Comparing Deterministic and Stochastic Parameter Recovery Algorithms Applied to Chaotic Systems
Pith reviewed 2026-06-26 18:45 UTC · model grok-4.3
The pith
Deterministic parameter recovery algorithms paired with deterministic data assimilation recover parameters from noisy chaotic data more accurately and efficiently than stochastic methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Through computational experiments on the synthetic noisy data, the paper establishes that deterministic PR algorithms combined with deterministic DA algorithms yield more accurate and stable parameter estimates than stochastic PR algorithms across varying noise levels, and that the deterministic approaches require less computation time and power.
What carries the argument
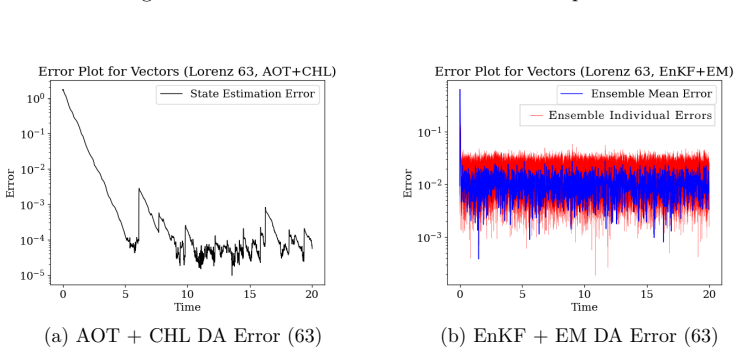
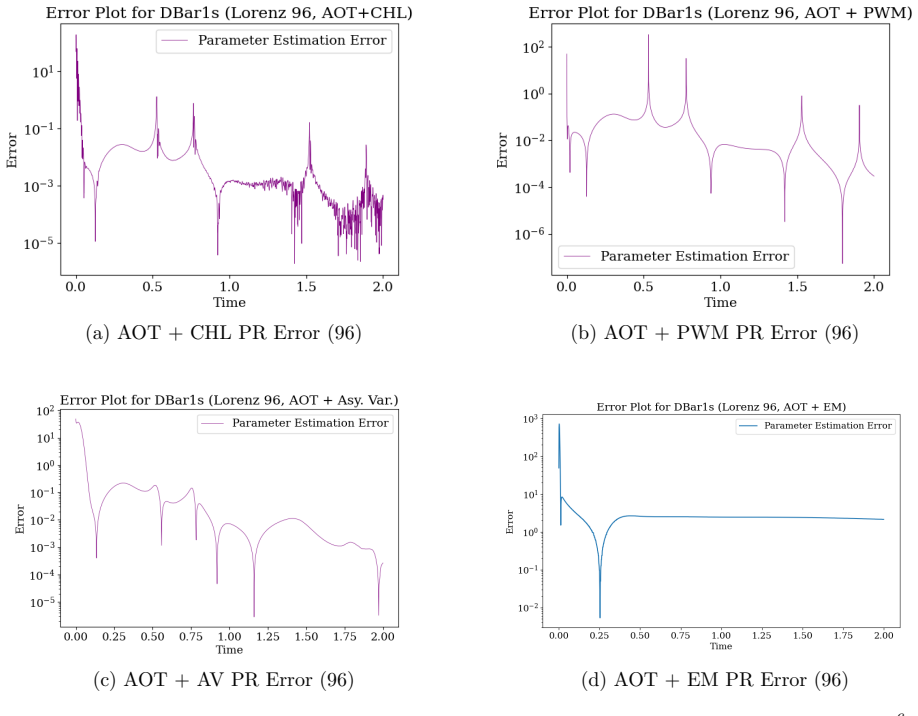
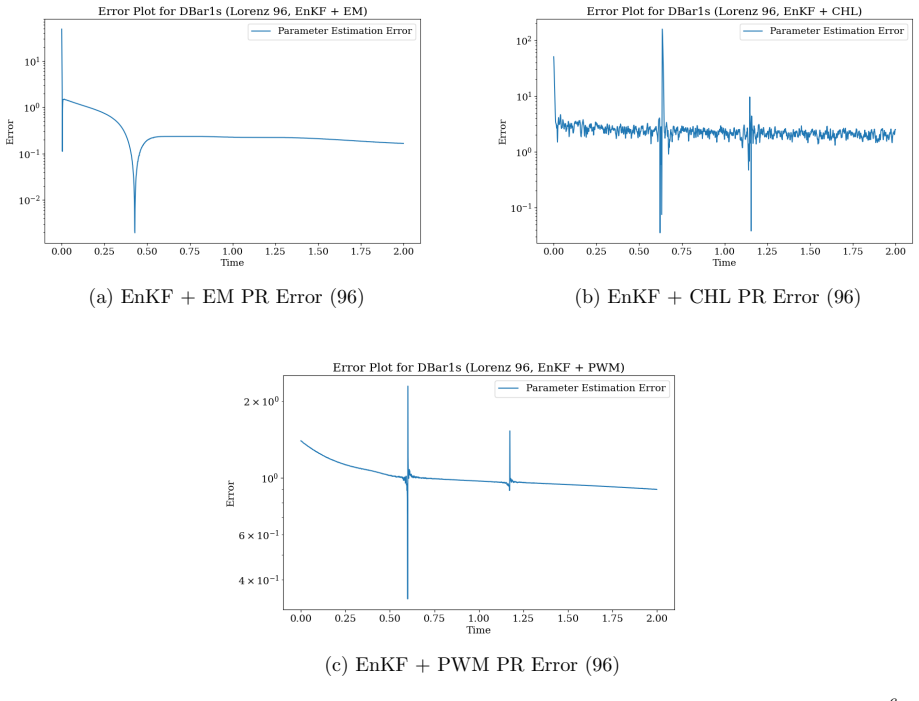
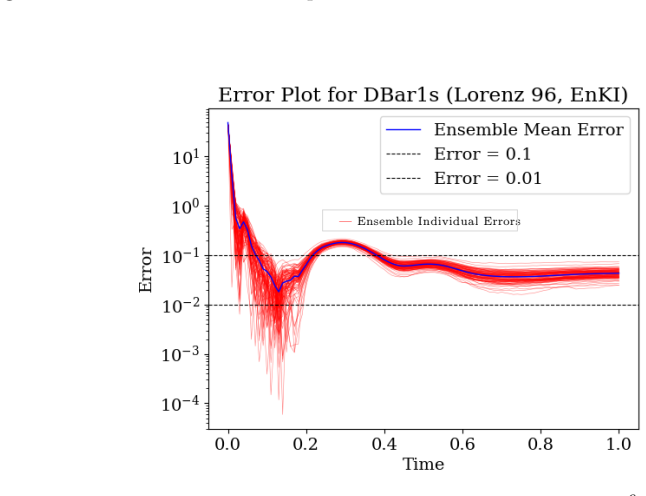
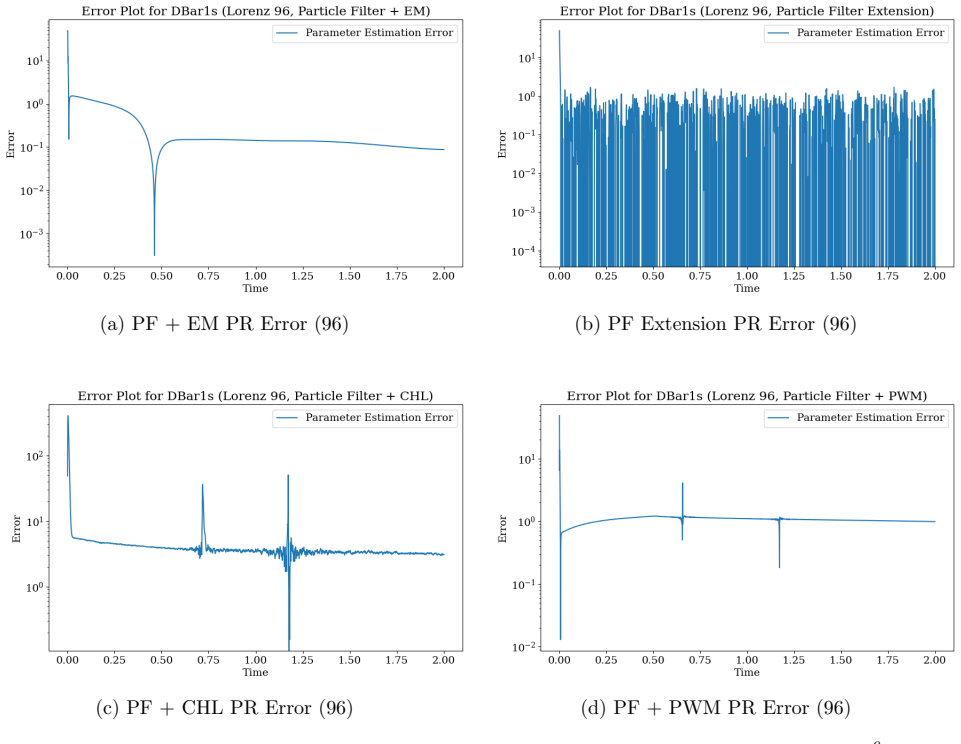
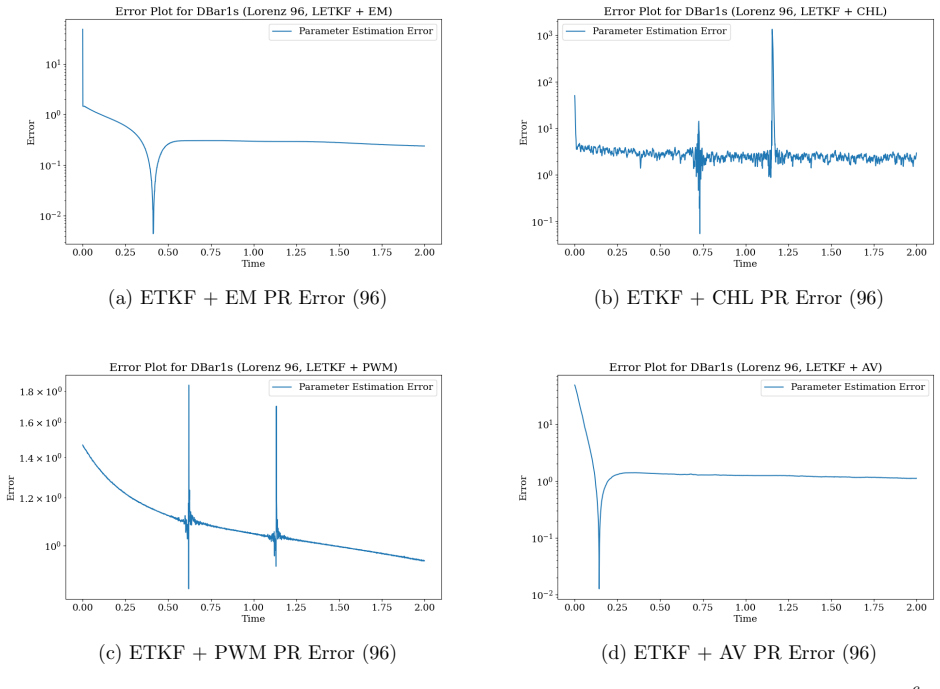
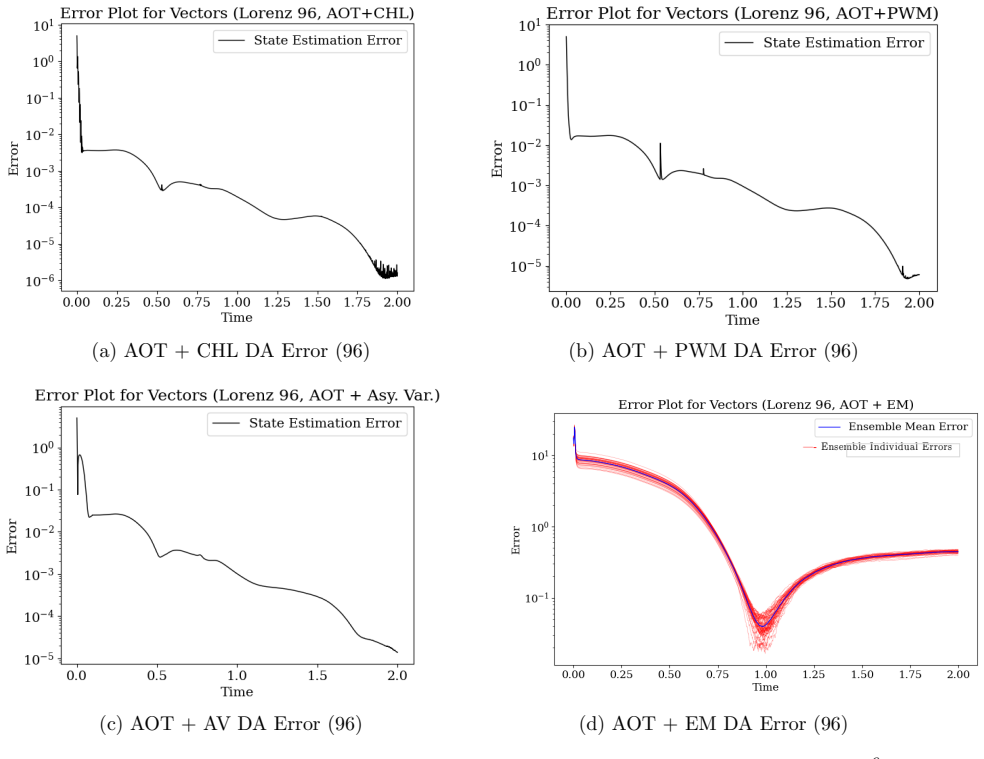
