Pareto Q-Learning with Reward Machines
Pith reviewed 2026-06-26 21:05 UTC · model grok-4.3
The pith
PQLRM integrates Pareto Q-Learning with Reward Machines for sample-efficient multi-policy learning under non-Markovian rewards.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
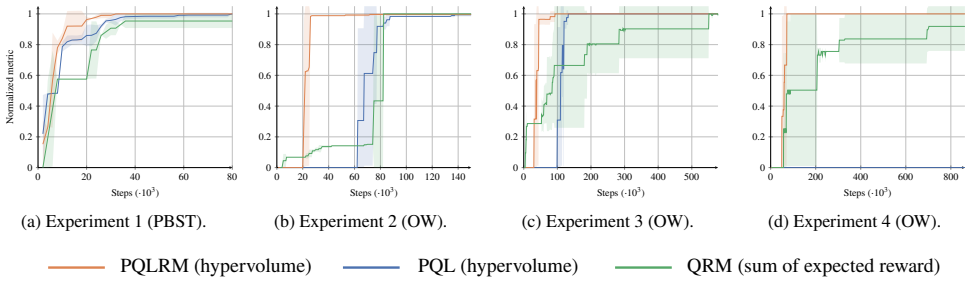
PQLRM yields a multi-policy algorithm that remains sample-efficient under non-Markovian, RM-encoded rewards by maintaining sets of vector-valued Q-estimates while exploiting the factored automaton structure of the reward signal, converging faster than a naive PQL baseline on the cross-product MDP and synthesizing Pareto-optimal policies that QRM cannot.
What carries the argument
Maintenance of sets of vector-valued Q-estimates inside the factored automaton structure supplied by reward machines.
If this is right
- PQLRM can approximate Pareto fronts in environments whose rewards are specified by automata without expanding the full product state space.
- The method recovers multiple policies for tasks where single-policy QRM returns only one or none.
- Sample efficiency gains hold for any reward machine whose automaton can be synchronized with the underlying MDP transitions.
Where Pith is reading between the lines
- The same combination might extend to other set-based or distributional RL methods that track multiple value estimates.
- Tasks with naturally occurring history dependence, such as navigation with memory of past goals, become more tractable under this framing.
- One could test whether the approach scales when the number of objectives grows while the reward machine remains small.
Load-bearing premise
The factored automaton structure from reward machines can be directly exploited within the Pareto Q-Learning framework to preserve Pareto front approximation quality while gaining sample efficiency, without introducing new approximation errors that offset the claimed gains.
What would settle it
An experiment in which PQLRM applied to RM-specified tasks shows no faster convergence than naive PQL on the cross-product MDP and fails to recover any additional Pareto-optimal policies beyond those found by QRM.
Figures
read the original abstract
We present Pareto Q-Learning with Reward Machines (PQLRM), a multi-objective reinforcement learning algorithm for tasks whose reward structure is specified by a set of reward machines (RMs). PQLRM combines Pareto Q-Learning (PQL), which maintains sets of vector-valued Q-estimates to approximate the Pareto front, with enhancements from Q-Learning with Reward Machines (QRM), which exploits the factored automaton structure of the reward signal. This yields a multi-policy algorithm that remains sample-efficient under non-Markovian, RM-encoded rewards. Experimental trials show that PQLRM converges faster than a naive PQL baseline applied to the cross-product MDP and can synthesize Pareto-optimal policies that QRM cannot.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Pareto Q-Learning with Reward Machines (PQLRM), a multi-objective reinforcement learning algorithm that combines Pareto Q-Learning (PQL) for maintaining sets of vector-valued Q-estimates to approximate the Pareto front with enhancements from Q-Learning with Reward Machines (QRM) to exploit the factored automaton structure of RM-encoded rewards. It claims this produces a sample-efficient multi-policy algorithm for non-Markovian rewards that converges faster than naive PQL on the cross-product MDP and synthesizes Pareto-optimal policies unreachable by QRM.
Significance. If the claims hold, the work would meaningfully extend multi-objective RL to non-Markovian settings with automaton-specified rewards by preserving Pareto-front quality while improving sample efficiency, addressing a practical gap between single-policy RM methods and multi-policy Pareto methods.
major comments (2)
- Abstract: the manuscript claims experimental superiority (faster convergence than naive PQL and policies beyond QRM) but supplies no quantitative results, error bars, baseline details, or experiment descriptions, leaving the central empirical claim without verifiable support.
- Abstract: no equations, update rules, or description of how the factored RM automaton structure is integrated into the PQL vector-valued Q-maintenance are provided, preventing assessment of whether the claimed exploitation preserves front approximation quality without offsetting approximation errors.
Simulated Author's Rebuttal
We thank the referee for their constructive comments. We address each major comment below.
read point-by-point responses
-
Referee: Abstract: the manuscript claims experimental superiority (faster convergence than naive PQL and policies beyond QRM) but supplies no quantitative results, error bars, baseline details, or experiment descriptions, leaving the central empirical claim without verifiable support.
