An integrated interpretable control effectiveness learning and nonlinear control allocation methodology for overactuated aircrafts
Pith reviewed 2026-06-27 05:27 UTC · model grok-4.3
The pith
A compact analytical model learned from flight data via SINDy replaces high-fidelity onboard models for nonlinear control allocation in overactuated aircraft.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
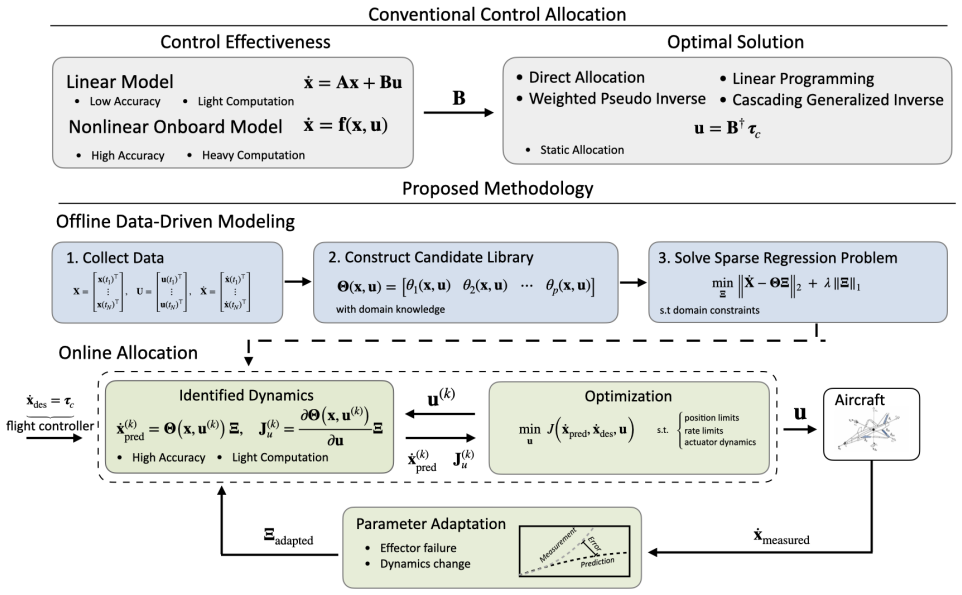
The authors claim that learning an explicit physics-constrained analytical model of the control effectiveness mapping from flight data using Sparse Identification of Nonlinear Dynamics yields a compact and interpretable representation that admits analytical derivatives, enabling efficient nonlinear control allocation that incorporates actuator dynamics without requiring an onboard model, while an online adaptation mechanism provides graceful reconfiguration under failures and achieves accuracy comparable to a full nonlinear onboard model at substantially reduced computational cost.
What carries the argument
Sparse Identification of Nonlinear Dynamics applied to the control effectiveness mapping, producing a sparse analytical expression that supports nonlinear optimization and online residual-based updates.
If this is right
- Nonlinear solvers can include actuator dynamics directly because analytical derivatives are available.
- No pre-existing high-fidelity onboard model is required for the allocation process.
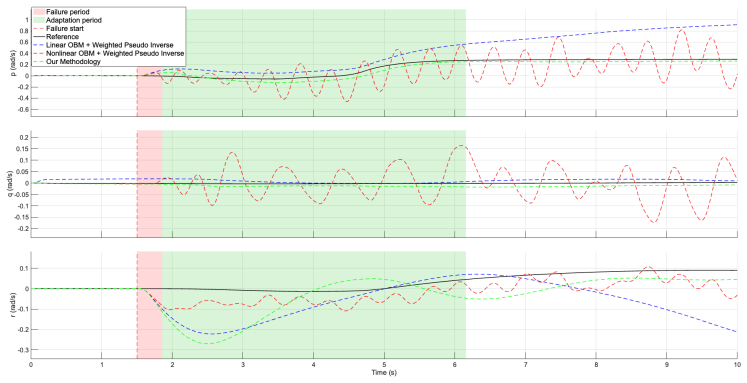
- Residual monitoring triggers model refresh, enabling graceful reconfiguration after actuator failures.
