Tests and Spectral Analysis of UAV Acoustic Signatures for Array Development.Sensors25, 22 (2025),
2025
-
[16]
doi:10.3390/s25227057
-
[17]
Yanyi Lyu, Zhunga Liu, Huandong Li, Dongxiu Guo, and Yimin Fu. 2023. A real-time and lightweight method for tiny airborne object detection. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 3016–3025
2023
-
[18]
Gabriele Magrini, Lorenzo Berlincioni, Federico Becattini, Luca Cultrera, and Pietro Pala
-
[19]
InProceedings of the IEEE/CVF Interna- tional Conference on Computer Vision (ICCV) Workshops
Drone Detection with Event Cameras. InProceedings of the IEEE/CVF Interna- tional Conference on Computer Vision (ICCV) Workshops. IEEE/CVF, Honolulu, HI, USA, 4762–4773. https://openaccess.thecvf.com/content/ICCV2025W/NeVi/html/Magrini_Drone_ Detection_with_Event_Cameras_ICCVW_2025_paper.html
-
[20]
Gabriele Magrini, Luca Berlincioni, Federico Becattini, Pietro Pala, and Alberto Del Bimbo
-
[21]
In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops
EV-Flying: An Event-Based Dataset for In-The-Wild Recognition of Flying Objects. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. 4947–4955
-
[22]
MarketsandMarkets. 2025. Anti-Drone Market Size, Share & Trends, 2025 To 2030. Retrieved June 5, 2026 from https://www.marketsandmarkets.com/Market-Reports/anti-drone-market- 177013645.html
2025
-
[23]
Narayanan, Bryan Tsang, and Ramesh Bharadwaj
Ram M. Narayanan, Bryan Tsang, and Ramesh Bharadwaj. 2023. Classification and Discrimina- tion of Birds and Small Drones Using Radar Micro-Doppler Spectrogram Images.Signals4, 2 (2023), 337–358. https://www.mdpi.com/2624-6120/4/2/18
2023
-
[24]
Denis Ojdanić, Andreas Sinn, Christopher Naverschnigg, and Georg Schitter. 2023. Feasibility analysis of optical UAV detection over long distances using robotic telescopes.IEEE Trans. Aerospace Electron. Systems59, 5 (2023), 5148–5157
2023
-
[25]
Etienne Perot, Pierre de Tournemire, Davide Nitti, Jonathan Masci, and Amos Sironi. 2020. Learning to Detect Objects with a 1 Megapixel Event Camera. InAdvances in Neural Information Processing Systems, Vol. 33. 16639–16652
2020
-
[26]
Bernd Pfrommer. 2022. Frequency Cam: Imaging Periodic Signals in Real-Time. arXiv:2211.00198 [cs.CV] https://arxiv.org/abs/2211.00198
arXiv 2022
-
[27]
Sanket, Chahat Deep Singh, Chethan M
Nitin J. Sanket, Chahat Deep Singh, Chethan M. Parameshwara, Cornelia Fermüller, Guido C. H. E. de Croon, and Yiannis Aloimonos. 2021. EVPropNet: Detecting Drones by Finding Propellers for Mid-Air Landing and Following. InRobotics: Science and Systems XVII. Robotics: Science and Systems Foundation, Virtual. doi:10.15607/RSS.2021.XVII.074
-
[28]
Ulzhalgas Seidaliyeva, Lyazzat Ilipbayeva, Kyrmyzy Taissariyeva, Nurzhigit Smailov, and Eric T. Matson. 2024. Advances and Challenges in Drone Detection and Classification Techniques: A State-of-the-Art Review.Sensors24, 1 (2024), 125. doi:10.3390/s24010125
-
[29]
Radim Špetlík, Tereza Uhrová, and Jiří Matas. 2025. Efficient Real-Time Quadcopter Propeller Detection and Attribute Estimation with High-Resolution Event Camera. InImage Analysis. Springer, 245–260. doi:10.1007/978-3-031-95911-0_16
-
[30]
T. C. Stewart, M. Drouin, M. Picard, F. B. D. Dizeu, Antony Orth, and Guillaume Gagné. 2022. A Virtual Fence for Drones: Efficiently Detecting Propeller Blades with a DVXplorer Event Camera. InProceedings of the 17th International Conference on Systems. doi:10.1145/3546790.3546800
-
[31]
Yimiao Sun, Weiguo Wang, Luca Mottola, Ruijin Wang, and Yuan He. 2022. Aim: Acoustic inertial measurement for indoor drone localization and tracking. InProceedings of the 20th ACM Conference on Embedded Networked Sensor Systems. 476–488
2022
-
[32]
Diana Tejera-Berengue, Fangfang Zhu-Zhou, Manuel Utrilla-Manso, Roberto Gil-Pita, and Manuel Rosa-Zurera. 2024. Analysis of distance and environmental impact on UAV acoustic detection.Electronics13, 3 (2024), 643
2024
-
[33]
Ravi Kumar Thakur, Luis Granados Segura, Jan Klivan, Radim Špetlík, Tobiáš Vinklárek, Matouš Vrba, and Martin Saska. 2026. Relative State Estimation using Event-Based Propeller Sensing. arXiv:2604.18289 [cs.RO] https://arxiv.org/abs/2604.18289
Pith/arXiv arXiv 2026
-
[34]
Haoyang Wang, Jingao Xu, Xinyu Luo, Ting Zhang, Xuecheng Chen, Ruiyang Duan, Yunhao Liu, Jianfeng Zheng, Weijie Hong, Xiaoqiang Ji, et al . 2026. mme-loc: Facilitating accurate drone landing with ultra-high-frequency localization.IEEE Transactions on Mobile Computing (2026)
2026
-
[35]
Wenhao Xu, Chuyu Wang, Qiancheng Jin, Yanling Bu, Lei Xie, and Sanglu Lu. 2025. mmUAVsense: mmWave Radar-based UAV Detection via Fine-grained Rotary Sensing. In2025 IEEE 45th International Conference on Distributed Computing Systems (ICDCS). IEEE, 593–603
2025
-
[36]
Weiqi Yan, Lixin Chen, Xiangru Hou, Zhipeng Cai, Youbiao Wang, Yangyang Shi, Yu Zang, and Cheng Wang. 2026. M2E-UAV: A Benchmark and Analysis for Onboard Motion-on-Motion Event-Based Tiny UAV Detection. arXiv:2605.10496 [cs.CV] https://arxiv.org/abs/2605.10496
Pith/arXiv arXiv 2026
-
[37]
Yin Zhang, Zian Ning, Xiaoyu Zhang, Shiliang Guo, Peidong Liu, and Shiyu Zhao. 2025. EvDet- MAV: Generalized MAV Detection From Moving Event Cameras.IEEE Robotics and Automation Letters10, 8 (2025), 8236–8243. doi:10.1109/LRA.2025.3585389 13
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.