PolyFlow: Safe and Efficient Polytope-Constrained Flow Matching with Constraint Embedding and Projection-free Update
Pith reviewed 2026-06-27 07:00 UTC · model grok-4.3
The pith
PolyFlow embeds polytope constraints directly into flow matching dynamics to guarantee strict satisfaction at every step without projections or discretization errors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
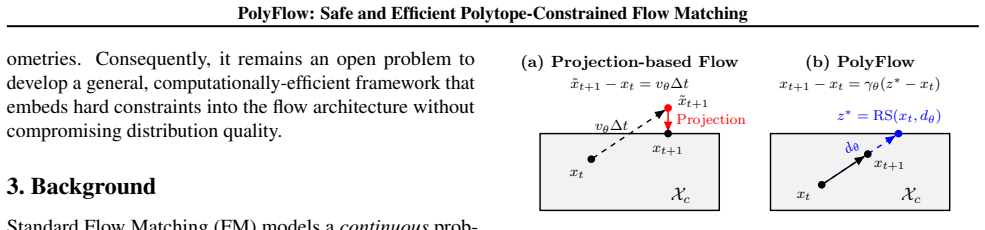
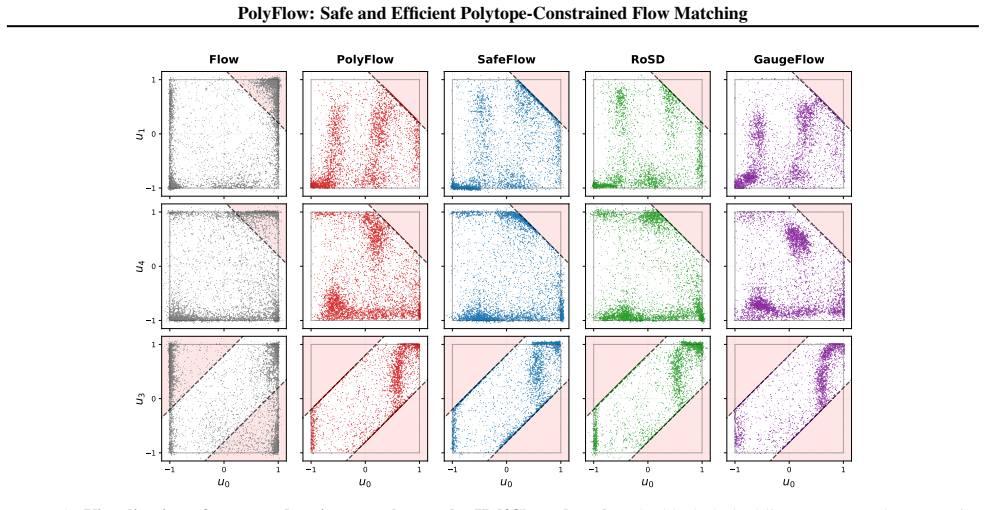
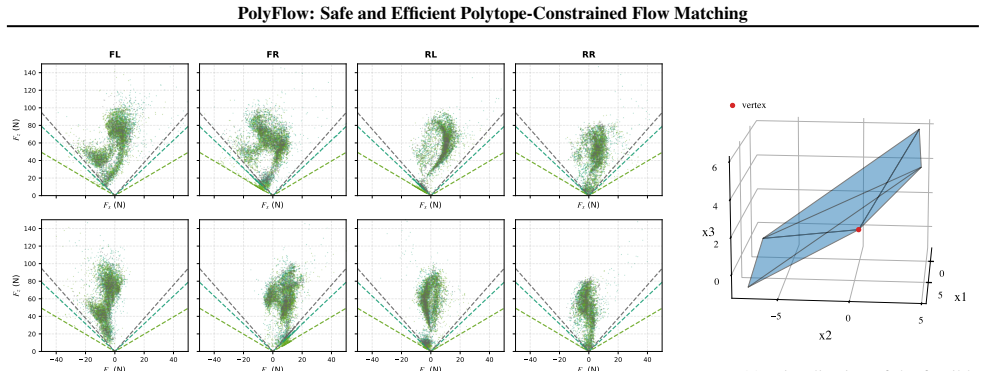
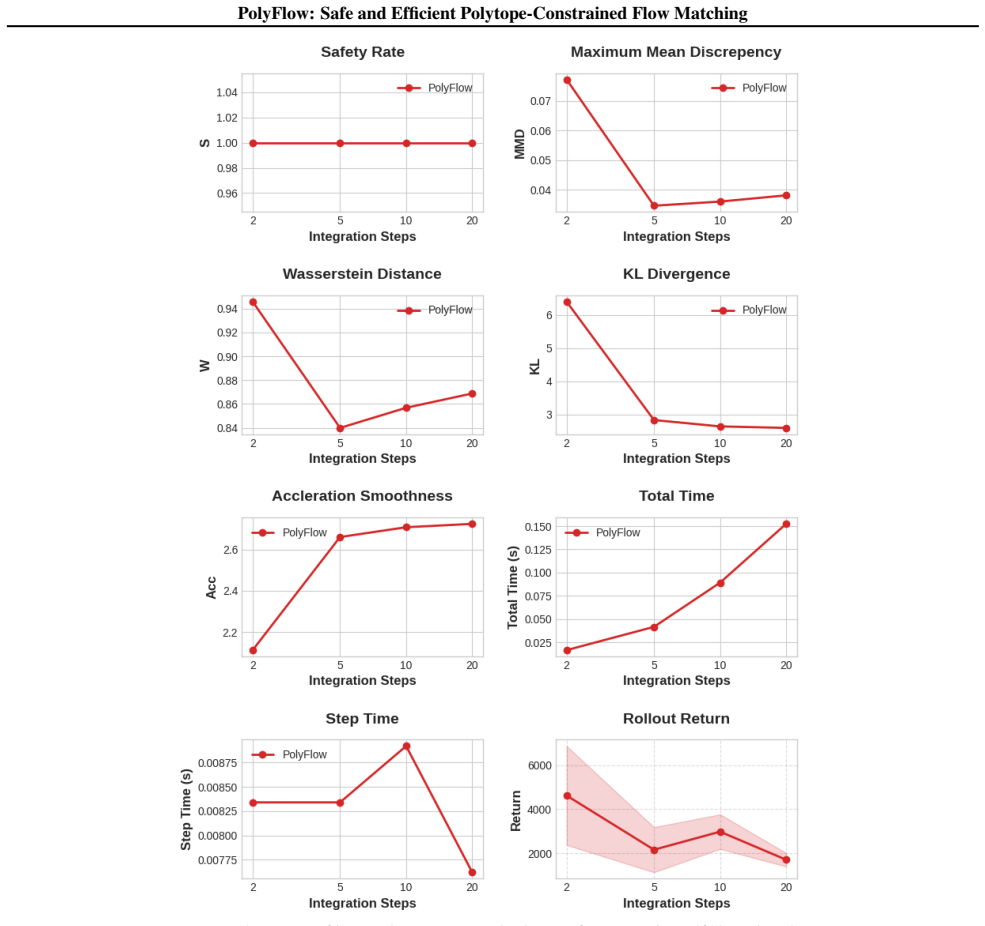
PolyFlow introduces a discrete-time flow formulation and a projection-free architecture that embed constraints directly into the model and flow dynamics, thereby eliminating discretization error and guaranteeing strict satisfaction of arbitrary polyhedral constraints at every step without expensive iterative solvers, while experimental results confirm zero constraint violation and maintained distributional fidelity on planning and control tasks.
What carries the argument
Constraint embedding paired with a projection-free update in the discrete-time flow matching model, which enforces polytope satisfaction inside the generation process itself.
