Scaling Learning-based AEB with Massive Unlabeled Data
Pith reviewed 2026-06-26 21:22 UTC · model grok-4.3
The pith
Stabilized meta-feedback semi-supervised learning scales AEB models to 1B unlabeled windows, yielding over 100:1 positive-to-false ratio in fleet deployment.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The stabilized MF-SSL framework with Noise-Aware Decoupling and kinematics-gated pseudo-labeling with teacher conflict penalty enables consistent gains as unlabeled data scale from 1M to 1B windows, improving safety while keeping comfort stable. The 1B-trained student model is deployed to hundreds of thousands of vehicles and validated over 10^9 km of driving, achieving a positive-to-false activation ratio exceeding 100:1 and a 35% improvement in accident-free driving mileage over a production rule-only baseline.
What carries the argument
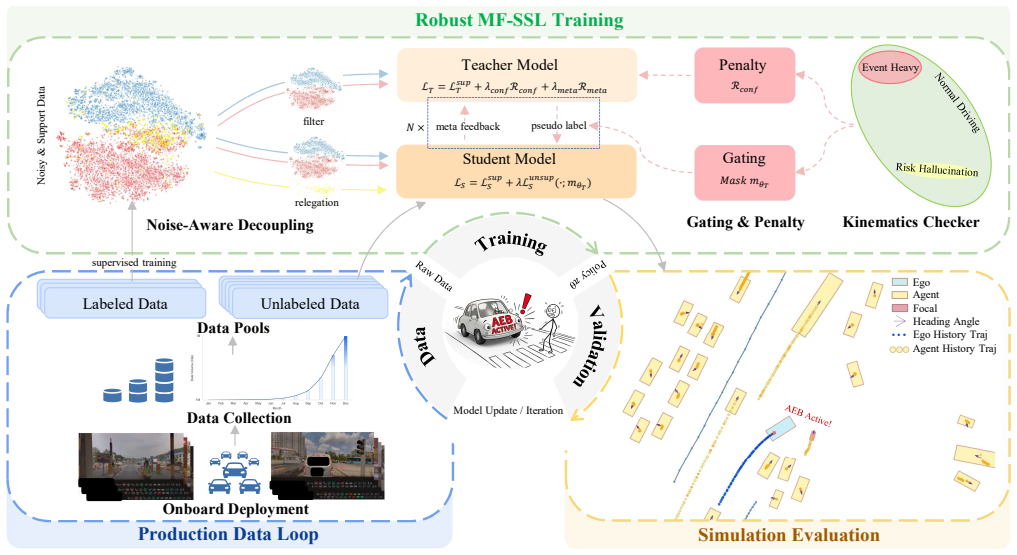
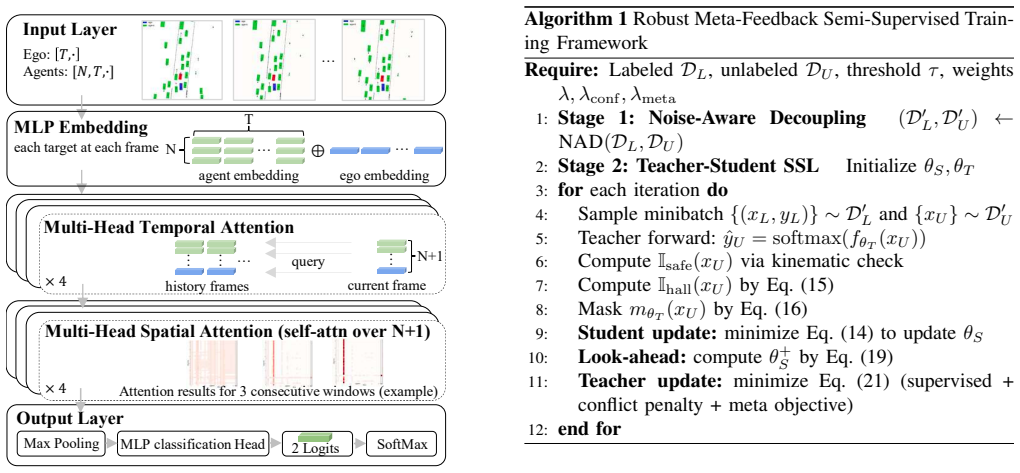
Meta-feedback semi-supervised learning (MF-SSL) stabilized by Noise-Aware Decoupling, which removes ambiguity-prone anchors from the teacher's supervised update, and kinematics-gated pseudo-labeling with teacher conflict penalty to suppress mismatch-induced errors on unlabeled data.