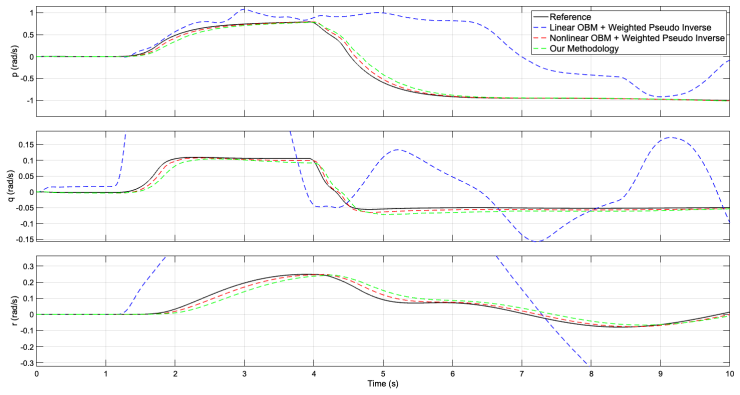
- Accuracy remains comparable to a full nonlinear model on a high-fidelity benchmark across aggressive maneuvers.
- Computational cost is substantially lower than established baselines that rely on full nonlinear models.
Where Pith is reading between the lines
- The same data-driven identification approach could extend to other overactuated vehicles such as spacecraft or marine craft.
- Explicit analytical models may simplify certification and fault diagnosis relative to black-box alternatives.
- The allocator module could be swapped into existing linear flight control architectures for incremental testing.
Load-bearing premise
Representative flight data collected under nominal conditions suffices for the identified model to remain accurate across the full flight envelope and after actuator failures or operating condition changes.
What would settle it
A simulation or flight test in which allocation errors from the adapted SINDy model exceed those produced by a full nonlinear onboard model during an actuator failure in an aggressive maneuver would falsify the accuracy and adaptation claims.
Figures

read the original abstract
Nonlinear dynamics and the strong couplings that arise between multiple effectors undermine the assumptions behind conventional, linear control allocation techniques. When flight enters regimes where nonlinear effects dominate, linear allocators exhibit reduced accuracy due to increased model mismatch, which subsequently degrades performance and robustness of the flight control system. High fidelity onboard models and black box data driven approaches can recover accuracy across the flight envelope, but respectively impose computational burdens prohibitive for real time allocation and sacrifice the interpretability required for verification and fault diagnosis. This paper addresses these limitations by learning an explicit, physics constrained analytical model of the control effectiveness mapping from representative flight data using Sparse Identification of Nonlinear Dynamics. The resulting mapping is compact, interpretable, and admits analytical derivatives, enabling efficient computation within nonlinear solvers that additionally incorporate actuator dynamics, without requiring an onboard model. An online adaptation mechanism monitors prediction residuals and refreshes the model when significant plant changes are detected, providing graceful reconfiguration under actuator failures and varying operating conditions. The methodology is evaluated on a high fidelity nonlinear benchmark aircraft across a range of aggressive maneuvers, achieving accuracy comparable to a full nonlinear onboard model while substantially reducing computational cost relative to established baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes learning an explicit, physics-constrained analytical model of the control effectiveness mapping for overactuated aircraft using Sparse Identification of Nonlinear Dynamics (SINDy) from representative flight data. This model is integrated into a nonlinear control allocation scheme that incorporates actuator dynamics, without needing an onboard model. An online adaptation mechanism is introduced to detect and adapt to plant changes such as actuator failures. The method is evaluated on a high-fidelity nonlinear benchmark aircraft across aggressive maneuvers, with claims of achieving accuracy comparable to full nonlinear onboard models while substantially reducing computational cost compared to baselines.
Significance. If the results hold, the work provides a valuable middle ground between high-fidelity but computationally expensive onboard models and black-box data-driven approaches by offering compact, interpretable models with analytical derivatives suitable for nonlinear optimization. This could enable more efficient real-time nonlinear control allocation and improved fault diagnosis in overactuated aircraft systems. The integration of online adaptation for reconfiguration is a practical strength.