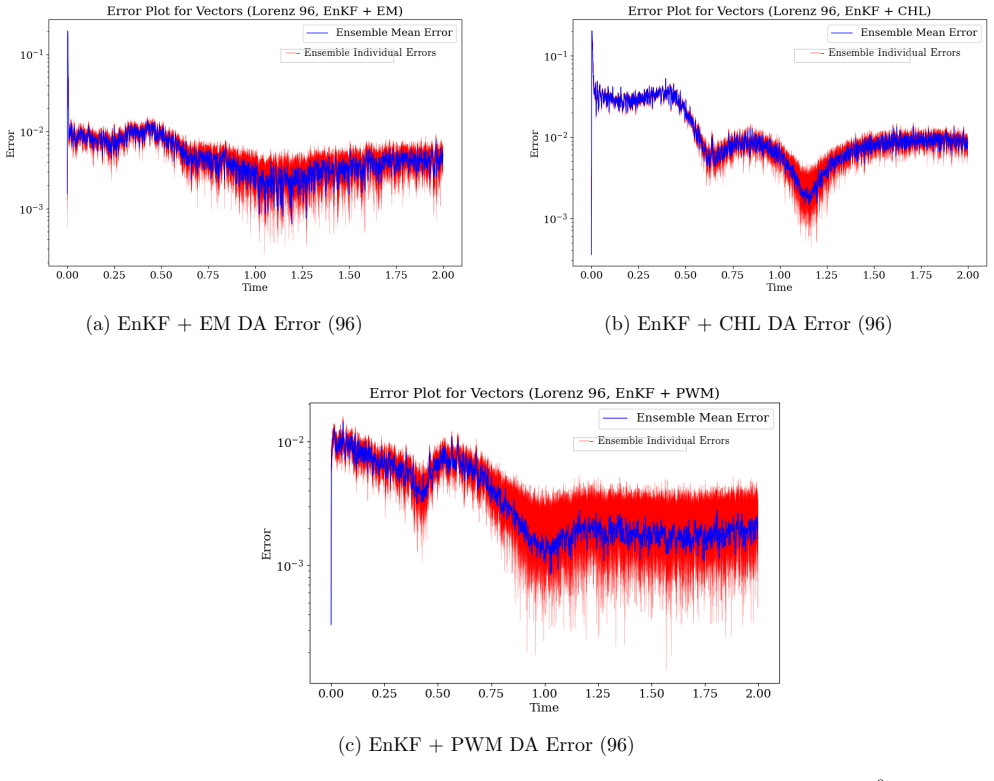
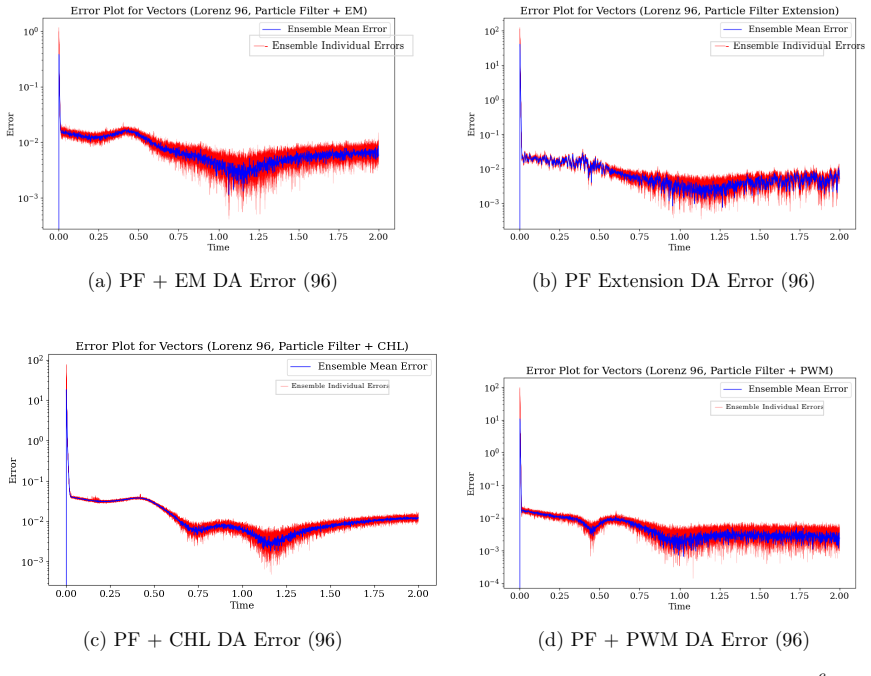
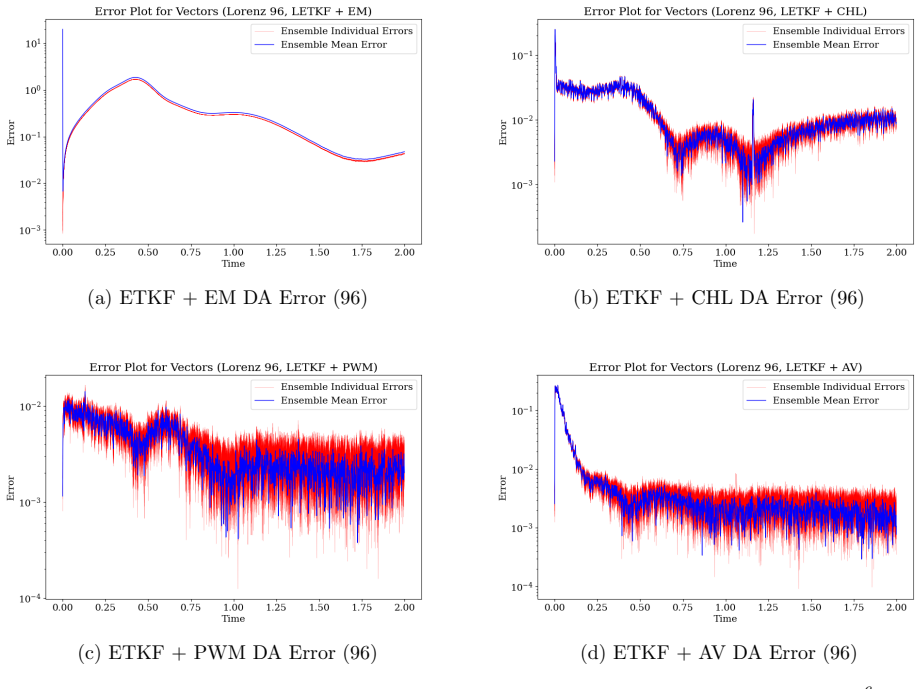
The direct numerical comparison of deterministic and stochastic parameter recovery (PR) algorithms, each paired with either deterministic or stochastic data assimilation (DA), applied to white-noise-perturbed trajectories from the Lorenz '63 and multiscale Lorenz '96 systems.
If this is right
- Deterministic PR maintains its accuracy edge even as noise amplitude grows.
- Pairing deterministic DA with deterministic PR reduces variance in the recovered parameters.
- Stochastic PR methods consume more wall-clock time and memory for the same task.
- Operational use of chaotic models should test deterministic PR before defaulting to ensemble-based stochastic schemes.
Where Pith is reading between the lines
- If the deterministic advantage holds, real-time parameter tracking in resource-limited settings becomes feasible without large ensembles.
- The result suggests testing the same algorithm pairs on other chaotic models such as the Rössler system to check generality.
