Root-Selecting Fixed-Point Inversion for Rectified Flows via Trajectory Straightness
Pith reviewed 2026-06-27 01:20 UTC · model grok-4.3
The pith
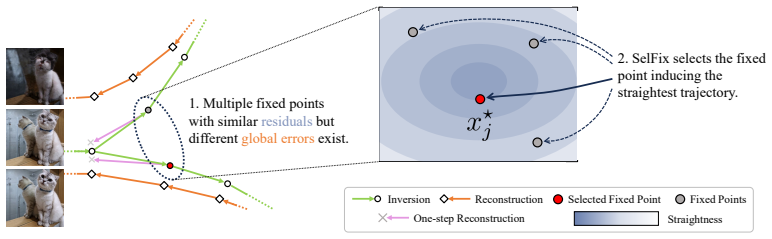
SelFix selects the fixed-point solution that produces the straightest inverse trajectory for rectified flows.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Fixed-point inversion for rectified flows admits multiple solutions at each step; among them, the solution inducing the straightest inverse trajectory yields stronger reconstruction and editing performance while still converging to an exact inverse root under standard local assumptions.
What carries the argument
SelFix, the per-step selection rule that picks the fixed-point solution maximizing straightness of the resulting inverse trajectory.
Load-bearing premise
That variation in reconstruction and editing quality across fixed-point solutions is closely associated with trajectory straightness, making straightness a reliable selection criterion.
What would settle it
An experiment in which the fixed-point solution with the straightest trajectory produces measurably worse reconstruction or editing quality than a less-straight solution on the same rectified-flow model.
Figures






read the original abstract
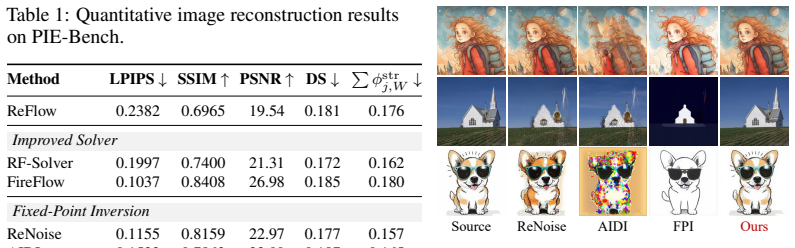
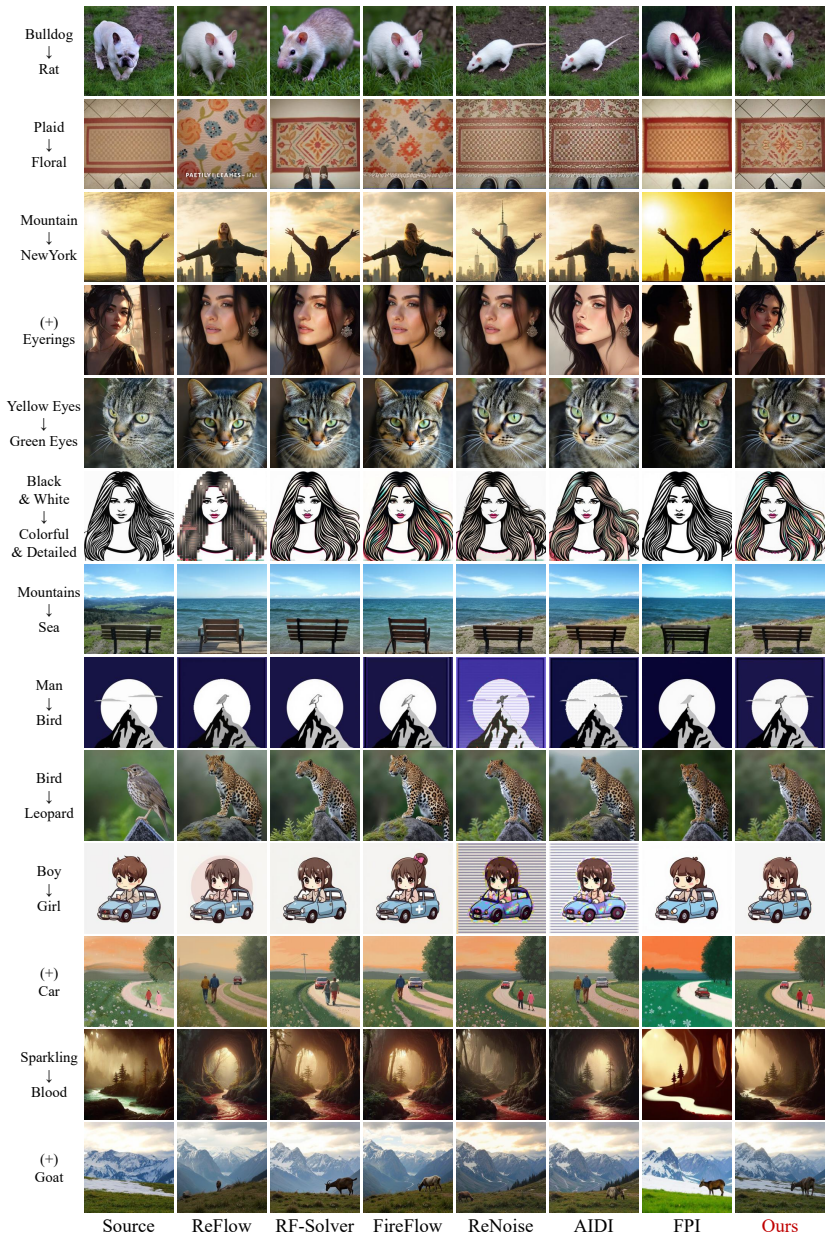
Finding the initial noise that generates a given data sample, known as inversion, is a key component for downstream applications such as training-free image editing. Existing fixed-point inversion methods improve inversion accuracy by formulating each inversion step as a fixed-point problem, but they lack a principled mechanism for selecting among multiple fixed-point solutions that can arise in practice. We observe that different selections induce different inversion trajectories, leading to substantial variation in reconstruction and editing quality. For rectified flows, we further find that this variation is closely associated with trajectory straightness, motivating straightness as a principled selection criterion. We propose SelFix, a fixed-point inversion method that selects fixed-point solutions inducing straighter