Path-following Control of a Quadrotor using Quasi-Static Transverse Feedback Linearization
Pith reviewed 2026-06-26 07:45 UTC · model grok-4.3
The pith
Quasi-static transverse feedback linearization renders a quadrotor's path-following manifold invariant and locally exponentially stable without extra controller states.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The QSTFL controller renders the path-following manifold invariant, ensuring trajectories initialized on the path remain on it for all future time, while regulating tangential velocity and yaw; a diffeomorphic coordinate transformation is established and local exponential stability of the path-following manifold is proved, with closed-form expressions for thrust and torque inputs requiring inversion of only a 3x3 decoupling matrix.
What carries the argument
Quasi-static transverse feedback linearization of the transverse dynamics to the path-following manifold, which produces an invariant manifold without dynamic extension.
If this is right
- Trajectories that begin exactly on the path stay on it for all future time.
- Tangential speed and yaw converge to their commanded values while the vehicle remains on the path.
- Thrust is obtained by direct algebraic evaluation of the state, removing any need to measure or estimate its derivative.
- The control law inverts a 3x3 matrix instead of a 4x4 matrix, reducing the number of arithmetic operations at each step.
- Local exponential stability of the manifold holds inside some neighborhood whose size is determined by the linearization.
Where Pith is reading between the lines
- The algebraic thrust formula may reduce the sensor suite needed compared with methods that differentiate thrust.
- The same quasi-static construction could be tried on other underactuated rigid-body systems whose output dimension matches the number of controls after the transverse linearization.
- Because the manifold is invariant, initial errors transverse to the path may be driven to zero without separate capture logic.
- The method's reliance on an exact diffeomorphism suggests that model mismatch will primarily affect the size of the region of attraction rather than destroy invariance outright.
Load-bearing premise
The quadrotor model together with the chosen path admits a diffeomorphic coordinate change that lets the transverse dynamics be linearized without adding controller states.
What would settle it
A closed-loop simulation started exactly on the path in which the distance to the path grows away from zero would falsify the invariance claim.
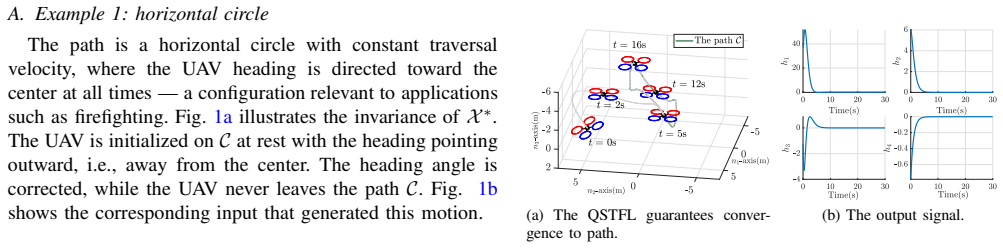
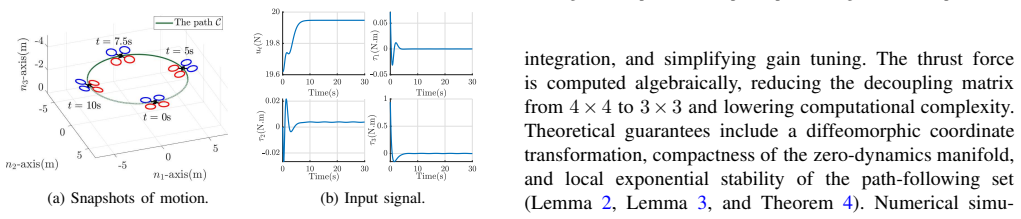
Figures
read the original abstract
We propose a quasi-static transverse feedback linearization (QSTFL) controller for a quadrotor to follow a prescribed geometric path, rather than a time-parameterized trajectory. In contrast to existing dynamic-feedback approaches, the controller does not introduce additional controller states. The thrust input is computed algebraically from the current state, eliminating the need for thrust-derivative measurements and numerical integration. The proposed design renders the path-following manifold invariant, ensuring that trajectories initialized on the path remain on it for all future time, while simultaneously regulating tangential velocity and yaw. We establish a diffeomorphic coordinate transformation and prove local exponential stability of the path-following manifold. In addition, closed-form expressions are derived for the thrust and torque inputs. Compared with dynamic-feedback constructions, the controller requires inversion of only a $3\times 3$ decoupling matrix rather than a $4\times 4$ one, leading to a simpler control law and reduced computational complexity. Numerical simulations demonstrate the effectiveness of the proposed method. Code and animations are publicly available at \footnotesize{\texttt{\href{https://gitlab.com/a5akhtar/quasistatic-tfl-uav/}{https://gitlab.com/a5akhtar/quasistatic-tfl-uav/}}}.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a quasi-static transverse feedback linearization (QSTFL) controller for quadrotor geometric path-following. It asserts that a diffeomorphic coordinate transformation exists allowing the path-following manifold to be rendered invariant without dynamic extension or additional states, that local exponential stability of the manifold can be proved while regulating tangential velocity and yaw, and that closed-form thrust and torque inputs are obtained via algebraic computation requiring inversion of only a 3x3 decoupling matrix (versus 4x4 in dynamic-feedback methods). Effectiveness is illustrated via numerical simulations with publicly available code.