- Efficiency gains could allow repeated recovery runs inside optimization loops that were previously too slow.
Load-bearing premise
Synthetic trajectories created by adding white noise to semi-analytic solutions of the Lorenz systems capture the statistical structure of noise in real observations of chaotic physical systems.
What would settle it
Applying the same deterministic and stochastic algorithm pairs to parameter recovery from actual laboratory measurements of a chaotic system, such as Rayleigh-Bénard convection, and checking whether the accuracy and stability advantage of the deterministic pair vanishes.
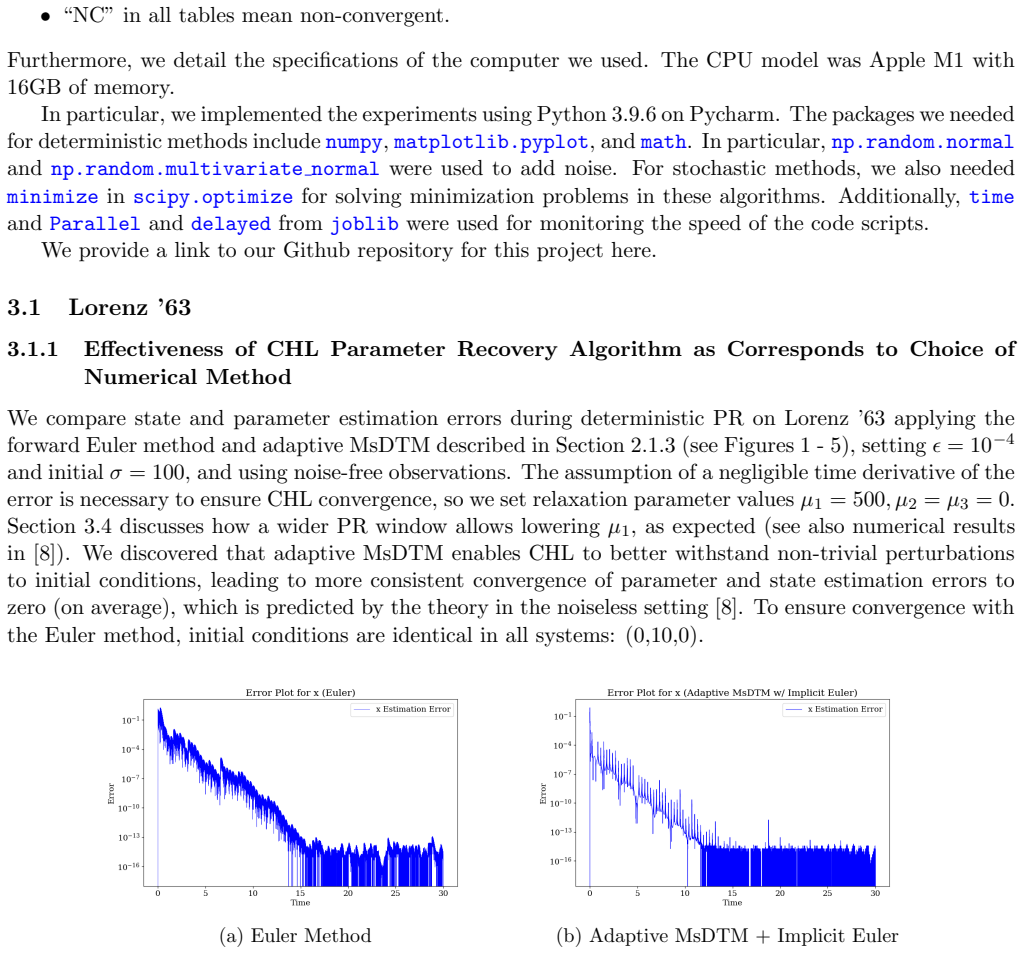
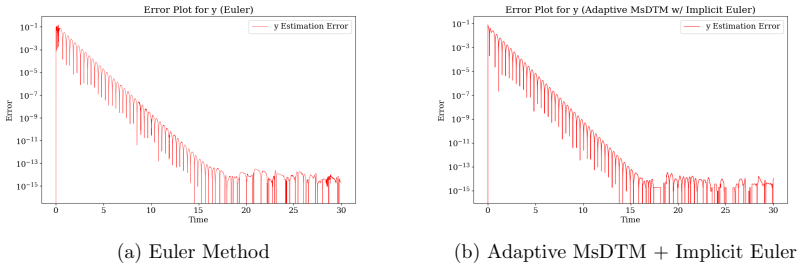
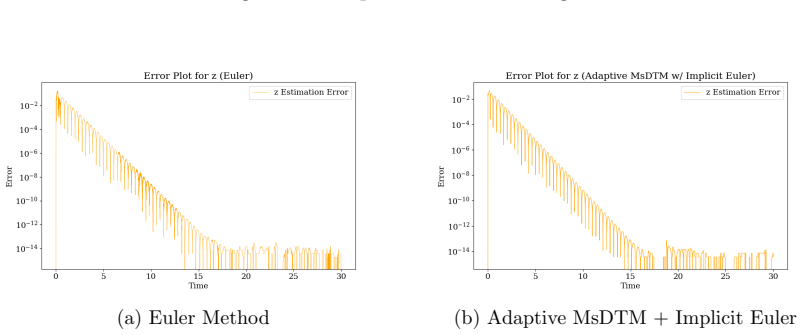
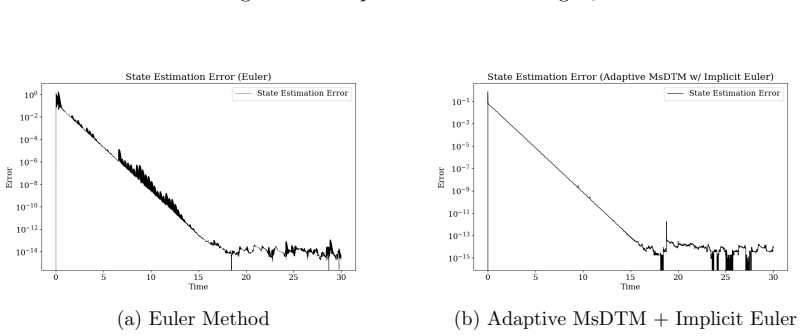
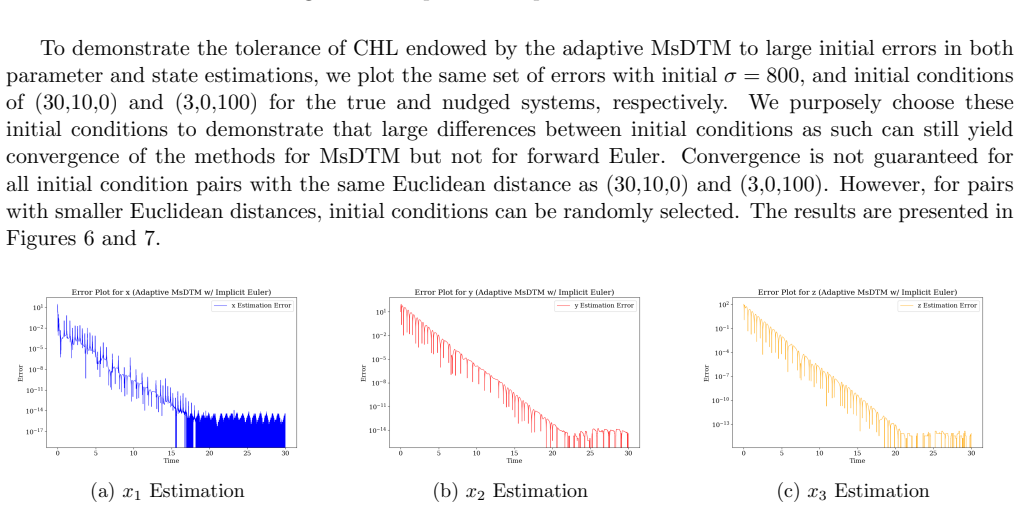
Figures

read the original abstract
