WaveForward: An Omnidirectional Passive Wheeled Quadruped Robot with Casters
Pith reviewed 2026-06-25 21:29 UTC · model grok-4.3
The pith
A quadruped robot with passive casters on its legs moves in any direction while cutting transport cost by up to 89.1 percent versus leg-only walking.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Equipping each leg of a quadruped with a standard passive caster, together with an asymmetric actor-critic controller that receives privileged caster angle and velocity data and a velocity-command-driven caster-base posture adjustment, enables omnidirectional locomotion and yields up to an 89.1 percent reduction in cost of transport compared with legged motion alone.
What carries the argument
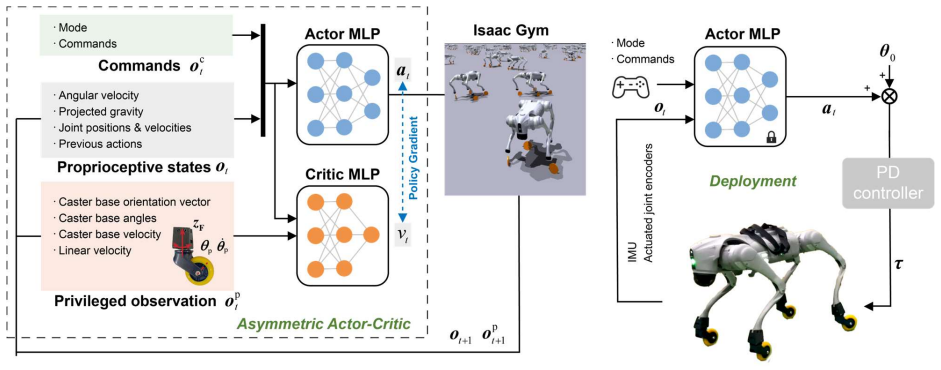
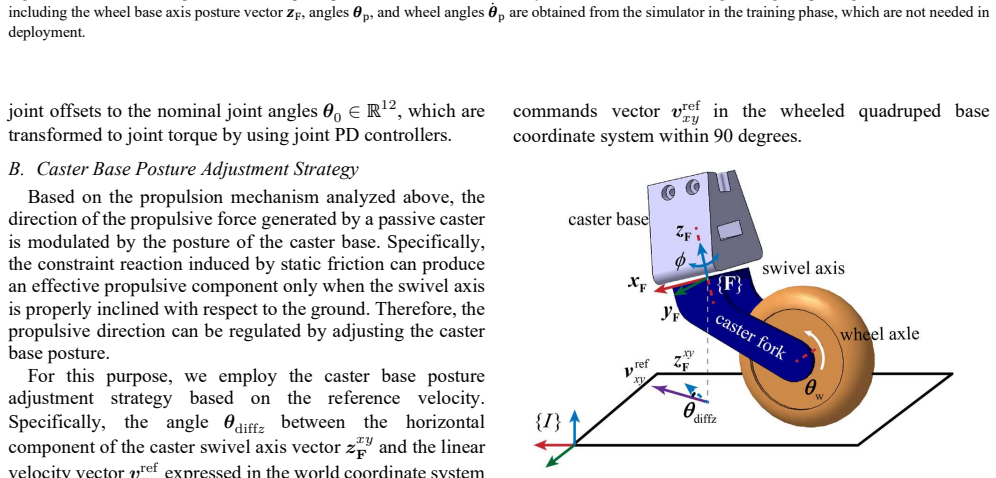
Asymmetric actor-critic controller that ingests privileged caster angles and velocities, paired with a velocity-command-based caster base posture adjustment strategy that reorients the caster axis via actuated joints.
Load-bearing premise
The controller and posture strategy will continue to deliver the reported omnidirectional control and energy savings on real surfaces with varying friction, slopes, and sensor noise without added hardware or parameter changes.
What would settle it
A physical trial on uneven outdoor terrain with changing friction that measures whether the 89.1 percent COT reduction and full omnidirectional capability persist without controller retuning or extra sensors.
