A Geometric Solution of the Schr\"odinger Bridge Problem on mathsf{SO}(2) via Stochastic Optimal Control
Pith reviewed 2026-06-26 09:35 UTC · model grok-4.3
The pith
A fixed-point recursion for the Schrödinger system on SO(2) is contractive in the Hilbert projective metric, proving existence and uniqueness of the bridge.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Existence and uniqueness of a solution to the Schrödinger system on SO(2) follows from showing that a fixed-point recursion is contractive in the complete metric space of continuous strictly positive densities equipped with the Hilbert projective metric, which directly yields the optimal geometric controller for the bridge problem.
What carries the argument
The fixed-point recursion on the Schrödinger system of equations, proven contractive under the Hilbert projective metric.
If this is right
- The optimal controller steers any initial density to any terminal density using only angular velocity inputs that respect the group geometry.
- The solution avoids coordinate embedding of SO(2) into the plane and remains intrinsic to the Lie group structure.
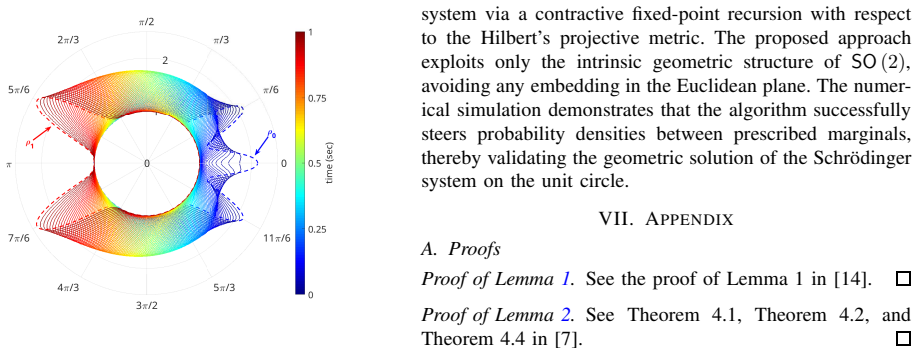
- Numerical evolution of the densities between the prescribed marginals confirms the theoretical bridge construction.
- The same contractivity argument guarantees uniqueness for every admissible pair of boundary densities.
Where Pith is reading between the lines
- The same contraction-mapping technique could be tested on Schrödinger bridges for other compact Lie groups such as SO(3).
- Hilbert projective metric arguments may simplify uniqueness proofs for related density-control problems on manifolds.
- The intrinsic controller design suggests direct applicability to systems whose states are already rotations without needing auxiliary coordinates.
Load-bearing premise
The initial and terminal probability density functions defined on SO(2) are continuous and strictly positive.
What would settle it
A pair of continuous strictly positive densities on SO(2) for which the fixed-point recursion either fails to converge or produces more than one limit point satisfying the Schrödinger system.
Figures
read the original abstract
We present a geometric coordinate-free solution to the isotropic Schr\"odinger bridge problem (SBP) for the kinematic equation on the Lie group $\mathsf{SO}(2)$. We consider the angular velocity of the system as the control input and assume that the given initial and terminal state probability density functions defined on $\mathsf{SO}(2)$ in our SBP are continuous and strictly positive. We solve the SBP by proving the existence and uniqueness of a solution to the so-called Schr\"odinger system of equations on $\mathsf{SO}(2)$, by showing that a fixed-point recursion is contractive in a complete metric space with respect to the Hilbert's projective metric. The geometric controller thus designed only uses the intrinsic geometric structure of $\mathsf{SO}(2)$ and does not embed it in the Euclidean plane to achieve the optimal density control. The numerical simulation verifies the validity of the theoretical construction of the Schr\"odinger bridge. The code and animations are publicly available at \texttt{\href{https://gitlab.com/a5akhtar/sbp}{https://gitlab.com/a5akhtar/sbp}}.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a coordinate-free geometric solution to the isotropic Schrödinger bridge problem (SBP) on the Lie group SO(2) formulated as a stochastic optimal control problem with angular velocity as the control input. Under the assumption that the prescribed initial and terminal probability densities on SO(2) are continuous and strictly positive, existence and uniqueness of a solution to the associated Schrödinger system are established by proving that an associated fixed-point recursion is contractive on the cone of positive continuous functions equipped with Hilbert's projective metric; the resulting controller is intrinsic to the geometry of SO(2). Numerical simulations confirm the construction, and the implementation code is made publicly available.
Significance. If the contractivity argument and completeness of the underlying metric space hold, the work supplies an intrinsic geometric method for solving the SBP on a compact Lie group without Euclidean embedding, extending techniques from optimal transport and geometric control. The explicit use of Hilbert's projective metric to obtain a contraction, together with the open-source code and animations, strengthens reproducibility and provides a concrete template that could be adapted to other matrix Lie groups.
minor comments (3)
- The abstract and introduction state that the fixed-point map is contractive, but the explicit value or bound on the contraction constant (or the number of iterations needed for a given tolerance) is not reported in the numerical section; adding this would make the practical convergence rate clearer.
- Notation for the Hilbert projective metric and the cone of positive functions should be introduced once in a dedicated preliminary subsection rather than inline, to improve readability for readers unfamiliar with the projective metric.