If this is right
- Safety metrics improve consistently as unlabeled data volume increases to 1B windows.
- The deployed model maintains a positive-to-false activation ratio above 100:1.
- Accident-free driving mileage rises 35 percent relative to the rule-only baseline.
- Comfort metrics remain stable while safety improves.
- The framework operates under production constraints with real fleet data.
Where Pith is reading between the lines
- The stabilization techniques could extend to other safety-critical perception tasks that rely on unlabeled fleet data.
- Managing pseudo-label errors through targeted decoupling may lower reliance on large labeled sets in autonomous driving.
- Extended deployment data could test whether error suppression holds across new geographic or weather conditions.
- Similar gating and penalty mechanisms might stabilize semi-supervised learning when labeled and unlabeled distributions differ.
Load-bearing premise
The Noise-Aware Decoupling and kinematics-gated pseudo-labeling with teacher conflict penalty sufficiently suppress systematic pseudo-label errors from anchor ambiguity and labeled-unlabeled mismatch without creating new undetected failure modes in the deployed system.
What would settle it
A measured positive-to-false activation ratio below 100:1 or an accident-free mileage improvement below 35 percent during additional real-world driving beyond the reported 10^9 km would show that the stabilization techniques fail to control pseudo-label errors.
Figures

read the original abstract
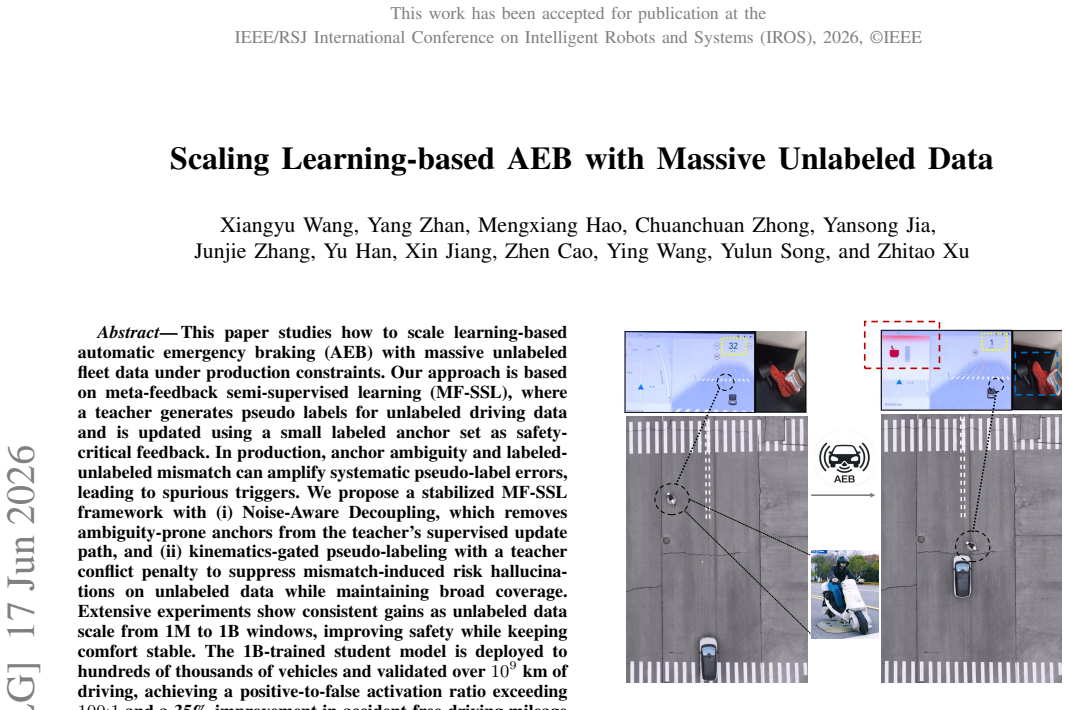
This paper studies how to scale learning-based automatic emergency braking (AEB) with massive unlabeled fleet data under production constraints. Our approach is based on meta-feedback semi-supervised learning (MF-SSL), where a teacher generates pseudo labels for unlabeled driving data and is updated using a small labeled anchor set as safety-critical feedback. In production, anchor ambiguity and labeled-unlabeled mismatch can amplify systematic pseudo-label errors, leading to spurious triggers. We propose a stabilized MF-SSL framework with (i) Noise-Aware Decoupling, which removes ambiguity-prone anchors from the teacher's supervised update path, and (ii) kinematics-gated pseudo-labeling with a teacher conflict penalty to suppress mismatch-induced risk hallucinations on unlabeled data while maintaining broad coverage. Extensive experiments show consistent gains as unlabeled data scale from 1M to 1B windows, improving safety while keeping comfort stable. The 1B-trained student model is deployed to hundreds of thousands of vehicles and validated over \$10^9$ km of driving, achieving a positive-to-false activation ratio exceeding 100:1 and a 35% improvement in accident-free driving mileage over a production rule-only baseline.