Figures


read the original abstract
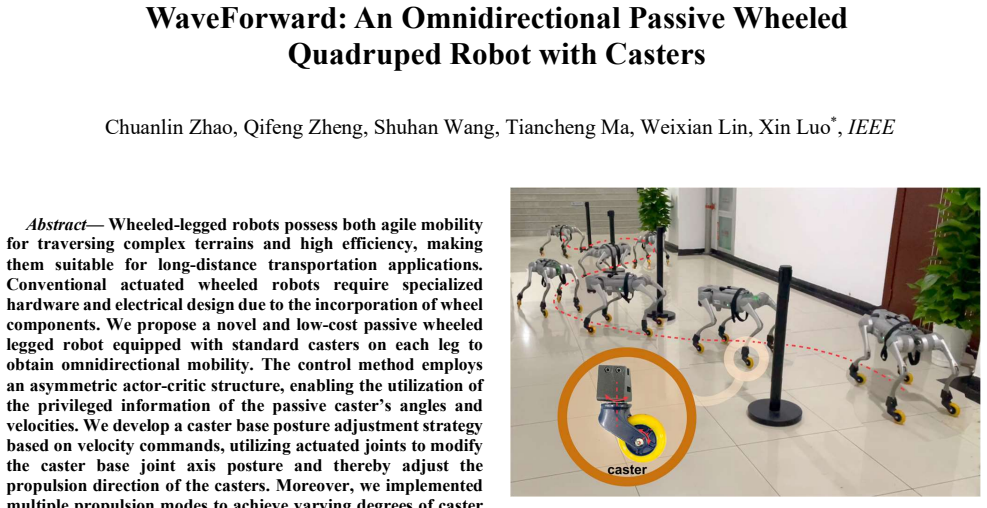
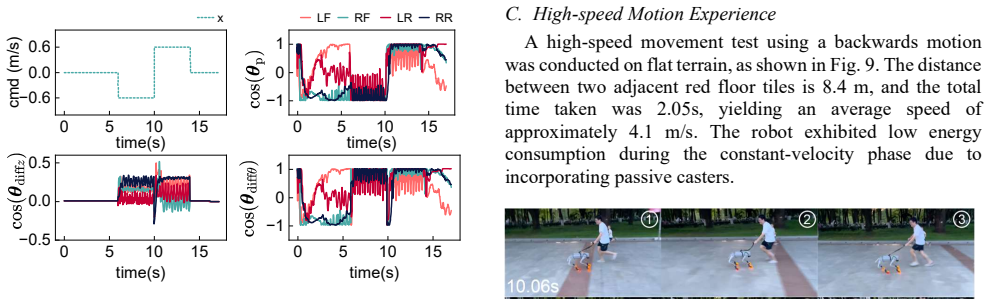
Wheeled-legged robots possess both agile mobility for traversing complex terrains and high efficiency, making them suitable for long-distance transportation applications. Conventional actuated wheeled robots require specialized hardware and electrical design due to the incorporation of wheel components. We propose a novel and low-cost passive wheeled legged robot equipped with standard casters on each leg to obtain omnidirectional mobility. The control method employs an asymmetric actor-critic structure, enabling the utilization of the privileged information of the passive caster's angles and velocities. We develop a caster base posture adjustment strategy based on velocity commands, utilizing actuated joints to modify the caster base joint axis posture and thereby adjust the propulsion direction of the casters. Moreover, we implemented multiple propulsion modes to achieve varying degrees of caster twisting oscillation, converting these into propulsive force. We conducted a slalom test and mode switch experience, which shows the passive wheeled quadruped could achieve omnidirectional movement versatility, and reduce the cost of transport (COT) by up to 89.1% with respect to legged motion.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes WaveForward, a low-cost passive wheeled quadruped robot equipped with standard casters on each leg to enable omnidirectional mobility. Control relies on an asymmetric actor-critic reinforcement learning structure that exploits privileged information on caster angles and velocities, combined with a velocity-command-based caster base posture adjustment strategy and multiple propulsion modes that convert caster twisting oscillation into propulsive force. Slalom and mode-switch tests are reported to demonstrate omnidirectional versatility and up to 89.1% reduction in cost of transport relative to pure legged motion.