- Figure captions could explicitly state the discretization parameters (number of grid points on SO(2), time-step size) used to generate the plotted densities, so that the simulations are fully reproducible from the caption alone.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of the manuscript, the detailed summary, and the recommendation for minor revision. No major comments were listed in the report.
Circularity Check
No significant circularity
full rationale
The paper's central claim is an existence/uniqueness proof for the Schrödinger system on SO(2) obtained by establishing contractivity of a fixed-point recursion in the Hilbert projective metric on the cone of positive continuous functions. This rests on standard fixed-point theory (Banach or Birkhoff) applied to a complete metric space under the stated assumptions of continuous strictly positive densities; those assumptions are the usual conditions that make the projective metric well-defined and keep iterates interior to the cone. No step reduces by definition to its own output, no fitted parameter is relabeled as a prediction, and no load-bearing premise is justified solely by a self-citation chain. The derivation is therefore self-contained against external mathematical benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Hilbert's projective metric renders the relevant function space complete
- domain assumption Initial and terminal densities are continuous and strictly positive
Reference graph
Works this paper leans on
-
[1]
Proba bilistic and distributed control of a large-scale swarm of autonomou s agents,
S. Bandyopadhyay, S.-J. Chung, and F. Y . Hadaegh, “Proba bilistic and distributed control of a large-scale swarm of autonomou s agents,” IEEE Transactions on Robotics , vol. 33, no. 5, pp. 1103–1123, 2017
2017
-
[2]
Traffic density control for automated highway systems,
C.-C. Chien, Y . Zhang, and P . A. Ioannou, “Traffic density control for automated highway systems,” Automatica, vol. 33, no. 7, pp. 1273– 1285, 1997
1997
-
[3]
Finite horizon density steer ing for multi- input state feedback linearizable systems,
K. F. Caluya and A. Halder, “Finite horizon density steer ing for multi- input state feedback linearizable systems,” in 2020 American Control Conference (ACC). IEEE, 2020, pp. 3577–3582
2020
-
[4]
The Markov processes of Schr¨ odinger,
B. Jamison, “The Markov processes of Schr¨ odinger,” Probability Theory and Related Fields , vol. 32, no. 4, pp. 323–331, 1975
1975
-
[5]
On the relation bet ween optimal transport and Schr¨ odinger bridges: A stochastic c ontrol view- point,
Y . Chen, T. T. Georgiou, and M. Pavon, “On the relation bet ween optimal transport and Schr¨ odinger bridges: A stochastic c ontrol view- point,” Journal of Optimization Theory and Applications , vol. 169, no. 2, pp. 671–691, 2016
2016
-
[6]
E. P . Hsu, Stochastic Analysis on Manifolds . American Mathematical Soc., 2002, no. 38
2002
-
[7]
Hilbert’s metric and positive contracti on mappings in a Banach space,
P . J. Bushell, “Hilbert’s metric and positive contracti on mappings in a Banach space,” Archive for Rational Mechanics and Analysis , vol. 52, no. 4, pp. 330–338, 1973
1973
-
[8]
Wasserstein Proximal Algori thms for the Schr¨ odinger Bridge Problem: Density Control With Nonline ar Drift,
K. F. Caluya and A. Halder, “Wasserstein Proximal Algori thms for the Schr¨ odinger Bridge Problem: Density Control With Nonline ar Drift,” IEEE Transactions on Automatic Control , vol. 67, no. 3, pp. 1163– 1178, 2022
2022
-
[9]
J. Q. Gallier and J. Quaintance, Differential Geometry and Lie Groups . Springer, 2020, vol. 12
2020
-
[10]
Oksendal, Stochastic Differential Equations: An Introduction with Applications
B. Oksendal, Stochastic Differential Equations: An Introduction with Applications. Springer Science & Business Media, 2013
2013
-
[11]
Faraut, Analysis on Lie Groups: An Introduction , ser
J. Faraut, Analysis on Lie Groups: An Introduction , ser. Cambridge Studies in Advanced Mathematics. Cambridge: Cambridge Uni versity Press, 2008
2008
-
[12]
Grigor’yan, Heat Kernel and Analysis on Manifolds
A. Grigor’yan, Heat Kernel and Analysis on Manifolds . American Mathematical Society, 2012
2012
-
[13]
Chapter 52 - The interplay between compa ct spaces and the Banach spaces of their continuous functions,
P . Koszmider, “Chapter 52 - The interplay between compa ct spaces and the Banach spaces of their continuous functions,” in Open Problems in Topology II, E. Pearl, Ed. Amsterdam: Elsevier, 2007, pp. 567–580
2007
-
[14]
Schr¨ odinger Bri dge Over A Compact Connected Lie Group,
H. Mahmood, A. Halder, and A. Akhtar, “Schr¨ odinger Bri dge Over A Compact Connected Lie Group,” 2026. [Online]. Availa ble: https://arxiv.org/abs/2603.14049
-
[15]
Entropic and displa cement interpolation: a computational approach using the Hilbert metric,
Y . Chen, T. Georgiou, and M. Pavon, “Entropic and displa cement interpolation: a computational approach using the Hilbert metric,” SIAM Journal on Applied Mathematics , vol. 76, no. 6, pp. 2375–2396, 2016
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.