Discrete Autoregressive Transformer for Generative Mechanism Synthesis
Pith reviewed 2026-06-27 02:02 UTC · model grok-4.3
The pith
A conditional autoregressive transformer generates diverse mechanism families for prescribed paths using VAE latent conditioning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
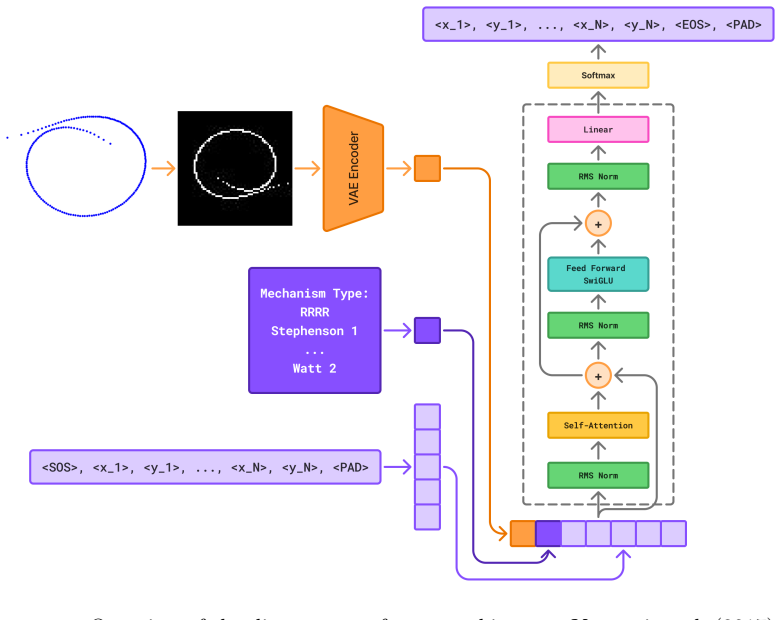
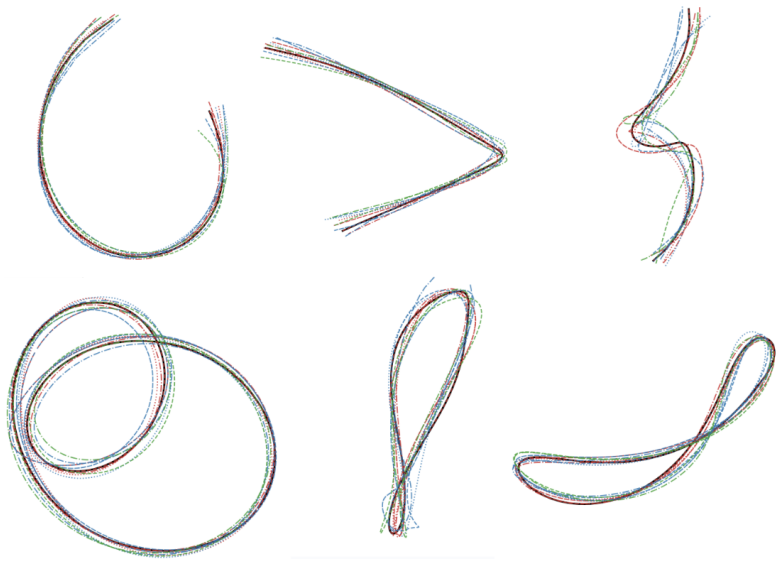
We formulate synthesis as conditional autoregressive sequence modeling: joint coordinates are uniformly quantized to tokens and generated by a decoder-only transformer with a variational-autoencoder (VAE) latent of the target curve and an explicit mechanism-type token. Training combines token cross-entropy with a Gaussian-smoothed bin auxiliary loss that respects ordinal structure among bins. At inference, a bounded latent-noise schedule decodes all mechanism types at each noise level; we retain the top five candidates by geometric error, yielding diverse accurate families without dataset lookup. On held-out tests, aggregate mean Chamfer distance is 0.0132 and mean dynamic time warping is 0.
What carries the argument
Conditional autoregressive decoder-only transformer that receives a VAE latent of the target curve and a mechanism-type token to generate quantized joint coordinates.