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a meta-feedback semi-supervised learning (MF-SSL) framework for scaling learning-based automatic emergency braking (AEB) with massive unlabeled fleet data. It proposes two stabilizations—Noise-Aware Decoupling to remove ambiguity-prone anchors from the teacher's update and kinematics-gated pseudo-labeling with a teacher conflict penalty to suppress mismatch-induced hallucinations—while maintaining coverage. Experiments report consistent safety gains as unlabeled data scales from 1M to 1B windows, with the resulting 1B-parameter student model deployed to hundreds of thousands of vehicles and validated over 10^9 km, achieving a positive-to-false activation ratio exceeding 100:1 and a 35% improvement in accident-free driving mileage versus a production rule-only baseline.
Significance. If the deployment metrics are robustly attributable to the proposed MF-SSL stabilizations, the work would provide rare large-scale empirical evidence that stabilized semi-supervised learning can improve safety-critical automotive perception at production scale. The explicit scaling curve over three orders of magnitude in unlabeled data and the 10^9 km real-world validation are notable strengths that go beyond typical academic benchmarks.
major comments (2)
- [Abstract] Abstract: the central claim attributes the >100:1 positive-to-false ratio and 35% accident-free mileage gain directly to the 1B-trained student after applying Noise-Aware Decoupling and kinematics-gated pseudo-labeling with teacher conflict penalty, yet provides no description of how false activations were labeled in production, how exposure time or mileage was matched between the learned and rule-only fleets, or any ablation isolating the conflict penalty versus other production changes. This attribution is load-bearing for the headline result.
- [Abstract] Abstract: no statistical tests, confidence intervals, or controls for confounding factors (fleet composition, driver adaptation, post-processing) are mentioned for the 35% mileage improvement, leaving open the possibility that observed gains arise from unmentioned factors rather than the claimed mechanisms.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback emphasizing the need for clearer methodological details and statistical support in the abstract's claims about production deployment. We respond point-by-point below and will revise the manuscript to improve transparency on validation procedures while preserving the reported results.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim attributes the >100:1 positive-to-false ratio and 35% accident-free mileage gain directly to the 1B-trained student after applying Noise-Aware Decoupling and kinematics-gated pseudo-labeling with teacher conflict penalty, yet provides no description of how false activations were labeled in production, how exposure time or mileage was matched between the learned and rule-only fleets, or any ablation isolating the conflict penalty versus other production changes. This attribution is load-bearing for the headline result.