Significance. If the diffeomorphism and stability results hold under the paper's conditions, the approach offers a simpler control law for underactuated UAV path-following by eliminating dynamic extension, thrust-derivative measurements, and higher-dimensional matrix inversions. Public release of code and animations is a positive contribution to reproducibility.
major comments (2)
- [Abstract / coordinate transformation derivation] Abstract and coordinate transformation section: the central claim that the quadrotor 6-DOF dynamics plus chosen path admit a diffeomorphism enabling QSTFL (no dynamic extension, 3x3 decoupling matrix always invertible) is load-bearing for manifold invariance and the local exponential stability proof. The manuscript must explicitly state and verify the relative-degree conditions, path curvature bounds, and rank conditions on the decoupling matrix; without these, the algebraic thrust expression and transverse linearization may fail for generic paths, as is typical for underactuated rigid-body systems.
- [Stability proof] Stability analysis: the proof of local exponential stability of the path-following manifold is asserted via the diffeomorphic change of coordinates, but the transverse error dynamics, the precise form of the feedback, and any assumptions on initial conditions or path regularity are not detailed enough in the provided material to confirm that the closed-loop transverse subsystem is indeed exponentially stable independently of the tangential dynamics.
minor comments (1)
- The public code repository link is helpful; consider adding a brief comparison table (e.g., matrix dimensions, number of controller states, required measurements) against a representative dynamic-feedback TFL method to quantify the claimed reduction in complexity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will incorporate clarifications and expansions in a revised version to strengthen the presentation of the coordinate transformation and stability results.
read point-by-point responses
-
Referee: [Abstract / coordinate transformation derivation] Abstract and coordinate transformation section: the central claim that the quadrotor 6-DOF dynamics plus chosen path admit a diffeomorphism enabling QSTFL (no dynamic extension, 3x3 decoupling matrix always invertible) is load-bearing for manifold invariance and the local exponential stability proof. The manuscript must explicitly state and verify the relative-degree conditions, path curvature bounds, and rank conditions on the decoupling matrix; without these, the algebraic thrust expression and transverse linearization may fail for generic paths, as is typical for underactuated rigid-body systems.
Authors: We agree that the diffeomorphism and decoupling-matrix invertibility require explicit conditions. The current manuscript assumes sufficient path smoothness (C^4) and bounded curvature to ensure the transverse coordinates are well-defined and the 3x3 matrix remains nonsingular. In the revision we will add a dedicated subsection (or lemma) that (i) states the relative-degree conditions for the chosen outputs, (ii) gives an explicit curvature bound (e.g., |κ| < κ_max derived from vehicle parameters), and (iii) proves that the decoupling matrix has full rank 3 whenever these bounds hold. This will make clear that the algebraic thrust formula and QSTFL construction are valid on the stated class of paths rather than on completely arbitrary curves. revision: yes
-
Referee: [Stability proof] Stability analysis: the proof of local exponential stability of the path-following manifold is asserted via the diffeomorphic change of coordinates, but the transverse error dynamics, the precise form of the feedback, and any assumptions on initial conditions or path regularity are not detailed enough in the provided material to confirm that the closed-loop transverse subsystem is indeed exponentially stable independently of the tangential dynamics.