If this is right
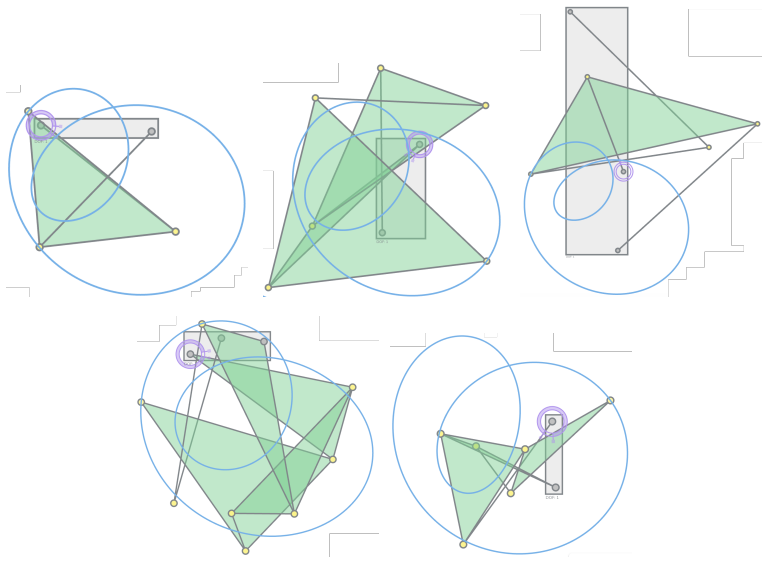
- The model produces mechanisms belonging to four-, six-, and eight-bar families for any given target path.
- Generated mechanisms achieve low geometric error on curves absent from the training set.
- Varying the latent noise level during decoding supplies multiple distinct candidates per target.
- The auxiliary ordinal loss enables the transformer to respect the numerical ordering of binned coordinate values.
Where Pith is reading between the lines
- The VAE latent representation could support interpolation between nearby target curves to produce families of related mechanisms.
- The same tokenization and conditioning scheme might transfer to other inverse geometric design tasks such as frame or truss layout.
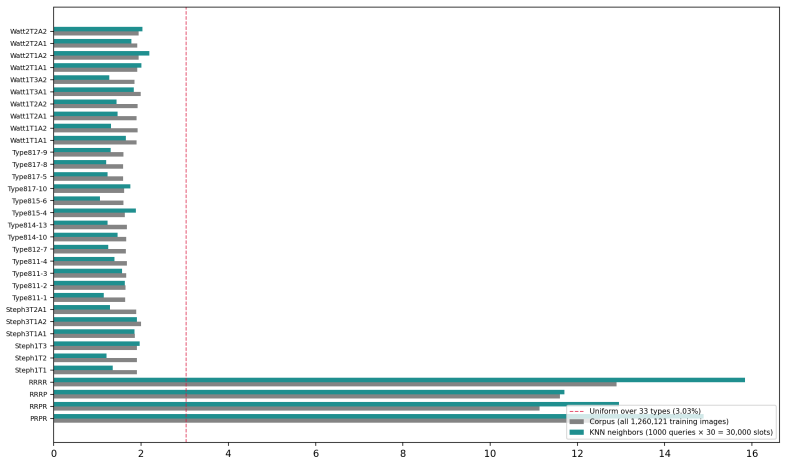
- The performance gap relative to the latent k-nearest-neighbor baseline indicates the transformer learns a mapping rather than performing retrieval.
Load-bearing premise
The variational autoencoder latent space learned from the corpus of one million mechanisms supplies a sufficiently general conditioning signal for accurate synthesis on arbitrary unseen target curves.
What would settle it
A collection of target curves whose VAE encodings lie far outside the training distribution, for which the generated mechanisms produce mean Chamfer distance above 0.05 after simulation.