Authors: We agree that the abstract lacks sufficient detail on these aspects of the production validation. In the revised manuscript we will expand both the abstract and the deployment results section to describe the false-activation labeling process (multi-sensor cross-verification combined with driver-intervention logs and post-drive telemetry review) and the mileage-matching procedure (cohort selection by vehicle type, region, and operational profile with normalization by driven distance). For isolating the conflict penalty, full production ablations are constrained by staged safety rollouts; however, we will add references to offline scaling experiments that quantify its contribution to reducing mismatch hallucinations. These additions will strengthen the attribution without altering the core claims. revision: yes
-
Referee: [Abstract] Abstract: no statistical tests, confidence intervals, or controls for confounding factors (fleet composition, driver adaptation, post-processing) are mentioned for the 35% mileage improvement, leaving open the possibility that observed gains arise from unmentioned factors rather than the claimed mechanisms.
Authors: We concur that statistical rigor and explicit controls are needed. The revised version will report bootstrap confidence intervals for the mileage metric and describe controls for fleet composition via stratified sampling across comparable vehicle cohorts. Post-processing standardization will be noted as applied uniformly. Driver adaptation remains difficult to isolate in live fleets and will be acknowledged as a limitation. These elements will be incorporated into the abstract and results section. revision: yes
Circularity Check
No circularity: empirical deployment metrics against external baseline
full rationale
The paper reports measured safety metrics (positive-to-false ratio >100:1, 35% accident-free mileage gain) on 10^9 km of real fleet data for a deployed 1B-parameter student model versus a production rule-only baseline. No equations, predictions, or first-principles derivations are present that reduce by construction to fitted parameters, self-citations, or ansatzes defined within the paper. The MF-SSL stabilizations (Noise-Aware Decoupling, kinematics-gated pseudo-labeling) are presented as design choices whose effect is assessed via held-out empirical comparison, not via self-referential definitions.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A small labeled anchor set supplies unbiased safety-critical feedback for teacher updates.
invented entities (2)
-
Noise-Aware Decoupling
no independent evidence
-
kinematics-gated pseudo-labeling with teacher conflict penalty
no independent evidence
Reference graph
Works this paper leans on
-
[1]
A systematic review of autonomous emergency braking system: impact factor, technology, and performance evaluation,
L. Yang, Y . Yang, G. Wu, X. Zhao, S. Fang, X. Liao, R. Wang, and M. Zhang, “A systematic review of autonomous emergency braking system: impact factor, technology, and performance evaluation,”J. Adv. Transp., vol. 2022, no. 1, p. 1188089, 2022
2022
-
[2]
Euro NCAP aeb car- to-car test protocol, version 4.2,
European New Car Assessment Programme, “Euro NCAP aeb car- to-car test protocol, version 4.2,” European New Car Assessment Programme,” Test Protocol, 2023, accessed: August 18, 2025
2023
-
[3]
Real-world benefits of crash avoidance technology,
Insurance Institute for Highway Safety - Highway Loss Data Institute, “Real-world benefits of crash avoidance technology,” Insurance Insti- tute for Highway Safety - Highway Loss Data Institute, Arlington, Technical Report, 2025, accessed: March 2, 2026
2025
-
[4]
(2022) Pedestrian crash avoid- ance systems cut crashes – but not in the dark
Insurance Institute for Highway Safety. (2022) Pedestrian crash avoid- ance systems cut crashes – but not in the dark. Accessed: March 2, 2026
2022
-
[5]