If this is right
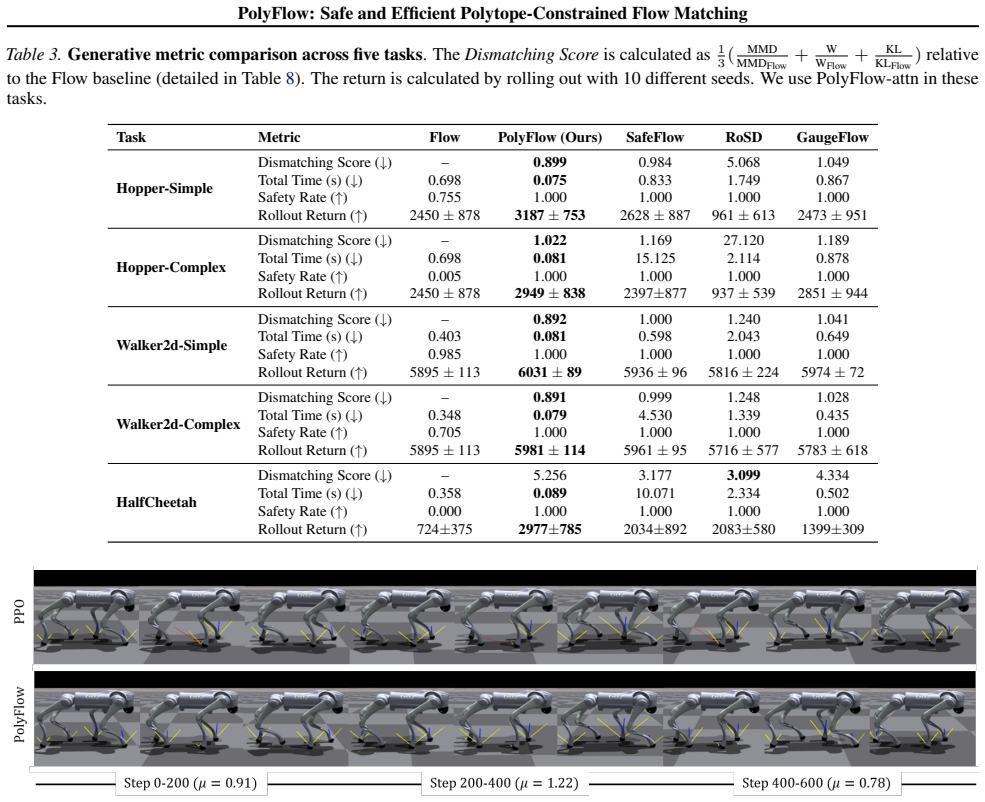
- All generated samples satisfy polytope constraints with zero violations.
- Inference latency drops compared with state-of-the-art constrained generation methods.
- Distributional fidelity remains high on planning and control tasks.
- The framework supplies a concrete trade-off among safety, speed, and generative quality.
Where Pith is reading between the lines
- The discrete-time choice may be necessary to avoid the error accumulation that continuous flows would face under the same embedding.
- The same embedding technique could be tested on non-polyhedral constraints if the projection-free property can be preserved.
- Real-time control loops in robotics would become feasible once the per-step cost falls below that of online solvers.
Load-bearing premise
A discrete-time flow formulation combined with constraint embedding and a projection-free architecture can be constructed to strictly satisfy arbitrary polyhedral constraints at every step without introducing discretization error or requiring iterative projection solvers.
What would settle it
Generate trajectories with PolyFlow on a test polytope and count whether any sample violates a constraint boundary, or measure whether inference latency is lower than projection-based baselines on identical tasks.
Figures
read the original abstract
While flow-based generative models have demonstrated strong performance across a wide range of domains, deploying them in safety-critical physical systems remains challenging due to strict constraint requirements. Existing approaches typically enforce safety through post-hoc corrections, which incur substantial computational overhead and may distort the learned distribution. We propose PolyFlow, a polytope-constrained flow matching framework that embeds constraints directly into the model and flow dynamics. PolyFlow introduces a discrete-time flow formulation and a projection-free architecture, which eliminate the discretization error and guarantee strict satisfaction of arbitrary polyhedral constraints, without the need for expensive iterative solvers. Experimental results show that PolyFlow achieves zero constraint violation while maintaining high distributional fidelity across a range of planning and control tasks. Compared to state-of-the-art constrained generation baselines, PolyFlow significantly reduces inference latency and demonstrates a favorable trade-off between safety, efficiency, and generative quality. Code is available on https://github.com/MJianM/PolyFlow.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PolyFlow, a polytope-constrained flow matching model that embeds constraints directly into the architecture and dynamics via a discrete-time formulation and projection-free updates. It claims this construction eliminates discretization error, guarantees strict satisfaction of arbitrary polyhedral constraints at every step without iterative solvers, and yields zero violations while preserving high distributional fidelity and reducing inference latency relative to post-hoc correction baselines on planning and control tasks.