Figures
read the original abstract
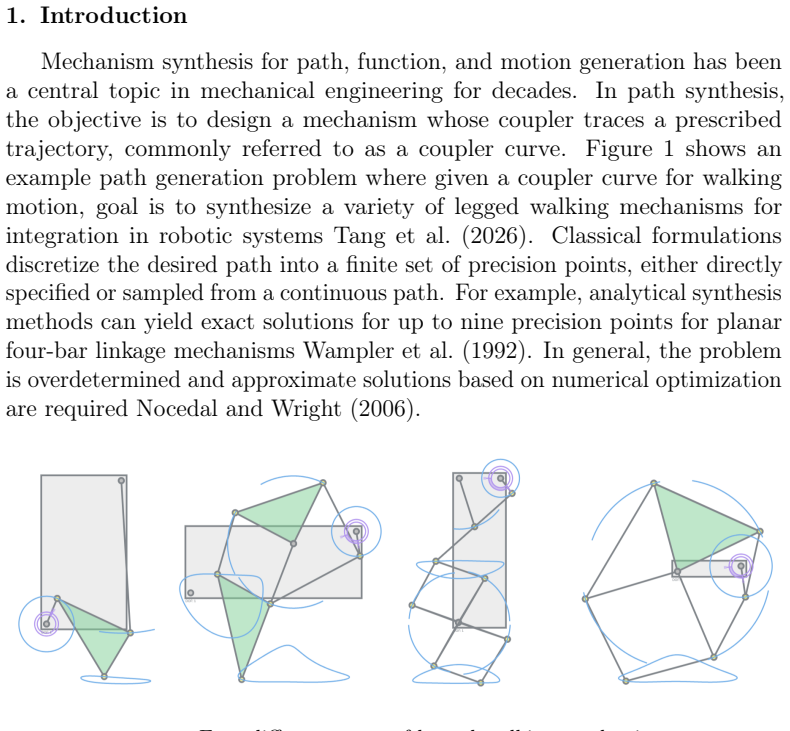
Planar path synthesis requires mechanisms whose coupler curves match a prescribed trajectory; the mapping from curve to linkage is inherently one-to-many across four-, six-, and eight-bar topologies. We address this design problem with simulation-grounded evaluation on a curated corpus of over one million mechanisms, reporting Chamfer distance and dynamic time warping after forward kinematics and geometric alignment. We formulate synthesis as conditional autoregressive sequence modeling: joint coordinates are uniformly quantized to tokens and generated by a decoder-only transformer with a variational-autoencoder (VAE) latent of the target curve and an explicit mechanism-type token. Training combines token cross-entropy with a Gaussian-smoothed bin auxiliary loss that respects ordinal structure among bins. At inference, a bounded latent-noise schedule decodes all mechanism types at each noise level; we retain the top five candidates by geometric error, yielding diverse accurate families without dataset lookup. On held-out tests, aggregate mean Chamfer distance is $0.0132$ and mean dynamic time warping is $0.153$; a latent $k$-nearest-neighbor baseline that conditions on training-set neighbor latents in VAE space achieves matched-topology mean Chamfer distance $0.0071$ and mean dynamic time warping $0.117$ using the same decoder.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript formulates planar path synthesis as conditional autoregressive sequence modeling over quantized joint coordinates. A decoder-only transformer is conditioned on a VAE latent of the target coupler curve plus an explicit mechanism-type token; training uses cross-entropy plus a Gaussian-smoothed bin auxiliary loss. On a corpus of >1 M mechanisms the model reports aggregate mean Chamfer distance 0.0132 and mean DTW 0.153 on held-out tests; a latent kNN baseline that substitutes nearest training-set latents into the same decoder obtains matched-topology Chamfer 0.0071 and DTW 0.117.
Significance. If the quantitative results hold under broader evaluation, the combination of large-scale curated mechanism data with discrete autoregressive modeling and VAE conditioning would constitute a concrete data-driven baseline for mechanism synthesis. The explicit reporting of geometric error after forward kinematics and the provision of a retrieval baseline are positive features; however, the in-distribution character of the held-out tests and the superior matched-topology numbers of the kNN baseline limit the immediate significance for out-of-distribution prescribed paths.
major comments (2)
- [Abstract] Abstract: the transformer reports aggregate mean Chamfer distance 0.0132 while the kNN baseline achieves 0.0071 on matched-topology cases using the identical decoder; this gap indicates that performance is driven primarily by proximity of the conditioning latent to the training distribution rather than by the autoregressive synthesis procedure itself.