Association between automatic emergency braking and pedestrian and cyclist injury severity in japan,
H. Inada and M. Ichikawa, “Association between automatic emergency braking and pedestrian and cyclist injury severity in japan,”Accident Analysis & Prevention, vol. 198, p. 107562, 2025
2025
-
[6]
Federal motor vehi- cle safety standard for automatic emergency braking (aeb) and pedes- trian aeb (paeb),
National Highway Traffic Safety Administration, “Federal motor vehi- cle safety standard for automatic emergency braking (aeb) and pedes- trian aeb (paeb),” U.S. Department of Transportation, Washington, Federal Motor Vehicle Safety Standard, 2023, accessed: March 2, 2026
2023
-
[7]
Assessment protocol: Safe driving vehicle assistance v10.3,
European New Car Assessment Programme, “Assessment protocol: Safe driving vehicle assistance v10.3,” European New Car Assess- ment Programme Secretariat, Brussels, Assessment Protocol, 2023, accessed: March 2, 2026
2023
-
[8]
A situation and threat assessment algorithm for a rear-end collision avoidance system,
M. Brannstrom, J. Sjoberg, and E. Coelingh, “A situation and threat assessment algorithm for a rear-end collision avoidance system,” in IV. IEEE, 2008, pp. 102–107
2008
-
[9]
A theory of visual control of braking based on information about time-to-collision,
D. N. Lee, “A theory of visual control of braking based on information about time-to-collision,”Perception, vol. 5, no. 4, pp. 437–459, 1976
1976
-
[10]
Deep learning based automated braking decision-making for advanced driver assistance system,
C. Razeena and P. Simon, “Deep learning based automated braking decision-making for advanced driver assistance system,”Procedia Comput. Sci., vol. 258, pp. 552–562, 2025
2025
-
[11]
Safe reinforcement learning on autonomous vehicles,
D. Isele, A. Nakhaei, and K. Fujimura, “Safe reinforcement learning on autonomous vehicles,” inIROS. IEEE, 2018, pp. 1–6
2018
-
[12]
Autonomous braking system via deep reinforcement learning,
H. Chae, C. M. Kang, B. Kim, J. Kim, C. C. Chung, and J. W. Choi, “Autonomous braking system via deep reinforcement learning,” inITSC. IEEE, 2017, pp. 1–6
2017
-
[13]
Self-training with noisy student improves imagenet classification,
Q. Xie, M.-T. Luong, E. Hovy, and Q. V . Le, “Self-training with noisy student improves imagenet classification,” inCVPR, 2020, pp. 10 687– 10 698
2020
-
[14]
Meta pseudo labels,
H. Pham, Z. Dai, Q. Xie, and Q. V . Le, “Meta pseudo labels,” in CVPR, June 2021, pp. 11 557–11 568
2021
-
[15]
Development of autonomous emergency braking control system based on road friction,
I.-C. Han, B.-C. Luan, and F.-C. Hsieh, “Development of autonomous emergency braking control system based on road friction,” inCASE. IEEE, 2014, pp. 933–937
2014
-
[16]
Dttcnet: Time-to-collision estimation with autonomous emergency braking us- ing multi-scale transformer network,
X. Teng, S. Xu, D. Guo, Y . Guo, W. Meng, and X. Zhang, “Dttcnet: Time-to-collision estimation with autonomous emergency braking us- ing multi-scale transformer network,”IEEE TMC, 2024
2024
-
[17]
W. Zhang, P. Li, J. Wang, B. Sun, Q. Jin, G. Bao, S. Rui, Y . Yu, W. Ding, P. Li,et al., “Dual-aeb: Synergizing rule-based and multi- modal large language models for effective emergency braking,”arXiv preprint arXiv:2410.08616, 2024
arXiv 2024
-
[18]
Pseudo-label: The simple and efficient semi- supervised learning method for deep neural networks,
D.-H. Leeet al., “Pseudo-label: The simple and efficient semi- supervised learning method for deep neural networks,” inICML Workshop on Challenges in Representation Learning, vol. 3, no. 2. Atlanta, 2013, p. 896
2013
-
[19]
Learning from spatio-temporal cor- relation for semi-supervised lidar semantic segmentation,
S. Lee, H. Lee, and H. Shim, “Learning from spatio-temporal cor- relation for semi-supervised lidar semantic segmentation,” inIROS. IEEE, 2024, pp. 14 095–14 102
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.