Significance. If the quantitative efficiency gains hold on hardware that truly lacks dedicated caster sensors, the combination of passive casters with actuated legs and the described control strategy would represent a practical route to high-efficiency omnidirectional locomotion without specialized wheel actuators, with potential value for long-distance transport tasks.
major comments (2)
- [Abstract] Abstract: the central claim of up to 89.1% COT reduction (and the associated slalom/mode-switch results) is presented without any description of measurement method, baseline legged controller, number of trials, error bars, or statistical significance; these omissions are load-bearing because the performance numbers are the primary evidence offered for the robot's advantage.
- [Control method] Control method description: the asymmetric actor-critic is stated to utilize 'privileged information of the passive caster's angles and velocities,' yet the manuscript provides no account of how these states are obtained or estimated on the low-cost passive platform; because the reported COT gains and omnidirectional behavior rest on this controller, the observability gap directly affects whether the empirical results can be realized on the described hardware.
minor comments (1)
- [Abstract] Abstract: 'mode switch experience' appears to be a typographical error for 'mode switch experiment.'
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight important aspects of clarity in our presentation of results and methods. We address each major comment below and will incorporate revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of up to 89.1% COT reduction (and the associated slalom/mode-switch results) is presented without any description of measurement method, baseline legged controller, number of trials, error bars, or statistical significance; these omissions are load-bearing because the performance numbers are the primary evidence offered for the robot's advantage.
Authors: We agree that the abstract would benefit from additional methodological context to support the reported performance claims. In the revised manuscript, we will expand the abstract to briefly describe the COT measurement approach, the baseline legged controller for comparison, the number of trials, and reference the error bars and statistical details provided in the experimental section of the main text. revision: yes
-
Referee: [Control method] Control method description: the asymmetric actor-critic is stated to utilize 'privileged information of the passive caster's angles and velocities,' yet the manuscript provides no account of how these states are obtained or estimated on the low-cost passive platform; because the reported COT gains and omnidirectional behavior rest on this controller, the observability gap directly affects whether the empirical results can be realized on the described hardware.
Authors: The asymmetric actor-critic utilizes privileged caster state information exclusively during simulation-based training. The deployed policy on hardware relies solely on the robot's proprioceptive sensors and does not require direct caster measurements. We will revise the control method section to explicitly distinguish the training and deployment phases and clarify how the policy achieves the reported results on the passive hardware platform. revision: yes
Circularity Check
No circularity; claims rest on empirical hardware tests
full rationale
The paper introduces a passive caster-equipped quadruped and an asymmetric actor-critic controller plus posture-adjustment strategy. All performance assertions (omnidirectional mobility, up to 89.1% COT reduction versus legged gait) are presented as outcomes of physical slalom and mode-switch experiments rather than any first-principles derivation, fitted parameter renamed as prediction, or self-citation chain. No equations appear that define a quantity in terms of itself or that reduce a claimed result to its own inputs by construction. The work is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard rigid-body dynamics and caster rolling-without-slipping assumptions hold during locomotion
Reference graph
Works this paper leans on
-
[1]
Optimization Based Dynamic Skateboarding of Quadrupedal Robot,