Authors: The stability argument proceeds by exhibiting a diffeomorphism that decouples the transverse and tangential subsystems; the transverse error dynamics are then rendered exponentially stable by a linear feedback whose gain is chosen from the controllability of the linearized transverse system. The tangential velocity and yaw are regulated separately on the manifold. To address the concern about insufficient detail, the revised manuscript will expand the stability section to include: (a) the explicit coordinate transformation and its inverse, (b) the closed-form expression for the transverse feedback, (c) the resulting linear transverse error system, and (d) the precise assumptions (initial conditions inside a neighborhood of the manifold and path regularity C^4). These additions will confirm that exponential stability of the transverse subsystem holds independently of the tangential dynamics. revision: yes
Circularity Check
No significant circularity; derivation is self-contained via stated proofs
full rationale
The paper's central claims rest on establishing a diffeomorphic coordinate transformation, proving local exponential stability of the path-following manifold, and deriving closed-form thrust/torque expressions via quasi-static transverse feedback linearization applied to the quadrotor model. These steps are presented as direct mathematical constructions from the system dynamics and path geometry, without any reduction of predictions to fitted parameters, self-definitional loops, or load-bearing self-citations. The abstract explicitly contrasts the approach with dynamic-feedback methods and notes the 3x3 decoupling matrix inversion as a simplification, but provides no evidence that the diffeomorphism or invariance results are assumed or imported circularly. The derivation chain is therefore independent and self-contained against external benchmarks such as the underlying rigid-body dynamics.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The quadrotor dynamics and path admit a diffeomorphic coordinate transformation enabling quasi-static transverse feedback linearization
Reference graph
Works this paper leans on
-
[1]
Path followi ng for a quadrotor using dynamic extension and transverse feedback lineariza- tion,
A. Akhtar, S. L. Waslander, and C. Nielsen, “Path followi ng for a quadrotor using dynamic extension and transverse feedback lineariza- tion,” in Proc. CDC, 2012, pp. 3551 –3556
2012
-
[2]
Multirotor aerial veh icles: Modeling, estimation, and control of quadrotor,
R. Mahony, V . Kumar, and P . Corke, “Multirotor aerial veh icles: Modeling, estimation, and control of quadrotor,” IEEE Robot. Autom. Mag., vol. 19, no. 3, pp. 20–32, 9 2012
2012
-
[3]
A class of position controllers for underactuated VTOL vehicles,
A. Roza and M. Maggiore, “A class of position controllers for underactuated VTOL vehicles,” IEEE Trans. Automat. Contr ., vol. 59, no. 9, pp. 2580–2585, 2014
2014
-
[4]
A survey of path foll owing control strategies for uavs focused on quadrotors,
B. Rub´ ı, R. P´ erez, and B. Morcego, “A survey of path foll owing control strategies for uavs focused on quadrotors,” J. Intell. Robot. Syst., 2019
2019
-
[5]
Position control for a class of v ehicles in SE(3),
A. Roza and M. Maggiore, “Position control for a class of v ehicles in SE(3),” in Proc. CDC, 12 2012, pp. 5631–5636
2012
-
[6]
Path invariance of a qu adrotor system under cyber attacks with theoretical guarantees,
H. Mahmood, U. Ali, and A. Akhtar, “Path invariance of a qu adrotor system under cyber attacks with theoretical guarantees,” i n Proc. ACC, 2025, pp. 972–977
2025
-
[7]
Nonlinear robu st tracking control of a quadrotor UA V on SE(3),
L. Taeyoung, L. Melvin, and M. N. Harris, “Nonlinear robu st tracking control of a quadrotor UA V on SE(3),” Asian J. Cont. , vol. 15, no. 2, pp. 391–408, 2012
2012
-
[8]
Almost global att itude stabilization of an orbiting satellite including gravity g radient and control saturation effects,
N. A. Chaturvedi and N. H. McClamroch, “Almost global att itude stabilization of an orbiting satellite including gravity g radient and control saturation effects,” in Proc. ACC, 2006
2006
-
[9]
P ath following for the PVTOL: A set stabilization approach,
C. Nielsen, L. Consolini, M. Maggiore, and M. Tosques, “P ath following for the PVTOL: A set stabilization approach,” in Proc. CDC, 12 2008, pp. 584 –589
2008
-
[10]
Control of flat systems by qu asi-static feedback of generalized states,
E. Delaleau and J. Rudolph, “Control of flat systems by qu asi-static feedback of generalized states,” Int. J. Cont. , vol. 71, no. 5, pp. 745– 765, 1998
1998
-
[11]
Quasi- static feedback linearization for the translational dynamics of a quadrotor helicopter,
O. Fritsch, P . De Monte, M. Buhl, and B. Lohmann, “Quasi- static feedback linearization for the translational dynamics of a quadrotor helicopter,” in Proc. ACC, 2012, pp. 125–130
2012
-
[12]
Guillemin and A
V . Guillemin and A. Pollack, Differential Topology. Englewood Cliffs NJ: Prentice-Hall, 1974
1974
-
[13]
Schaub and J
H. Schaub and J. Junkins, Analytical mechanics of space systems . American Institute of Aeronautics and Astronautics, 2018
2018
-
[14]
Path following controller for a quadrotor helicopter,
A. Roza and M. Maggiore, “Path following controller for a quadrotor helicopter,” in Proc. ACC. IEEE, 2012, pp. 4655–4660
2012
-
[15]
Isidori, Nonlinear Control Systems, 3rd ed
A. Isidori, Nonlinear Control Systems, 3rd ed. London, UK: Springer, 1995
1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.