inverse trajectories while retaining convergence to an exact inverse root under standard local assumptions. Experiments on FLUX.1-dev and PIE-Bench show that SelFix improves fixed-point inversion, achieving stronger real-image reconstruction and better source-preserving prompt-based editing than prior inversion baselines. The code is available at https://github.com/seminkim/selfix.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SelFix, a fixed-point inversion technique for rectified flows that selects among multiple fixed-point solutions by preferring those inducing straighter inverse trajectories. This is motivated by an observed association between trajectory straightness and variation in reconstruction/editing quality. The method retains a convergence guarantee to an exact inverse root under standard local assumptions. Experiments on FLUX.1-dev and PIE-Bench report improved real-image reconstruction and source-preserving prompt-based editing relative to prior fixed-point inversion baselines, with code released.
Significance. If the straightness-quality association proves robust and the selection rule preserves the fixed-point convergence conditions, SelFix would supply a practical, low-overhead improvement to inversion for flow-based generative models, with direct utility for training-free editing pipelines. The open-source code is a clear strength for reproducibility.
major comments (3)
- [Abstract and §2] Abstract and §2 (motivation): the claim that quality variation across fixed-point roots 'is closely associated with trajectory straightness' is presented as the justification for the selection rule, yet remains an observational statement without a controlled ablation or quantitative correlation analysis demonstrating that straightness is the operative factor rather than a proxy for other regularity conditions.
- [§3] §3 (method): the convergence guarantee is asserted to hold 'under standard local assumptions,' but the manuscript does not verify that the straightness-based selection among candidate roots preserves the contraction-mapping or Lipschitz conditions required for uniqueness and convergence of the fixed-point iteration.