Authors: The abstract serves as a high-level overview of the contributions. Detailed quantitative experimental results, including convergence curves with error bars, baseline comparisons, and experiment descriptions, are provided in the Experiments section of the full manuscript. To improve the abstract's informativeness and address this concern, we will revise it to include key quantitative highlights from our results. revision: yes
-
Referee: Abstract: no equations, update rules, or description of how the factored RM automaton structure is integrated into the PQL vector-valued Q-maintenance are provided, preventing assessment of whether the claimed exploitation preserves front approximation quality without offsetting approximation errors.
Authors: We acknowledge that the abstract does not include technical details such as equations or update rules. These are presented in Section 3 of the manuscript, where we describe the integration of the RM automaton structure into the Pareto Q-maintenance and provide the relevant update rules. We will revise the abstract to include a brief description of this integration to allow for better assessment of the approach's properties. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper presents PQLRM as a synthesis of two independently published algorithms (Pareto Q-Learning and Q-Learning with Reward Machines). The central claim—that the factored RM automaton structure can be exploited inside the PQL framework to retain Pareto-front quality while improving sample efficiency—is framed as a direct algorithmic combination rather than a reduction to any fitted parameter, self-defined quantity, or self-citation chain. No equations or update rules in the provided text equate a derived result to its own inputs by construction, and the experimental comparisons are described as external validation against baselines. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Standard Q-learning convergence assumptions hold in the cross-product MDP induced by reward machines
- domain assumption The automaton structure of reward machines can be exploited without degrading Pareto front approximation
Reference graph
Works this paper leans on
-
[1]
What regularized auto-encoders learn from the data-generating distribution.J
Kristof Van Moffaert and Ann Now. Multi-objective reinforcement learning using sets of pareto dominating policies , journal =. 2014 , url =. doi:10.5555/2627435.2750356 , timestamp =
-
[2]
Felten, Florian and Alegre, Lucas N. and Now. A Toolkit for Reliable Benchmarking and Research in Multi-Objective Reinforcement Learning , booktitle =
-
[3]
Machine learning , volume=
Q-learning , author=. Machine learning , volume=. 1992 , publisher=
1992
-
[4]
and Valenzano, Richard and McIlraith, Sheila A
Toro Icarte, Rodrigo and Klassen, Toryn Q. and Valenzano, Richard and McIlraith, Sheila A. , title =. Proceedings of the 35th International Conference on Machine Learning (ICML) , year =
-
[5]
Learning all optimal policies with multiple criteria , booktitle =
Leon Barrett and Srini Narayanan , editor =. Learning all optimal policies with multiple criteria , booktitle =. 2008 , url =. doi:10.1145/1390156.1390162 , timestamp =
-
[6]
Evolutionary computation , volume=
HypE: An algorithm for fast hypervolume-based many-objective optimization , author=. Evolutionary computation , volume=. 2011 , publisher=
2011
-
[7]
Journal of Artificial Intelligence Research , volume=
A survey of multi-objective sequential decision-making , author=. Journal of Artificial Intelligence Research , volume=
-
[8]
Autonomous Agents and Multi-Agent Systems , volume=
A practical guide to multi-objective reinforcement learning and planning , author=. Autonomous Agents and Multi-Agent Systems , volume=. 2022 , publisher=
2022
-
[9]
and de Jong, Edwin D
Wiering, Marco A. and de Jong, Edwin D. , booktitle=. Computing Optimal Stationary Policies for Multi-Objective Markov Decision Processes , year=
-
[10]
Sutton and Andrew G
Richard S. Sutton and Andrew G. Barto , title =. 2018 , url =
2018
-
[11]
The deterministic part of the seventh International Planning Competition , journal =
Carlos Linares L. The deterministic part of the seventh International Planning Competition , journal =. 2015 , url =. doi:10.1016/J.ARTINT.2015.01.004 , timestamp =
-
[12]
Agent57: Outperforming the
Adri. Agent57: Outperforming the. Proceedings of the 37th International Conference on Machine Learning (ICML) , year =
-
[13]
Spatial-Temporal Traffic Flow Control on Motorways Using Distributed Multi-Agent Reinforcement Learning , journal =
Kre. Spatial-Temporal Traffic Flow Control on Motorways Using Distributed Multi-Agent Reinforcement Learning , journal =
-
[14]
IEEE Consumer Communications and Networking Conference (CCNC) , year =
Babatunji Omoniwa and Boris Galkin and Ivana Dusparic , title =. IEEE Consumer Communications and Networking Conference (CCNC) , year =
-
[15]
Real Robot Challenge 2022: Learning Dexterous Manipulation from Offline Data in the Real World , booktitle =
Nico G. Real Robot Challenge 2022: Learning Dexterous Manipulation from Offline Data in the Real World , booktitle =. 2023 , publisher =
2022
-
[16]
Terry and John U
Mark Towers and Ariel Kwiatkowski and Jordan K. Terry and John U. Balis and Gianluca De Cola and Tristan Deleu and Manuel Goul. Gymnasium: A Standard Interface for Reinforcement Learning Environments , journal =. 2024 , doi =
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.