This paper explores the effectiveness of various novel deterministic and traditional stochastic data assimilation (DA) and parameter recovery (PR) algorithms given noisy data from chaotic systems. We use semi-analytic methods to numerically construct synthetic data from the Lorenz '63 and multiscale Lorenz '96 chaotic dynamical systems, adding white noise. Our findings show that, for different noise levels, deterministic PR algorithms paired with deterministic DA algorithms are shown computationally to be overall more accurate and stable than stochastic PR algorithms. Additionally, deterministic PR methods have demonstrated greater speed and efficiency, requiring less computational power than stochastic PR methods. This suggests that future work should consider exploring the full potential of deterministic PR algorithms in the presence of noise.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript computationally compares deterministic and stochastic parameter recovery (PR) algorithms, paired with data assimilation (DA) methods, on synthetic noisy observations generated from the Lorenz '63 and multiscale Lorenz '96 systems. It claims that deterministic PR+DA combinations are more accurate, stable, faster, and computationally efficient than stochastic PR methods across varying noise levels, recommending further exploration of deterministic PR approaches.
Significance. If the reported performance advantages hold under fully documented implementations and standard error metrics, the work could inform algorithm selection for inverse problems in chaotic systems. The use of semi-analytic data generation is a strength for reproducibility, but the absence of any equations, quantitative results, or implementation details prevents assessment of whether the findings advance the field beyond existing comparisons in data assimilation literature.
major comments (3)
- [Abstract] Abstract: The central claim that deterministic PR algorithms paired with deterministic DA are 'overall more accurate and stable' supplies no error metrics (e.g., RMSE, parameter bias), no definitions of stability, no statistical tests, and no baseline comparisons, so the computational findings cannot be evaluated or reproduced from the given text.