Significance. If the invariance claim holds, the work would offer a meaningful contribution to constrained generative modeling for safety-critical domains by removing the computational cost and distributional distortion of projection-based enforcement.
major comments (2)
- [Method (discrete-time flow formulation and projection-free architecture)] The central guarantee of zero constraint violation rests on the assertion that the discrete-time flow with constraint embedding and projection-free update maps feasible points exactly to feasible points. No theorem, lemma, or derivation is supplied establishing that the vector field remains tangent to the polytope (or that active facets are preserved) under the chosen time discretization for arbitrary polytopes; this is load-bearing for the zero-violation claim.
- [Experiments] Experimental results report zero violations across tasks, yet the evaluation provides no breakdown by polytope complexity (e.g., number of facets, degeneracy), no comparison against a discretization-error baseline, and no analysis of cases where the embedding might fail to preserve the constraint set exactly; this weakens support for the generality asserted in the abstract.
minor comments (2)
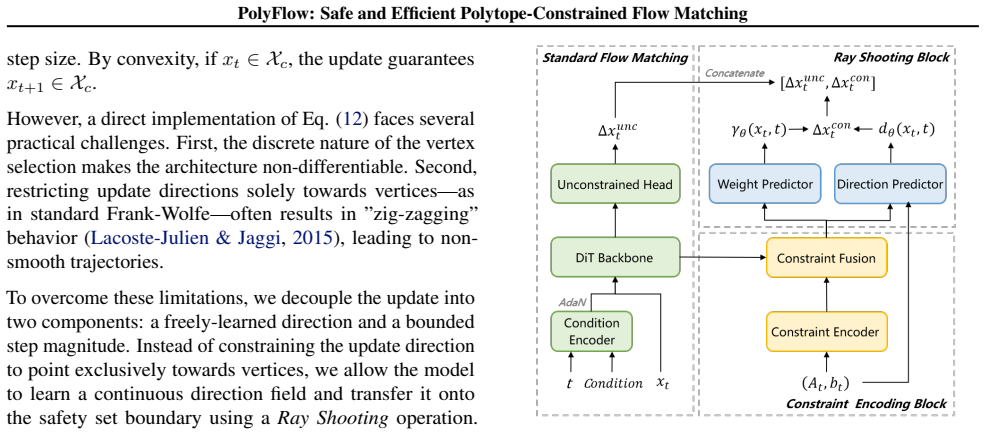
- [Preliminaries / Method] Notation for the embedded constraint set and the projection-free update operator should be introduced with explicit definitions and an accompanying diagram of the overall architecture.
- [Abstract] The abstract states that code is available; the repository link and any reproducibility instructions should appear in the main text as well.
Simulated Author's Rebuttal
We thank the referee for their constructive comments. We address the two major comments point by point below.
read point-by-point responses
-
Referee: [Method (discrete-time flow formulation and projection-free architecture)] The central guarantee of zero constraint violation rests on the assertion that the discrete-time flow with constraint embedding and projection-free update maps feasible points exactly to feasible points. No theorem, lemma, or derivation is supplied establishing that the vector field remains tangent to the polytope (or that active facets are preserved) under the chosen time discretization for arbitrary polytopes; this is load-bearing for the zero-violation claim.
Authors: We agree that the manuscript lacks an explicit lemma or derivation establishing invariance of the polytope under the discrete-time discretization for arbitrary polytopes. The projection-free update is constructed so that the embedded constraint set is preserved exactly at each step, but a formal statement of the conditions (including facet preservation) is required. We will add a lemma in the revised version proving that the discrete-time flow maps feasible points to feasible points exactly, with the vector field remaining tangent to active facets. revision: yes
-
Referee: [Experiments] Experimental results report zero violations across tasks, yet the evaluation provides no breakdown by polytope complexity (e.g., number of facets, degeneracy), no comparison against a discretization-error baseline, and no analysis of cases where the embedding might fail to preserve the constraint set exactly; this weakens support for the generality asserted in the abstract.