- [Abstract] Abstract: held-out tests are drawn from the same one-million-mechanism corpus used for VAE and transformer training, so the reported Chamfer and DTW values demonstrate only in-distribution performance; the central claim that the VAE latent supplies a sufficiently informative conditioning signal for arbitrary prescribed paths therefore lacks a direct test.
minor comments (1)
- [Abstract] Abstract and methods: the quantization bin count, VAE latent dimension, and noise-schedule bounds are listed as free parameters but their concrete values and sensitivity analysis are not supplied, impeding reproducibility of the reported error metrics.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the transformer reports aggregate mean Chamfer distance 0.0132 while the kNN baseline achieves 0.0071 on matched-topology cases using the identical decoder; this gap indicates that performance is driven primarily by proximity of the conditioning latent to the training distribution rather than by the autoregressive synthesis procedure itself.
Authors: The kNN baseline substitutes the nearest training-set latent for the query latent before feeding the identical decoder; it therefore performs latent-space retrieval. Our transformer instead generates directly from the VAE encoding of the target curve with no training-set access at inference. The lower matched-topology error of kNN is expected under retrieval, while the transformer results reflect synthesis for latents that need not be nearest neighbors. The kNN numbers are reported expressly to provide this context. No revision is required. revision: no
-
Referee: [Abstract] Abstract: held-out tests are drawn from the same one-million-mechanism corpus used for VAE and transformer training, so the reported Chamfer and DTW values demonstrate only in-distribution performance; the central claim that the VAE latent supplies a sufficiently informative conditioning signal for arbitrary prescribed paths therefore lacks a direct test.
Authors: We agree that the reported metrics reflect in-distribution held-out performance from the same corpus. The manuscript does not present out-of-distribution experiments on arbitrary prescribed paths. We can add an explicit qualifier in the abstract and discussion to clarify the scope of the evaluation. revision: partial
Circularity Check
No circularity: metrics computed independently on held-out data via forward kinematics
full rationale