- [Abstract] Abstract and throughout: The experimental setup relies on semi-analytic trajectories from the exact Lorenz models with i.i.d. white noise; no discussion or sensitivity tests address how results might change under model error, correlated noise, or nonlinear observation operators, which are load-bearing for the recommendation to prefer deterministic methods on 'noisy chaotic observations'.
- [Abstract] Abstract: No mention of the specific deterministic and stochastic PR/DA algorithms tested, their governing equations, optimization procedures, or convergence criteria, making it impossible to determine whether the reported speed and efficiency advantages are intrinsic or implementation-dependent.
Simulated Author's Rebuttal
We thank the referee for the detailed comments. We agree that the abstract requires expansion to include quantitative metrics, algorithm specifics, and a limitations discussion. We will revise accordingly while preserving the core experimental design, which isolates algorithm performance under controlled white noise.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that deterministic PR algorithms paired with deterministic DA are 'overall more accurate and stable' supplies no error metrics (e.g., RMSE, parameter bias), no definitions of stability, no statistical tests, and no baseline comparisons, so the computational findings cannot be evaluated or reproduced from the given text.
Authors: We accept this criticism of the abstract. The full manuscript reports RMSE values for both state and parameter estimates, defines stability via convergence rates across noise levels (0.1 to 1.0), and includes comparisons against standard stochastic baselines. We will add a concise summary of these metrics, the stability definition, and baseline results to the abstract in the revision. revision: yes
-
Referee: [Abstract] Abstract and throughout: The experimental setup relies on semi-analytic trajectories from the exact Lorenz models with i.i.d. white noise; no discussion or sensitivity tests address how results might change under model error, correlated noise, or nonlinear observation operators, which are load-bearing for the recommendation to prefer deterministic methods on 'noisy chaotic observations'.
Authors: The study deliberately uses exact-model white-noise observations to provide a controlled benchmark isolating PR/DA algorithm differences. We will add an explicit limitations paragraph discussing the absence of model error and correlated noise, noting that extension to those regimes is future work. No sensitivity tests were performed, so we cannot claim robustness beyond the tested conditions. revision: partial
-
Referee: [Abstract] Abstract: No mention of the specific deterministic and stochastic PR/DA algorithms tested, their governing equations, optimization procedures, or convergence criteria, making it impossible to determine whether the reported speed and efficiency advantages are intrinsic or implementation-dependent.
Authors: We will revise the abstract to name the tested methods (e.g., 4D-Var and ensemble Kalman filter variants for DA; gradient-descent and MCMC-style approaches for PR) and briefly note the optimization and convergence criteria used. The methods section already contains the governing equations and implementation details; the abstract will now reference them. revision: yes
Circularity Check
No derivation chain present; computational comparison has no self-referential reductions
full rationale
The paper is a numerical study comparing PR and DA algorithms on synthetic Lorenz data with added white noise. No mathematical derivation, prediction, or first-principles claim is advanced that could reduce to its own inputs by construction. The abstract and described results are direct outputs of the reported experiments; no fitted parameters are relabeled as predictions, no self-citations are invoked as uniqueness theorems, and no ansatz is smuggled via prior work. The data-generation choice (semi-analytic trajectories plus i.i.d. noise) is an explicit modeling assumption, not a circular step. Per the hard rules, absence of any quotable reduction to self-definition or fitted input means the circularity score is 0.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Collin Victor Adam Larios Yuan Pei. “The second-best way to do sparse-in-time continuous data as- similation: Improving convergence rates for the 2D and 3D Navier-Stokes equations”. In:(submitted) arXiv:2303.03495(2023)
arXiv 2023
-
[2]
Continuous data assimilation using general interpolant observables
Abderrahim Azouani, Eric Olson, and Edriss S. Titi. “Continuous data assimilation using general interpolant observables”. In:J. Nonlinear Sci.24.2 (2014), pp. 277–304.issn: 0938-8974.doi:10. 1007/s00332-013-9189-y.url:http://dx.doi.org/10.1007/s00332-013-9189-y
-
[3]
Learning Enhanced Ensemble Filters
Eviatar Bach, Ricardo Baptista, Edoardo Calvello, Bohan Chen, and Andrew Stuart. “Learning Enhanced Ensemble Filters”. In:arXiv:2504.17836(2025)
arXiv 2025
-
[4]
Hakima Bessaih, Eric Olson, and Edriss S. Titi. “Continuous data assimilation with stochastically noisy data”. In:Nonlinearity28.3 (2015), pp. 729–753.issn: 0951-7715.doi:10.1088/0951-7715/ 28/3/729.url:http://dx.doi.org/10.1088/0951-7715/28/3/729
-
[5]
Animikh Biswas and Michal Branicki. “A unified framework for the analysis of accuracy and stability of a class of approximate Gaussian filters for the Navier-Stokes Equations”. In:arXiv(2024).doi: 10.48550/arXiv.2402.14078.url:https://doi.org/10.48550/arXiv.2402.14078