- [§4] §4 (experiments): reported gains on FLUX.1-dev and PIE-Bench are given without the precise definition of the straightness metric used for selection or ablations that isolate the contribution of the selection rule from other implementation details of the fixed-point solver.
minor comments (2)
- [§3] Notation for the straightness measure and the fixed-point iteration should be introduced with explicit equations rather than prose descriptions.
- [Figures] Figure captions should state the exact number of fixed-point iterations and the precise metric values shown.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below, indicating revisions where the manuscript will be updated to strengthen the presentation and analysis.
read point-by-point responses
-
Referee: [Abstract and §2] Abstract and §2 (motivation): the claim that quality variation across fixed-point roots 'is closely associated with trajectory straightness' is presented as the justification for the selection rule, yet remains an observational statement without a controlled ablation or quantitative correlation analysis demonstrating that straightness is the operative factor rather than a proxy for other regularity conditions.
Authors: We agree that the current manuscript presents the association primarily through observation and qualitative examples. In the revision we will add a quantitative correlation analysis (e.g., Pearson/Spearman coefficients between straightness scores and reconstruction/editing metrics across a held-out set of images) together with a controlled comparison that holds other regularity measures fixed. This will clarify whether straightness is the operative driver. revision: yes
-
Referee: [§3] §3 (method): the convergence guarantee is asserted to hold 'under standard local assumptions,' but the manuscript does not verify that the straightness-based selection among candidate roots preserves the contraction-mapping or Lipschitz conditions required for uniqueness and convergence of the fixed-point iteration.
Authors: The selection rule chooses among roots that each satisfy the fixed-point equation; it does not modify the underlying iteration map or its local contraction properties. Consequently the standard local assumptions continue to guarantee convergence to whichever root is selected. We will add an explicit paragraph in §3 clarifying this point and, if space permits, a short remark on why the Lipschitz constant of the map remains unchanged by the post-hoc selection. revision: yes
-
Referee: [§4] §4 (experiments): reported gains on FLUX.1-dev and PIE-Bench are given without the precise definition of the straightness metric used for selection or ablations that isolate the contribution of the selection rule from other implementation details of the fixed-point solver.
Authors: We will insert the exact mathematical definition of the straightness metric (including the discretization used) into §3 and the experimental section. In addition we will report an ablation that runs the identical fixed-point solver with and without the straightness selection criterion, thereby isolating its contribution from other solver details. revision: yes
Circularity Check
No significant circularity; selection rule is independently motivated and externally validated
full rationale
The paper's core proposal (SelFix) defines a straightness-based selection rule from an empirical observation of quality variation across fixed-point roots in rectified flows. This observation is presented as an external finding rather than a quantity fitted or defined by the method itself. Convergence to an exact inverse is retained under standard local assumptions independent of the selection criterion. No self-citations, fitted-input predictions, or reductions by construction appear in the derivation; the method is evaluated on external models (FLUX.1-dev) and benchmarks (PIE-Bench), confirming the claim is self-contained against independent data.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard local assumptions guarantee convergence to an exact inverse root