major comments (2)
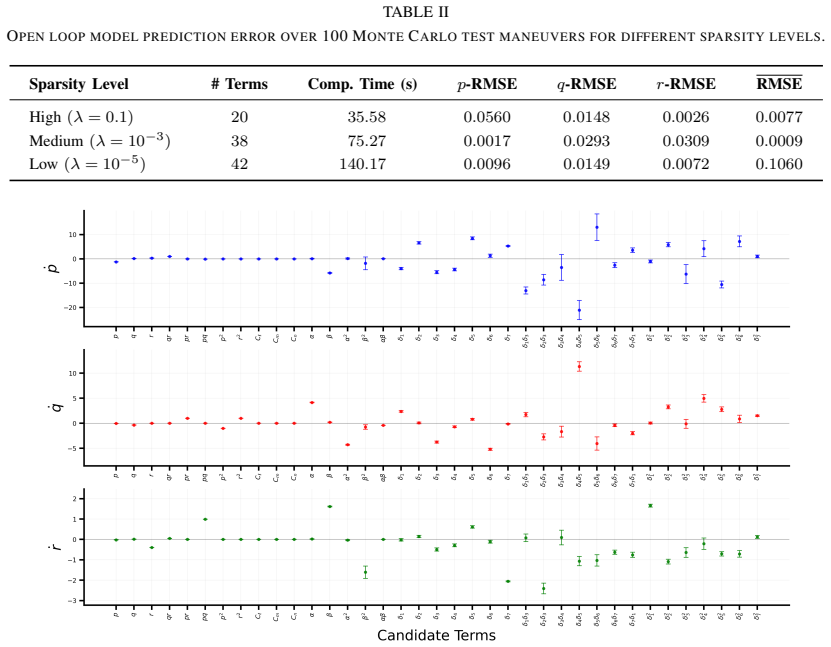
- [Abstract] Abstract: The central claim that the methodology achieves 'accuracy comparable to a full nonlinear onboard model while substantially reducing computational cost relative to established baselines' is presented without any quantitative metrics, error bars, specific comparison baselines, or data exclusion rules; this directly undermines the ability to assess the soundness of the performance claims.
- [Abstract (paragraph on online adaptation mechanism)] Abstract (paragraph on online adaptation mechanism): The assumption that SINDy models fitted to nominal flight data, with residual-triggered re-identification, will remain accurate across the flight envelope and under actuator failures lacks supporting details on data excitation, validity of the candidate library post-failure, and stability of the adaptation process; this is the least secure link for the generalization claim.
minor comments (1)
- [Title] The title uses 'aircrafts' which should be corrected to 'aircraft'.
Simulated Author's Rebuttal
Thank you for the constructive feedback. We address each major comment below and will revise the manuscript accordingly to strengthen the abstract's claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the methodology achieves 'accuracy comparable to a full nonlinear onboard model while substantially reducing computational cost relative to established baselines' is presented without any quantitative metrics, error bars, specific comparison baselines, or data exclusion rules; this directly undermines the ability to assess the soundness of the performance claims.
Authors: We agree that the abstract would benefit from quantitative support. The full manuscript (Sections IV and V) reports specific metrics including mean squared errors, computational runtimes, and comparisons to the listed baselines with the data exclusion criteria used. We will revise the abstract to include key quantitative results (e.g., error values and runtime reductions) to substantiate the claim. revision: yes
-
Referee: [Abstract (paragraph on online adaptation mechanism)] Abstract (paragraph on online adaptation mechanism): The assumption that SINDy models fitted to nominal flight data, with residual-triggered re-identification, will remain accurate across the flight envelope and under actuator failures lacks supporting details on data excitation, validity of the candidate library post-failure, and stability of the adaptation process; this is the least secure link for the generalization claim.
Authors: Details on data excitation, candidate library validity under failures, and adaptation stability (including residual triggering and reconfiguration results) are provided in Sections III.C and IV.B. We will revise the abstract paragraph to briefly reference these validation conditions and scenarios to better support the generalization claim. revision: yes
Circularity Check
No circularity: SINDy application to flight data is independent of target accuracy claims
full rationale
The paper applies the established SINDy sparse regression algorithm to representative flight data to obtain an explicit control-effectiveness mapping, then uses the resulting analytical form inside a nonlinear allocator with online residual monitoring. No equation or claim reduces the learned mapping or its claimed accuracy to a quantity defined in terms of itself or to a self-citation chain; the validation is performed against an external high-fidelity nonlinear benchmark model on aggressive maneuvers. The physics-constrained aspect is stated as part of the SINDy library choice but does not create a definitional loop. This is a standard data-driven identification workflow whose generalization properties are falsifiable outside the fitted parameters.