work page doi:10.48550/arxiv.2402.14078.url:https://doi.org/10.48550/arxiv.2402.14078 2024
-
[6]
Ensemble Kalman Methods: A Mean Field Perspective
Edoardo Calvello, Sebastian Reich, and Andrew M. Stuart. “Ensemble Kalman Methods: A Mean Field Perspective”. In:arXiv(2024).doi:10.48550/arXiv.2209.11371.url:https://arxiv. org/abs/2209.11371
work page doi:10.48550/arxiv.2209.11371.url:https://arxiv 2024
-
[7]
Parameter recovery for the 2 dimensional Navier–Stokes equations via continuous data assimilation
Elizabeth Carlson, Joshua Hudson, and Adam Larios. “Parameter recovery for the 2 dimensional Navier–Stokes equations via continuous data assimilation”. In:SIAM J. Sci. Comput.42.1 (2020), A250–A270.issn: 1064-8275.doi:10 . 1137 / 19M1248583.url:https : / / doi . org / 10 . 1137 / 19M1248583
2020
-
[8]
Dynamically learning the parameters of a chaotic system using partial observations
Elizabeth Carlson, Joshua Hudson, Adam Larios, Vincent R. Martinez, Eunice Ng, and Jared White- head. “Dynamically learning the parameters of a chaotic system using partial observations”. In: Discrete Contin Dyn Syst Ser A42(8) (2022), pp. 3809–3839.doi:10.3934/dcds.2022033.url: http://dx.doi.org/10.3934/dcds.2022033
-
[9]
Nan Chen and Andrew Majda. “Conditional Gaussian Systems for Multiscale Nonlinear Stochastic Systems: Prediction, State Estimation and Uncertainty Quantification”. In:Entropy (Basel)20.7 (2018), p. 509.doi:10.3390/e20070509
-
[10]
Autodifferentiable Ensemble Kalman Fil- ters
Yuming Chen, Daniel Sanz-Alonso, and Rebecca Willett. “Autodifferentiable Ensemble Kalman Fil- ters”. In:SIAM J. Math. Data Sci4.2 (2022).doi:10.1137/21M1434477.url:https://doi.org/ 10.1137/21M1434477
-
[11]
Journal of the Royal Statistical Society: Series B (Methodological) , author =
Arthur P. Dempster, Nan M. Laird, and Donald B. Rubin. “Maximum likelihood from incomplete data via the EM algorithm”. In:J. Roy. Statist. Soc. Ser. B39.1 (1977). With discussion, pp. 1–38. issn: 0035-9246.doi:10.1111/j.2517-6161.1977.tb01600.x.url:https://doi.org/10.1111/ j.2517-6161.1977.tb01600.x
work page doi:10.1111/j.2517-6161.1977.tb01600.x.url:https://doi.org/10.1111/ 1977
-
[12]
Journal of Geophysical Research: Oceans 99, 10143–10162
Geir Evensen. “Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics”. In:J. Geophys. Res.99.10 (1994).doi:10 . 1029 / 94JC00572.url:https://doi.org/10.1029/94JC00572
-
[13]
Ciprian Foias, Cecilia F. Mondaini, and Edriss S. Titi. “A discrete data assimilation scheme for the solutions of the two-dimensional Navier–Stokes equations and their statistics”. In:SIAM J. Appl. Dyn. Syst.15.4 (2016), pp. 2109–2142.issn: 1536-0040.doi:10 . 1137 / 16M1076526.url:http : //dx.doi.org/10.1137/16M1076526. 41
-
[14]
The Levenberg-Marquardt algorithm for nonlinear least squares curve-fitting prob- lems
Henri P. Gavin. “The Levenberg-Marquardt algorithm for nonlinear least squares curve-fitting prob- lems”. In:Duke University(2024).url:https://people.duke.edu/ ~hpgavin/m-files/lm.pdf
2024
-
[15]
Learning nonlinear dynamical systems using an EM al- gorithm
Zoubin Ghahramani and Sam T. Roweis. “Learning nonlinear dynamical systems using an EM al- gorithm”. In:Proceedings of the 11th International Conference on Neural Information Processing Systems, Denver, CO, USA. 1998, pp. 431–437.url:https://papers.nips.cc/paper_files/ paper/1998/file/0ebcc77dc72360d0eb8e9504c78d38bd-Paper.pdf
1998
-
[16]
Non-asymptotic analysis of ensemble Kalman updates: effective dimension and localization
Omar Al-Ghattas and Daniel Sanz-Alonso. “Non-asymptotic analysis of ensemble Kalman updates: effective dimension and localization”. In:Information and Inference: A Journal of the IMA13.1 (Mar. 2024), iaad043.issn: 2049-8772.doi:10.1093/imaiai/iaad043. eprint:https://academic. oup.com/imaiai/article-pdf/13/1/iaad043/57003522/iaad043.pdf.url:https://doi.org...
-
[17]
Adaptive multi-step differential transfor- mation method to solving nonlinear differential equations
Ahmet G¨ okdogan, Mehmet Merdan, and Ahmet Yildirim. “Adaptive multi-step differential transfor- mation method to solving nonlinear differential equations”. In:Mathematical and Computer Modelling 55.3-4 (2012), pp. 761–769.doi:10.1016/j.mcm.2011.09.001
-
[18]
The initialization of numerical models by a dynamic- initialization technique
James E. Hoke and Richard A. Anthes. “The initialization of numerical models by a dynamic- initialization technique”. In:Monthly Weather Review104.12 (1976), pp. 1551–1556.doi:10.1175/ 1520-0493(1976)104<1551:TIONMB>2.0.CO;2
1976
-
[19]
Efficient Data Assimilation for Spatiotemporal Chaos: a Local Ensemble Transform Kalman Filter
B. R. Hunt, E. J. Kostelich, and Istvan Szunyogh. “Efficient Data Assimilation for Spatiotemporal Chaos: a Local Ensemble Transform Kalman Filter”. In:arXiv:0511236(2006)
2006
-
[20]
Ensemble Kalman methods for inverse problems
Marco A. Iglesias, Kody J. H. Law, and Andrew M. Stuart. “Ensemble Kalman methods for inverse problems”. In:Inverse Problems29.4 (2013).doi:10.1088/0266-5611/29/4/045001
-
[21]
Cambridge University Press, 2003.isbn: 9780521796293.url:https://doi.org/10.1017/CBO9780511802270
Eugenia Kalnay.Atmospheric Modeling, Data Assimilation and Predictability. Cambridge University Press, 2003.isbn: 9780521796293.url:https://doi.org/10.1017/CBO9780511802270
-
[22]
2008.url:https://www
David Kuhl and Eric Kostelich.Introduction to LETKF Data Assimilation. 2008.url:https://www. docsity.com/en/docs/introduction-to-letkf-data-assimilation-lab-aosc-614/6568216/
2008
-
[23]
Asymptotic behavior of the extended Kalman filter as a parameter estimator for linear systems