Reference graph
Works this paper leans on
-
[1]
Heinz H Bauschke. 1996. The approximation of fixed points of compositions of nonexpansive mappings in Hilbert space.Journal of Mathematical Analysis and Applications, 202(1):150–159
1996
-
[2]
Black Forest Labs. 2024. Announcing Black Forest Labs. Blog post on Black Forest Labs website. Accessed: 2025-05-14
2024
-
[3]
Manuel Brack, Felix Friedrich, Katharina Kornmeier, Linoy Tsaban, Patrick Schramowski, Kristian Kersting, and Apolinário Passos. 2024. LEDITS++: Limitless Image Editing Using Text-to-Image Models. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2024, Seattle, WA, USA, June 16-22, 2024, pages 8861–8870. IEEE
2024
-
[4]
Mingdeng Cao, Xintao Wang, Zhongang Qi, Ying Shan, Xiaohu Qie, and Yinqiang Zheng
-
[5]
InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 22560–22570
MasaCtrl: Tuning-Free Mutual Self-Attention Control for Consistent Image Synthesis and Editing. InProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 22560–22570
-
[6]
Yeonwoo Cha, Jaehoon Yoo, Semin Kim, Yunseo Park, Jinhyeon Kwon, and Seunghoon Hong
-
[7]
Training-Free Refinement of Flow Matching with Divergence-based Sampling.arXiv preprint arXiv:2604.04646
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
A Cuntavepanit and B Panyanak. 2011. Strong convergence of modified Halpern iterations in CAT (0) spaces.Fixed Point Theory and Applications, 2011(1):869458
2011
-
[9]
Yingying Deng, Xiangyu He, Changwang Mei, Peisong Wang, and Fan Tang. 2025. FireFlow: Fast Inversion of Rectified Flow for Image Semantic Editing. InForty-second International Conference on Machine Learning
2025
-
[10]
Wenkai Dong, Song Xue, Xiaoyue Duan, and Shumin Han. 2023. Prompt Tuning Inversion for Text-Driven Image Editing Using Diffusion Models. InIEEE/CVF International Conference on Computer Vision, ICCV 2023, Paris, France, October 1-6, 2023, pages 7396–7406. IEEE. 10
2023
-
[11]
Patrick Esser, Sumith Kulal, Andreas Blattmann, Rahim Entezari, Jonas Müller, Harry Saini, Yam Levi, Dominik Lorenz, Axel Sauer, Frederic Boesel, Dustin Podell, Tim Dockhorn, Zion English, Kyle Lacey, Alex Goodwin, Yannik Marek, and Robin Rombach. 2024. Scaling Rectified Flow Transformers for High-Resolution Image Synthesis
2024
-
[12]
Daniel Garibi, Or Patashnik, Andrey V oynov, Hadar Averbuch-Elor, and Daniel Cohen-Or. 2024. Renoise: Real image inversion through iterative noising. InEuropean Conference on Computer Vision, pages 395–413. Springer
2024
-
[13]
Pengsheng Guo and Alex Schwing. 2025. Variational Rectified Flow Matching. InForty-second International Conference on Machine Learning
2025
-
[14]
Benjamin Halpern. 1967. Fixed points of nonexpanding maps.Bulletin of the American Mathematical Society, 73(6):957 – 961
1967
-
[15]
Amir Hertz, Ron Mokady, Jay Tenenbaum, Kfir Aberman, Yael Pritch, and Daniel Cohen- Or. 2023. Prompt-to-Prompt Image Editing with Cross-Attention Control. InThe Eleventh International Conference on Learning Representations
2023
-
[16]
Guanlong Jiao, Biqing Huang, Kuan-Chieh Jackson Wang, and Renjie Liao. 2026. UniEdit-Flow: Unleashing Inversion and Editing in the Era of Flow Models. InThe Fourteenth International Conference on Learning Representations
2026
-
[17]
Xuan Ju, Ailing Zeng, Yuxuan Bian, Shaoteng Liu, and Qiang Xu. 2024. PnP Inversion: Boosting Diffusion-based Editing with 3 Lines of Code.International Conference on Learning Representations (ICLR)
2024
-
[18]
Semin Kim, Jaehoon Yoo, Jinwoo Kim, Yeonwoo Cha, Saehoon Kim, and Seunghoon Hong
-
[19]
Simulation-free training of neural odes on paired data.Advances in Neural Information Processing Systems, 37:60212–60236
-
[20]
Black Forest Labs. 2025. FLUX.2: Frontier Visual Intelligence. https://bfl.ai/blog/ flux-2