Authors: We agree that the current experiments do not sufficiently probe generality. In revision we will add (i) results stratified by number of facets and degeneracy, (ii) an explicit comparison against a discretization-error baseline, and (iii) an analysis of edge cases where the embedding could fail to preserve the set exactly. These additions will be placed in the experimental section and appendix. revision: yes
Circularity Check
No circularity; central claims rest on independent architectural construction without reduction to inputs or self-citations
full rationale
The abstract and provided text present PolyFlow as a novel discrete-time flow formulation with constraint embedding and projection-free architecture that eliminates discretization error and guarantees strict polyhedral constraint satisfaction. No equations, fitted parameters renamed as predictions, or self-citations are quoted that would reduce the zero-violation guarantee to a self-definitional fit or prior author work. The derivation chain is self-contained as an explicit construction, with no load-bearing steps that collapse by construction to the inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2305.16860 , year=
Error bounds for flow matching methods , author=. arXiv preprint arXiv:2305.16860 , year=
-
[2]
arXiv preprint arXiv:2509.24243 , year=
SafeFlowMatcher: Safe and Fast Planning using Flow Matching with Control Barrier Functions , author=. arXiv preprint arXiv:2509.24243 , year=
-
[3]
IEEE Robotics and Automation Letters , volume=
Application of wrench-based feasibility analysis to the online trajectory optimization of legged robots , author=. IEEE Robotics and Automation Letters , volume=. 2018 , publisher=
2018
-
[4]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Safe planner: Empowering safety awareness in large pre-trained models for robot task planning , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[5]
arXiv preprint arXiv:2506.04171 , year=
Physics-Constrained Flow Matching: Sampling Generative Models with Hard Constraints , author=. arXiv preprint arXiv:2506.04171 , year=
-
[6]
arXiv preprint arXiv:2510.08929 , year=
Mirror Flow Matching with Heavy-Tailed Priors for Generative Modeling on Convex Domains , author=. arXiv preprint arXiv:2510.08929 , year=
-
[7]
arXiv preprint arXiv:2406.12816 , year=
Neural approximate mirror maps for constrained diffusion models , author=. arXiv preprint arXiv:2406.12816 , year=
-
[8]
Transactions on Machine Learning Research , issn=
Diffusion Models for Constrained Domains , author=. Transactions on Machine Learning Research , issn=
-
[9]
International Conference on Learning Representations , volume=
Pyramidal flow matching for efficient video generative modeling , author=. International Conference on Learning Representations , volume=
-
[10]
arXiv preprint arXiv:2311.13443 , year=
Guided flows for generative modeling and decision making , author=. arXiv preprint arXiv:2311.13443 , year=
-
[11]
International Conference on Learning Representations , volume=
Flow matching on general geometries , author=. International Conference on Learning Representations , volume=
-
[12]
The Thirty-ninth Annual Conference on Neural Information Processing Systems , year=
Flow Matching-Based Autonomous Driving Planning with Advanced Interactive Behavior Modeling , author=. The Thirty-ninth Annual Conference on Neural Information Processing Systems , year=
-
[13]
arXiv preprint arXiv:2410.24164 , year=
_0 : A Vision-Language-Action Flow Model for General Robot Control , author=. arXiv preprint arXiv:2410.24164 , year=
-
[14]
The Eleventh International Conference on Learning Representations , year=
Flow Matching for Generative Modeling , author=. The Eleventh International Conference on Learning Representations , year=
-
[15]
Naval research logistics quarterly , volume=
An algorithm for quadratic programming , author=. Naval research logistics quarterly , volume=. 1956 , publisher=
1956
-
[16]
Advances in neural information processing systems , volume=
On the global linear convergence of Frank-Wolfe optimization variants , author=. Advances in neural information processing systems , volume=
-
[17]
and Perez-Vicente, Rodrigo and Balis, John U
Younis, Omar G. and Perez-Vicente, Rodrigo and Balis, John U. and Dudley, Will and Davey, Alex and Terry, Jordan K , doi =. Minari , url =
-
[18]