Axiom & Free-Parameter Ledger
free parameters (1)
- SINDy sparsity threshold
axioms (1)
- domain assumption Control effectiveness mapping can be expressed as a sparse polynomial or nonlinear function of states and inputs
Reference graph
Works this paper leans on
-
[1]
A review on recent development of spacecraft attitude fault tolerant control system,
S. Yin, B. Xiao, S. X. Ding, and D. Zhou, “A review on recent development of spacecraft attitude fault tolerant control system,”IEEE Transactions on Industrial Electronics, vol. 63, no. 5, pp. 3311–3320, 2016
2016
-
[2]
A survey of control allocation meth- ods for ships and underwater vehicles,
T. I. Fossen and T. A. Johansen, “A survey of control allocation meth- ods for ships and underwater vehicles,” in2006 14th Mediterranean Conference on Control and Automation, 2006, pp. 1–6. TABLE VII EXECUTION TIME COMPARISON OF CONTROL ALLOCATION APPROACHES. Method Model Eval. (s) Solver (s) Total (s) Our Methodology (with gradient descent) – –0.161 Nonl...
2006
-
[3]
A new method for control allocation of aircraft flight control system,
Y . Yang and Z. Gao, “A new method for control allocation of aircraft flight control system,”IEEE Transactions on Automatic Control, vol. 65, no. 4, pp. 1413–1428, 2019
2019
-
[4]
Durham, K
W. Durham, K. A. Bordignon, and R. Beck,Aircraft control allocation. John Wiley & Sons, 2017
2017
-
[5]
Control allocation—a survey,
T. A. Johansen and T. I. Fossen, “Control allocation—a survey,” Automatica, vol. 49, no. 5, pp. 1087–1103, 2013
2013
-
[6]
Control allocation for over-actuated systems,
M. W. Oppenheimer, D. B. Doman, and M. A. Bolender, “Control allocation for over-actuated systems,” in2006 14th Mediterranean Conference on Control and Automation. IEEE, 2006, pp. 1–6
2006
-
[7]
Lyapunov stability analysis of daisy chain control allocation,
J. M. Buffington and D. F. Enns, “Lyapunov stability analysis of daisy chain control allocation,”Journal of Guidance, Control, and Dynamics, vol. 19, no. 6, pp. 1226–1230, 1996
1996
-
[8]
Cascaded nonlinear dy- namic inversion applied to a fixed-wing distributed electric propulsion aircraft,
J. S. Soikkeli, D. Matko, and T. Koopman, “Cascaded nonlinear dy- namic inversion applied to a fixed-wing distributed electric propulsion aircraft,” inAIAA AVIATION 2023 Forum, 2023, p. 4048
2023
-
[9]
Development of an artificial neural network control allocation algorithm for small tailless aircraft based on dy- namic allocation method,
J. Kang and K. Choi, “Development of an artificial neural network control allocation algorithm for small tailless aircraft based on dy- namic allocation method,”International Journal of Aeronautical and Space Sciences, vol. 23, no. 2, pp. 363–378, 2022
2022
-
[10]
Aerodynamic effects compensation on multi- rotor uavs based on a neural network control allocation approach,
S. P. Madruga, A. H. Tavares, S. O. Luiz, T. P. do Nascimento, and A. M. N. Lima, “Aerodynamic effects compensation on multi- rotor uavs based on a neural network control allocation approach,” IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 2, pp. 295–312, 2021
2021
-
[11]
Constrained control allocation for overactuated aircraft using a neurodynamic model,
M. Chen, “Constrained control allocation for overactuated aircraft using a neurodynamic model,”IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 46, no. 12, pp. 1630–1641, 2015
2015
-
[12]
Reinforcement learning-based control allocation for the innovative control effectors aircraft,
P. S. de Vries and E.-J. Van Kampen, “Reinforcement learning-based control allocation for the innovative control effectors aircraft,” inAIAA Scitech 2019 Forum, 2019, p. 0144
2019
-
[13]
Discovering governing equations from data by sparse identification of nonlinear dynamical systems,
S. L. Brunton, J. L. Proctor, and J. N. Kutz, “Discovering governing equations from data by sparse identification of nonlinear dynamical systems,”Proceedings of the national academy of sciences, vol. 113, no. 15, pp. 3932–3937, 2016