2025
-
[21]
Sangyun Lee, Beomsu Kim, and Jong Chul Ye. 2023. Minimizing trajectory curvature of ode-based generative models. InInternational Conference on Machine Learning, pages 18957– 18973. PMLR
2023
-
[22]
Xingchao Liu, Chengyue Gong, and Qiang Liu. 2023. Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow. InThe Eleventh International Conference on Learning Representations, ICLR 2023, Kigali, Rwanda, May 1-5, 2023. OpenReview.net
2023
- [23]
-
[24]
Ron Mokady, Amir Hertz, Kfir Aberman, Yael Pritch, and Daniel Cohen-Or. 2023. Null-text Inversion for Editing Real Images using Guided Diffusion Models. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2023, Vancouver, BC, Canada, June 17-24, 2023, pages 6038–6047. IEEE
2023
-
[25]
Zhihong Pan, Riccardo Gherardi, Xiufeng Xie, and Stephen Huang. 2023. Effective real image editing with accelerated iterative diffusion inversion. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 15912–15921
2023
-
[26]
Gaurav Parmar, Krishna Kumar Singh, Richard Zhang, Yijun Li, Jingwan Lu, and Jun-Yan Zhu. 2023. Zero-shot Image-to-Image Translation. InACM SIGGRAPH 2023 Conference Proceedings, SIGGRAPH 2023, Los Angeles, CA, USA, August 6-10, 2023, pages 11:1–11:11. ACM
2023
-
[27]
Dustin Podell, Zion English, Kyle Lacey, Andreas Blattmann, Tim Dockhorn, Jonas Müller, Joe Penna, and Robin Rombach. 2024. SDXL: Improving Latent Diffusion Models for High- Resolution Image Synthesis. InThe Twelfth International Conference on Learning Representa- tions. 11
2024
-
[28]
Aram-Alexandre Pooladian, Heli Ben-Hamu, Carles Domingo-Enrich, Brandon Amos, Yaron Lipman, and Ricky T Chen. 2023. Multisample Flow Matching: Straightening Flows with Minibatch Couplings.ICML 2023
2023
-
[29]
Aditya Ramesh, Prafulla Dhariwal, Alex Nichol, Casey Chu, and Mark Chen. 2022. Hierarchical Text-Conditional Image Generation with CLIP Latents.arXiv preprint arXiv:2204.06125
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[30]
Robin Rombach, Andreas Blattmann, Dominik Lorenz, Patrick Esser, and Björn Ommer. 2022. High-resolution image synthesis with latent diffusion models. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 10684–10695
2022
- [31]
-
[32]
Dvir Samuel, Barak Meiri, Haggai Maron, Yoad Tewel, Nir Darshan, Shai Avidan, Gal Chechik, and Rami Ben-Ari. 2025. Lightning-Fast Image Inversion and Editing for Text-to-Image Diffusion Models. InThe Thirteenth International Conference on Learning Representations
2025
-
[33]
Jiaming Song, Chenlin Meng, and Stefano Ermon. 2021. Denoising Diffusion Implicit Models. InICLR. OpenReview.net
2021
-
[34]
Alexander Tong, Kilian FATRAS, Nikolay Malkin, Guillaume Huguet, Yanlei Zhang, Jarrid Rector-Brooks, Guy Wolf, and Yoshua Bengio. 2023. Improving and generalizing flow-based generative models with minibatch optimal transport.Transactions on Machine Learning Research
2023
-
[35]
Bram Wallace, Akash Gokul, and Nikhil Naik. 2023. Edict: Exact diffusion inversion via coupled transformations. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 22532–22541
2023
-
[36]
Chenru Wang, Beier Zhu, and Chi Zhang. 2026. Free Lunch for Stabilizing Rectified Flow Inversion. InThe Fourteenth International Conference on Learning Representations
2026
-
[37]
Jiangshan Wang, Junfu Pu, Zhongang Qi, Jiayi Guo, Yue Ma, Nisha Huang, Yuxin Chen, Xiu Li, and Ying Shan. 2025. Taming Rectified Flow for Inversion and Editing. InInternational Conference on Machine Learning, pages 64044–64058. PMLR
2025
-
[38]
Rainer Wittmann. 1992. Approximation of fixed points of nonexpansive mappings.Archiv der mathematik, 58(5):486–491. 12 Algorithm 1SelFix: Straightness-selected fixed-point inversion Require: Image latent x0; timesteps 0 =t 0 < t 1 <· · ·< t N with hj =t j −t j−1; velocity field uθ(·, t, c); conditioning c; fixed-point iterations K; window W ; Schedule {αk...
1992
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.