The paper trains a VAE on the mechanism corpus and an autoregressive transformer conditioned on VAE latents plus mechanism-type tokens. Generation produces joint-coordinate token sequences; evaluation computes Chamfer distance and DTW after explicit forward kinematics and alignment on held-out curves drawn from the same corpus. These geometric errors are external to the training losses (cross-entropy plus smoothed-bin auxiliary) and are not obtained by fitting parameters to the test set or by re-using training latents as the reported output. No equation reduces the reported aggregate scores (0.0132 Chamfer, 0.153 DTW) to quantities defined by the model inputs. The kNN baseline is presented separately and does not alter the independence of the primary evaluation. No self-citation chains, ansatzes smuggled via citation, or self-definitional steps appear in the provided derivation.
Axiom & Free-Parameter Ledger
free parameters (3)
- quantization bin count
- VAE latent dimension
- noise schedule bounds
axioms (2)
- domain assumption The VAE encoder produces a latent distribution that is sufficiently informative for downstream autoregressive generation of valid mechanisms.
- domain assumption Forward kinematics and geometric alignment produce comparable Chamfer and DTW distances across different mechanism topologies.
Reference graph
Works this paper leans on
-
[1]
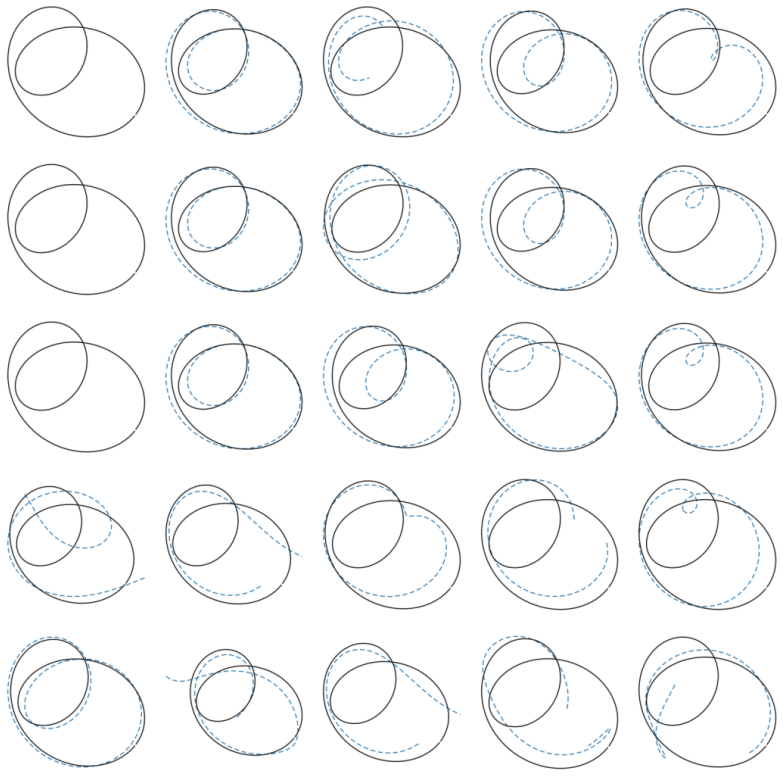
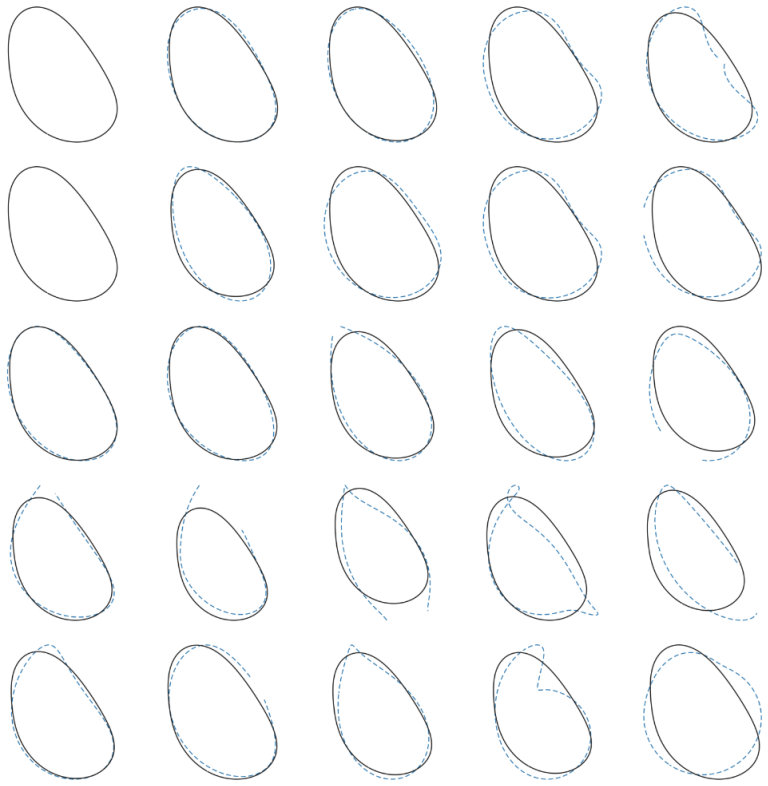
Path synthesis of four- bar mechanisms using synergy of polynomial neural network and stackel- 21 Figure 7: Top-10 predicted coupler curves for a single target trajectory. The black curve shows the ground-truth coupler curve, while colored dashed curves correspond to the ten best predicted mechanisms ranked by Chamfer Distance after geometric alignment. P...
arXiv 2016
-
[2]
Mechanism and Machine Theory 94, 177–187
Coupler-curve synthesis of four-bar linkages via a novel formulation. Mechanism and Machine Theory 94, 177–187. doi:10.1016/j.mechmachtheory.2015.08.010. Barrow, H.G., Tenenbaum, J.M., Hanson, A.R., Selfridge, P.J.,
-
[3]
Mechaformer: Sequence learning for kinematic mechanism design automation. arXiv preprint. URL: https://arxiv.org/abs/2508.09005,arXiv:2508.09005. do Carmo, M.P.,
-
[4]
Journal of Mechanical Design 145, 071704
GCP-HOLO: Generating high- order linkage graphs for path synthesis. Journal of Mechanical Design 145, 071704. doi:10.1115/1.4062147. Galan-Marin, G., Alonso, F.J., Del Castillo, J.M.,
-
[5]
Deep residual learning for image recognition, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 770–778. Higgins, I., Matthey, L., Pal, A., Burgess, C., Glorot, X., Botvinick, M., Mohamed, S., Lerchner, A., 2017.β-VAE: Learning basic visual concepts with a constrained variational framework, in: International Conference...