2016
-
[14]
Sparse identifica- tion of nonlinear dynamics with low-dimensionalized flow represen- tations,
K. Fukami, T. Murata, K. Zhang, and K. Fukagata, “Sparse identifica- tion of nonlinear dynamics with low-dimensionalized flow represen- tations,”Journal of Fluid Mechanics, vol. 926, p. A10, 2021
2021
-
[15]
Data-based modeling and control of the nonlinear aircraft system using extended implicit sparse identification,
Y . Liu, H. Hong, P. Piprek, P. Chud`y, and S. Hu, “Data-based modeling and control of the nonlinear aircraft system using extended implicit sparse identification,”IEEE Transactions on Aerospace and Electronic Systems, 2025
2025
-
[16]
Data-driven discovery of the quadrotor equations of motion via sparse identification of nonlinear dynamics,
Z. M. Manaa, M. R. Elbalshy, and A. M. Abdallah, “Data-driven discovery of the quadrotor equations of motion via sparse identification of nonlinear dynamics,” inAIAA SCITECH 2024 Forum, 2024, p. 1308
2024
-
[17]
Discovering interpretable dynamics by sparsity promotion on energy and the lagrangian,
H. K. Chu and M. Hayashibe, “Discovering interpretable dynamics by sparsity promotion on energy and the lagrangian,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2154–2160, 2020
2020
-
[18]
Sindy analysis of disturbance and plant model superposition on a rolling delta wing,
M. Le Provost, D. R. Williams, and S. Brunton, “Sindy analysis of disturbance and plant model superposition on a rolling delta wing,” in 2018 Flow control conference, 2018, p. 3068
2018
-
[19]
Nonlinear multivariate spline-based control allocation for high-performance air- craft,
H. Tol, C. C. de Visser, E. Van Kampen, and Q. Chu, “Nonlinear multivariate spline-based control allocation for high-performance air- craft,”Journal of Guidance, Control, and Dynamics, vol. 37, no. 6, pp. 1840–1862, 2014
2014
-
[20]
ADMIRE: The aero-data model in a research environment version 4.0, model description,
L. Forssell and U. Nilsson, “ADMIRE: The aero-data model in a research environment version 4.0, model description,” FOI - Swedish Defence Research Agency, Tech. Rep., December 2005
2005
-
[21]
A unified sparse optimization framework to learn parsimo- nious physics-informed models from data,
K. Champion, P. Zheng, A. Y . Aravkin, S. L. Brunton, and J. N. Kutz, “A unified sparse optimization framework to learn parsimo- nious physics-informed models from data,”IEEE Access, vol. 8, pp. 169 259–169 271, 2020
2020
-
[22]
Pysindy: A python package for the sparse identification of nonlinear dynamical systems from data,
B. de Silva, K. Champion, M. Quade, J.-C. Loiseau, J. Kutz, and S. Brunton, “Pysindy: A python package for the sparse identification of nonlinear dynamical systems from data,”Journal of Open Source Software, vol. 5, no. 49, p. 2104, 2020. [Online]. Available: https://doi.org/10.21105/joss.02104
-
[23]
Data-based modeling and control of the nonlinear aircraft system using extended implicit sparse identification,
Y . Liu, H. Hong, P. Piprek, P. Chud´y, and S. Hu, “Data-based modeling and control of the nonlinear aircraft system using extended implicit sparse identification,”IEEE Transactions on Aerospace and Electronic Systems, vol. 61, no. 3, pp. 6928–6940, 2025
2025
-
[24]
B. L. Stevens, F. L. Lewis, and E. N. Johnson,Aircraft control and simulation: dynamics, controls design, and autonomous systems. John Wiley & Sons, 2015
2015
-
[25]
Dynamic control allocation using constrained quadratic programming,
O. H ¨arkeg˚ard, “Dynamic control allocation using constrained quadratic programming,”Journal of Guidance, Control, and Dynamics, vol. 27, no. 6, pp. 1028–1034, 2004
2004
-
[26]
Model predictive dynamic control allocation with actuator dynamics,
Y . Luo, A. Serrani, S. Yurkovich, D. B. Doman, and M. W. Oppen- heimer, “Model predictive dynamic control allocation with actuator dynamics,” inProceedings of the 2004 American control conference, vol. 2. IEEE, 2004, pp. 1695–1700
2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.