Lennart Ljung. “Asymptotic behavior of the extended Kalman filter as a parameter estimator for linear systems”. In:IEEE Transactions on Automatic Control24.1 (1979), pp. 36–50.doi:10.1109/ TAC.1979.1101943
arXiv 1979
-
[24]
Conceptual dynamical models for turbulence
Andrew J. Majda and Yoonsang Lee. “Conceptual dynamical models for turbulence”. In:Proceedings of the National Academy of Sciences (PNAS)(2014).doi:10.1073/pnas.1404914111.url:https: //doi.org/10.1073/pnas.1404914111
-
[25]
Convergence analysis of a viscosity parameter recovery algorithm for the 2D Navier–Stokes equations
Vincent R. Martinez. “Convergence analysis of a viscosity parameter recovery algorithm for the 2D Navier–Stokes equations”. In:Nonlinearity35.5 (2022), pp. 2241–2287.doi:10 . 1088 / 1361 - 6544/ac5362.url:https://doi.org/10.1088/1361-6544/ac5362
-
[26]
Relaxation-based schemes for on-the- fly parameter estimation in dissipative dynamical systems
Vincent R. Martinez, Jacob Murri, and Jared P. Whitehead. “Relaxation-based schemes for on-the- fly parameter estimation in dissipative dynamical systems”. In:Inverse Problems41.5 (2025).doi: 10.1088/1361-6420/adc766.url:https://doi.org/10.1088/1361-6420/adc766
work page doi:10.1088/1361-6420/adc766.url:https://doi.org/10.1088/1361-6420/adc766 2025
-
[27]
Convergence analysis of a viscosity parameter recovery algorithm for the 2D Navier–Stokes equations
Vincent R. Martinez. “Convergence analysis of a viscosity parameter recovery algorithm for the 2D Navier–Stokes equations”. In:Nonlinearity35.5 (2022), pp. 2241–2287.issn: 0951-7715.doi: 10.1088/1361-6544/ac5362.url:https://doi.org/10.1088/1361-6544/ac5362
work page doi:10.1088/1361-6544/ac5362.url:https://doi.org/10.1088/1361-6544/ac5362 2022
-
[28]
Ensemble Kalman filter experiments with a primitive-equation global model
Takemasa Miyoshi. “Ensemble Kalman filter experiments with a primitive-equation global model”. Available athttps://www2.atmos.umd.edu/ ~ekalnay/dissertations/MiyoshiThesis.pdf. PhD thesis. University of Maryland, College Park, 2005. 42
2005
-
[29]
The Gaussian Approach to Adaptive Covariance Inflation and Its Implementa- tion with the Local Ensemble Transform Kalman Filter
Takemasa Miyoshi. “The Gaussian Approach to Adaptive Covariance Inflation and Its Implementa- tion with the Local Ensemble Transform Kalman Filter”. In:Monthly Weather Review139 (5 2011), pp. 1519–1535
2011
-
[30]
Sungju Moon and Jong-Jin Baik. “Using the (3N)-Dimensional Generalized Lorenz Systems as a Testbed for Data Assimilation: The Ensemble Kalman Filter”. In:Monthly Weather Review149.11 (2021), pp. 3691–3705.doi:10.1175/MWR-D-21-0078.1.url:https://journals.ametsoc.org/ view/journals/mwre/149/11/MWR-D-21-0078.1.xml
work page doi:10.1175/mwr-d-21-0078.1.url:https://journals.ametsoc.org/ 2021
-
[31]
Data assimilation for nonlinear systems with a hybrid nonlinear Kalman ensemble transform filter
Lars Nerger. “Data assimilation for nonlinear systems with a hybrid nonlinear Kalman ensemble transform filter”. In:Q. J. R. Meteorol. Soc.148.743 (2021), pp. 620–640.doi:10.1002/qj.4221. url:https://rmets.onlinelibrary.wiley.com/doi/epdf/10.1002/qj.4221
-
[32]
Model discovery on the fly using con- tinuous data assimilation
Joshua Newey, Jared P. Whitehead, and Elizabeth Carlson. “Model discovery on the fly using con- tinuous data assimilation”. In:J. of Comput. Phys.537 (2025), p. 114121.issn: 0021-9991.doi: 10.1016/j.jcp.2025.114121.url:https://doi.org/10.1016/j.jcp.2025.114121
work page doi:10.1016/j.jcp.2025.114121.url:https://doi.org/10.1016/j.jcp.2025.114121 2025
-
[33]
Concurrent multiparameter learn- ing demonstrated on the Kuramoto–Sivashinsky equation
Benjamin Pachev, Jared P. Whitehead, and Shane A. McQuarrie. “Concurrent multiparameter learn- ing demonstrated on the Kuramoto–Sivashinsky equation”. In:SIAM J. Sci. Comput.44.5 (2022), A2974–A2990.issn: 1064-8275.doi:10 . 1137 / 21M1426109.url:https : / / doi . org / 10 . 1137 / 21M1426109
2022
-
[34]
An Elementary Introduction to Kalman Filtering
Yan Pei, Swarnendu Biswas, Donald S. Fussell, and Keshav Pingali. “An elementary introduction to Kalman Filtering”. In:arXiv(2019).doi:10.48550/arXiv.1710.04055.url:https://arxiv. org/abs/1710.04055
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1710.04055.url:https://arxiv 2019
-
[35]
Filtering via simulation: Auxiliary particle filters
M. K. Pitt and N. Shephard. “Filtering via simulation: Auxiliary particle filters”. In:Journal of the American Statistical Association94.446 (1999), pp. 590–599.doi:10.2307/2670179.url:https: //doi.org/10.2307/2670179
-
[36]
Ensemble-based Kalman filters in strongly nonlinear dynamics
Zhaoxia Pu and Joshua Hacker. “Ensemble-based Kalman filters in strongly nonlinear dynamics”. In:Adv. Atmos. Sci.26 (2009), pp. 373–380.doi:10 . 1007 / s00376 - 009 - 0373 - 9.url:https : //doi.org/10.1007/s00376-009-0373-9
-
[37]
Inverse problems and data assimilation
Daniel Sanz-Alonso, Andrew M. Stuart, and Armeen Taeb. “Inverse problems and data assimilation”. In:arXiv(2023).doi:10.48550/arXiv.1810.06191.url:https://arxiv.org/abs/1810.06191
work page doi:10.48550/arxiv.1810.06191.url:https://arxiv.org/abs/1810.06191 2023
-
[38]
Numerical solutions and parameter sensitivity of the Lorenz sys- tem
Vilmer Str¨ om and Eira Larsson. “Numerical solutions and parameter sensitivity of the Lorenz sys- tem”. In:(a Bachelor thesis)(2023).url:https://www.diva- portal.org/smash/get/diva2: 1777317/FULLTEXT01.pdf. 43
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.