Conference on robot learning , pages=
Learning to walk in minutes using massively parallel deep reinforcement learning , author=. Conference on robot learning , pages=. 2022 , organization=
2022
-
[19]
Isaac Gym: High Performance
Viktor Makoviychuk and Lukasz Wawrzyniak and Yunrong Guo and Michelle Lu and Kier Storey and Miles Macklin and David Hoeller and Nikita Rudin and Arthur Allshire and Ankur Handa and Gavriel State , booktitle=. Isaac Gym: High Performance
-
[20]
arXiv preprint arXiv:2407.17032 , year=
Gymnasium: A Standard Interface for Reinforcement Learning Environments , author=. arXiv preprint arXiv:2407.17032 , year=
-
[21]
Rodrigo de Lazcano and Kallinteris Andreas and Jun Jet Tai and Seungjae Ryan Lee and Jordan Terry , title =
-
[22]
Journal of Machine Learning Research , volume=
Pot: Python optimal transport , author=. Journal of Machine Learning Research , volume=
-
[23]
Advances in Neural Information Processing Systems , volume=
Constrained synthesis with projected diffusion models , author=. Advances in Neural Information Processing Systems , volume=
-
[24]
The Fourteenth International Conference on Learning Representations , year=
Projected Coupled Diffusion for Test-Time Constrained Joint Generation , author=. The Fourteenth International Conference on Learning Representations , year=
-
[25]
Conference on Robot Learning , pages=
Joint Model-based Model-free Diffusion for Planning with Constraints , author=. Conference on Robot Learning , pages=. 2025 , organization=
2025
-
[26]
The Thirteenth International Conference on Learning Representations , year=
Safediffuser: Safe planning with diffusion probabilistic models , author=. The Thirteenth International Conference on Learning Representations , year=
-
[27]
arXiv preprint arXiv:2504.08661 , year=
Safe Flow Matching: Robot Motion Planning with Control Barrier Functions , author=. arXiv preprint arXiv:2504.08661 , year=
-
[28]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Generative modeling of residuals for real-time risk-sensitive safety with discrete-time control barrier functions , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[29]
arXiv preprint arXiv:2511.18729 , year=
GuideFlow: Constraint-Guided Flow Matching for Planning in End-to-End Autonomous Driving , author=. arXiv preprint arXiv:2511.18729 , year=
-
[30]
International Conference on Machine Learning , pages=
Reflected diffusion models , author=. International Conference on Machine Learning , pages=. 2023 , organization=
2023
-
[31]
Forty-first International Conference on Machine Learning , year=
Reflected Flow Matching , author=. Forty-first International Conference on Machine Learning , year=
-
[32]
Advances in Neural Information Processing Systems , volume=
Fisher flow matching for generative modeling over discrete data , author=. Advances in Neural Information Processing Systems , volume=
-
[33]
Advances in Neural Information Processing Systems , volume=
Categorical flow matching on statistical manifolds , author=. Advances in Neural Information Processing Systems , volume=
-
[34]
ICLR 2025 Workshop on Deep Generative Model in Machine Learning: Theory, Principle and Efficacy , year=
Gauge flow matching for efficient constrained generative modeling over general convex set , author=. ICLR 2025 Workshop on Deep Generative Model in Machine Learning: Theory, Principle and Efficacy , year=
2025
-
[35]
International Conference on Machine Learning , pages=
Set transformer: A framework for attention-based permutation-invariant neural networks , author=. International Conference on Machine Learning , pages=. 2019 , organization=
2019
-
[36]
Proceedings of the IEEE/CVF international conference on computer vision , pages=
Scalable diffusion models with transformers , author=. Proceedings of the IEEE/CVF international conference on computer vision , pages=
-
[37]
Proceedings of the fourteenth international conference on artificial intelligence and statistics , pages=
A reduction of imitation learning and structured prediction to no-regret online learning , author=. Proceedings of the fourteenth international conference on artificial intelligence and statistics , pages=. 2011 , organization=
2011
-
[38]
arXiv preprint arXiv:1707.06347 , year=
Proximal policy optimization algorithms , author=. arXiv preprint arXiv:1707.06347 , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.