2017
-
[6]
Synthesis of mechanical linkages using artificial neural networks and optimization, in: IEEE International Conference on Neural Networks, pp. 822–J. doi:10.1109/ICNN.1993.298663. Kapsalyamov, A., Hussain, S., Brown, N.A., Goecke, R., Hayat, M., Jamwal, P.K.,
-
[7]
Engineering Applications of Artificial Intelligence 117, 105500
Synthesis of a six-bar mechanism for generating knee and ankle motion trajectories using deep generative neural net- work. Engineering Applications of Artificial Intelligence 117, 105500. doi:10.1016/j.engappai.2022.105500. Khan, N., Ullah, I., Al-Grafi, M.,
-
[8]
Mathematical Problems in Engineering 2017, 1–16
A parametrization-invariant fourier approach to planar linkage synthesis for path generation. Mathematical Problems in Engineering 2017, 1–16. doi:10.1155/2017/8458149. Loshchilov, I., Hutter, F.,
-
[9]
Path Synthesis of Crank-Rocker Mechanism Using Fourier Descriptors Based Neural Network. Springer Singapore. pp. 32–41. doi:10.1007/978-981-15-0142-5_4. Nobari, A.H., Srivastava, A., Gutfreund, D., Ahmed, F.,
-
[10]
Links: A dataset of a hundred million planar linkage mechanisms for data-driven kine- matic design, in: Proceedings of the ASME 2022 International Design Engi- neering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE2022), ASME. p. V03AT03A013. URL:https: //doi.org/10.1115/DETC2022-89798, doi:10.1115/DETC2022-89798. N...
-
[11]
Link: Learning joint representations of design and performance spaces through contrastive learning for mechanism synthesis. arXiv preprint. URL: https://arxiv.org/abs/2405.20592,arXiv:2405.20592. 24 Nocedal, J., Wright, S.J.,
-
[12]
Numerical Optimization. 2 ed., Springer, New York. Nurizada, A., Dhaipule, R., Lyu, Z., Purwar, A., 2025a. A dataset of 3m single-dof planar 4-, 6-, and 8-bar linkage mechanisms with open and closed coupler curves for machine learning-driven path synthesis. ASME Journal of Mechanical Design 147, 041702. URL:https://doi.org/10.1115/1. 4067014, doi:10.1115/...
-
[13]
Journal of Computing and Information Science in Engineering 24, 011008
An invariant representation of coupler curves using a variational autoencoder: Application to path synthesis of four-bar mechanisms. Journal of Computing and Information Science in Engineering 24, 011008. URL:https://doi.org/10.1115/1.4063726, doi:10.1115/1.4063726. van den Oord, A., Vinyals, O., Kavukcuoglu, K.,
-
[14]
arXiv preprint arXiv:1710.05941
Searching for activation functions. arXiv preprint arXiv:1710.05941 . Sakoe, H., Chiba, S.,
-
[15]
Dynamic programming algorithm optimization for spoken word recognition. IEEE Transactions on Acoustics, Speech, and Signal Processing 26, 43–49. doi:10.1109/TASSP.1978.1163055. Shannon, C.E.,
-
[16]
Touvron, H., Lavril, T., Izacard, G., et al.,
URL:https://www.mdpi.com/2075-1702/ 14/3/253. Touvron, H., Lavril, T., Izacard, G., et al.,
2075
-
[17]
LLaMA: Open and efficient foundation language modelsarXiv:2302.13971. Vasiliu, A., Yannou, B.,
-
[18]
Journal of Mechanical Design 114, 153–159
Complete real solution in(9 , 9)for nine-point path synthesis for four-bars. Journal of Mechanical Design 114, 153–159. doi:10.1115/1.2916908. Williams, R.J., Zipser, D.,
-
[19]
Mechanism and Machine Theory 163, 104375
Big data approach for the simultaneous determination of the topology and end-effector location of a planar linkage mechanism. Mechanism and Machine Theory 163, 104375. doi:10.1016/j.mechmachtheory.2021.104375. Yim, N.H., Ryu, J., Kim, Y.Y.,
-
[20]
Big data approach for synthesizing a spatial linkage mechanism, in: 2023 IEEE International Conference on Robotics and Automation (ICRA), pp. 7433–7439. doi:10.1109/ICRA48891. 2023.10161300. Zhang, B., Sennrich, R.,
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.