Z. Xu, M. Al-Khulaqui, H. Ma, et al., “Optimization Based Dynamic Skateboarding of Quadrupedal Robot,” 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 8058-8064
2024
-
[2]
Rolling in the Deep - Hybrid Locomotion for Wheeled-Legged Robots Using Online Trajectory Optimization,
M. Bjelonic, P. K. Sankar, C. D. Bellicoso, et al., “Rolling in the Deep - Hybrid Locomotion for Wheeled-Legged Robots Using Online Trajectory Optimization,” in IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3626-3633, April 2020
2020
-
[3]
https://youtu.be/-7xvqQeoA8c
Boston Dynamics: Introducing handle. https://youtu.be/-7xvqQeoA8c
-
[4]
Learning robust autonomous navigation and locomotion for wheeled-legged robots,
J. Lee et al., “Learning robust autonomous navigation and locomotion for wheeled-legged robots,” Sci. Robot., vol. 9, no. eadi9641, 2024
2024
-
[5]
Robot system of DRC-HUBO+ and control strategy of Team KAIST in DARPA Robotics Challenge Finals,
Lim et al., “Robot system of DRC-HUBO+ and control strategy of Team KAIST in DARPA Robotics Challenge Finals,” in The DARPA Robotics Challenge Finals: Humanoid Robots To The Rescue, M. Spenko, S. Buerger, and K. Iagnemma, Eds., Cham, Switzerland: Springer, 2018, vol. 121, pp. 27-67
2018
-
[6]
Compliant Motion Control of Wheel-Legged Humanoid Robot on Rough Terrains,
L. Zhao, Z. Yu, L. Han, et al., “Compliant Motion Control of Wheel-Legged Humanoid Robot on Rough Terrains,” in IEEE/ASME Transactions on Mechatronics, vol. 29, no. 3, pp. 1949-1959, June 2024
1949
-
[7]
Max: A Wheeled-Legged Quadruped Robot for Multimodal Agile Locomotion,
Q. Zhou, S. Yang, X. Jiang, et al., “Max: A Wheeled-Legged Quadruped Robot for Multimodal Agile Locomotion,” in IEEE Transactions on Automation Science and Engineering, vol. 21, no. 4, pp. 7562-7582, Oct. 2024
2024
-
[8]
A survey of wheeled-legged robots,
M. Bjelonic, V. Klemm, J. Lee, and M. Hutter, “A survey of wheeled-legged robots,” in Robotics in Natural Settings: CLAWAR 2022, J. M. Cascalho, M. O. Tokhi, M. F. Silva, A. Mendes, K. Goher, and M. Funk, Eds., Cham, Switzerland: Springer, 2023, vol. 530, pp. 127-141
2022
-
[9]
Roller-Skating of Mammalian Quadrupedal Robot With Passive Wheels Inspired by Human,
J. Chen, K. Xu and X. Ding, “Roller-Skating of Mammalian Quadrupedal Robot With Passive Wheels Inspired by Human,” in IEEE/ASME Transactions on Mechatronics, vol. 26, no. 3, pp. 1624-1634, June 2021
2021
-
[10]
Design and Control of a Novel Six-Legged Skating Robot With Skateboards,
L. Yang, Y. Yin, F. Gao, et al., “Design and Control of a Novel Six-Legged Skating Robot With Skateboards,” in IEEE/ASME Transactions on Mechatronics, vol. 29, no. 4, pp. 2590-2601, Aug. 2024
2024
-
[11]
Skating with a Force Controlled Quadrupedal Robot,
M. Bjelonic, C. Dario Bellicoso, M. Efe Tiryaki and M. Hutter, “Skating with a Force Controlled Quadrupedal Robot,” 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018, pp. 7555-7561
2018
-
[12]
Unlocking Versatile Locomotion: A Novel Quadrupedal Robot with 4-DoFs Legs for Roller Skating,
J. Chen, R. Qin, L. Huang, et al., “Unlocking Versatile Locomotion: A Novel Quadrupedal Robot with 4-DoFs Legs for Roller Skating,” 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 8037-8043
2024
-
[13]
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms, “2017. [Online]. Available: https://arxiv.org/abs/1707.06347
Pith/arXiv arXiv 2017
-
[14]
Dynamics of a waveboard simplified,
A. DasGupta, “Dynamics of a waveboard simplified,” Proc. R. Soc. A, vol. 476, no. 20200486, 2020
2020
-
[15]
Introduction to autonomous mobile robots
Siegwart, Roland, Illah Reza Nourbakhsh, and Davide Scaramuzza. Introduction to autonomous mobile robots. MIT press, 2011
2011
-
[16]
Extended Three-Dimensional Walking and Skating Motion Generation for Multiple Noncoplanar Contacts With Anisotropic Friction: Application to Walk and Skateboard and Roller Skate,
N. Takasugi, K. Kojima, S. Nozawa, et al., “Extended Three-Dimensional Walking and Skating Motion Generation for Multiple Noncoplanar Contacts With Anisotropic Friction: Application to Walk and Skateboard and Roller Skate,” in IEEE Robotics and Automation Letters, vol. 4, no. 1, pp. 9-16, Jan. 2019
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.