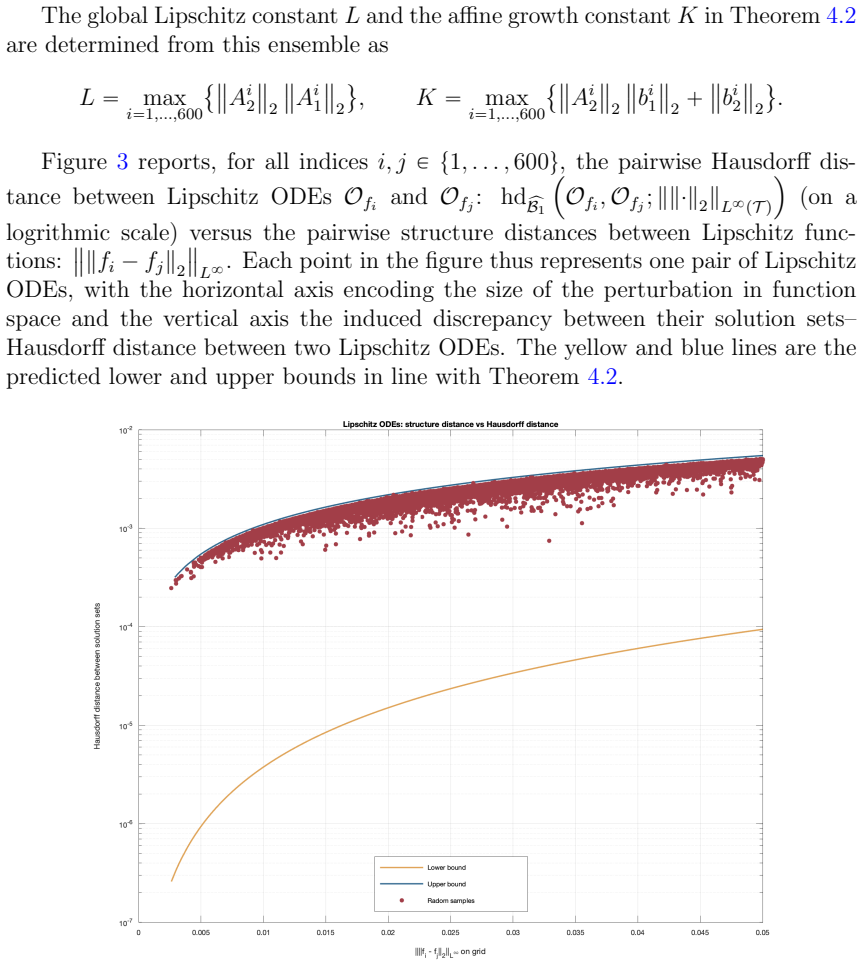
Recovering Governing Equations from Solution Data: Identifiability Bounds for Linear and Nonlinear ODEs
Pith reviewed 2026-06-29 04:38 UTC · model grok-4.3
The pith
The Hausdorff distance on solution sets determines when governing ODEs can be uniquely identified from data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce the Hausdorff distance on solution sets as the natural metric for comparing differential equations, since it captures the worst-case separation between two equations over all admissible initial conditions. We establish identifiability bounds for governing ODEs ranging from linear to nonlinear classes with Lipschitz (Hölder)-continuous vector fields, characterizing when two distinct equations can be distinguished from solution data, and derive metric entropy estimates and sample complexity bounds.
What carries the argument
Hausdorff distance on solution sets, which measures the maximum separation between trajectories of two ODEs over all initial conditions.
If this is right
- Positive Hausdorff distance between solution sets implies the equations are distinguishable given enough solution observations.
- Metric entropy estimates bound the number of distinguishable ODEs in a class, directly controlling the sample size needed for identification.
- Sample complexity bounds quantify the number of observed trajectories required to recover the governing equation with high probability.
- The bounds hold uniformly for linear ODEs and for nonlinear ODEs whose vector fields satisfy Lipschitz or Hölder continuity.
Where Pith is reading between the lines
- The same distance could be used to derive identifiability results for systems with time-varying or control inputs.
- Practical recovery algorithms might use the derived entropy numbers to set stopping criteria or regularization strengths.
- The minimax character of the Hausdorff metric suggests that worst-case initial-condition sampling is necessary for robust identification guarantees.
Load-bearing premise
The Hausdorff distance on solution sets is the natural metric for comparing differential equations because it captures the worst-case separation between two equations over all admissible initial conditions.
What would settle it
Observing two distinct ODEs whose solution sets have small Hausdorff distance yet yield data that allows reliable distinction under some sampling of initial conditions would contradict the metric's claimed suitability for the identification problem.
Figures
read the original abstract
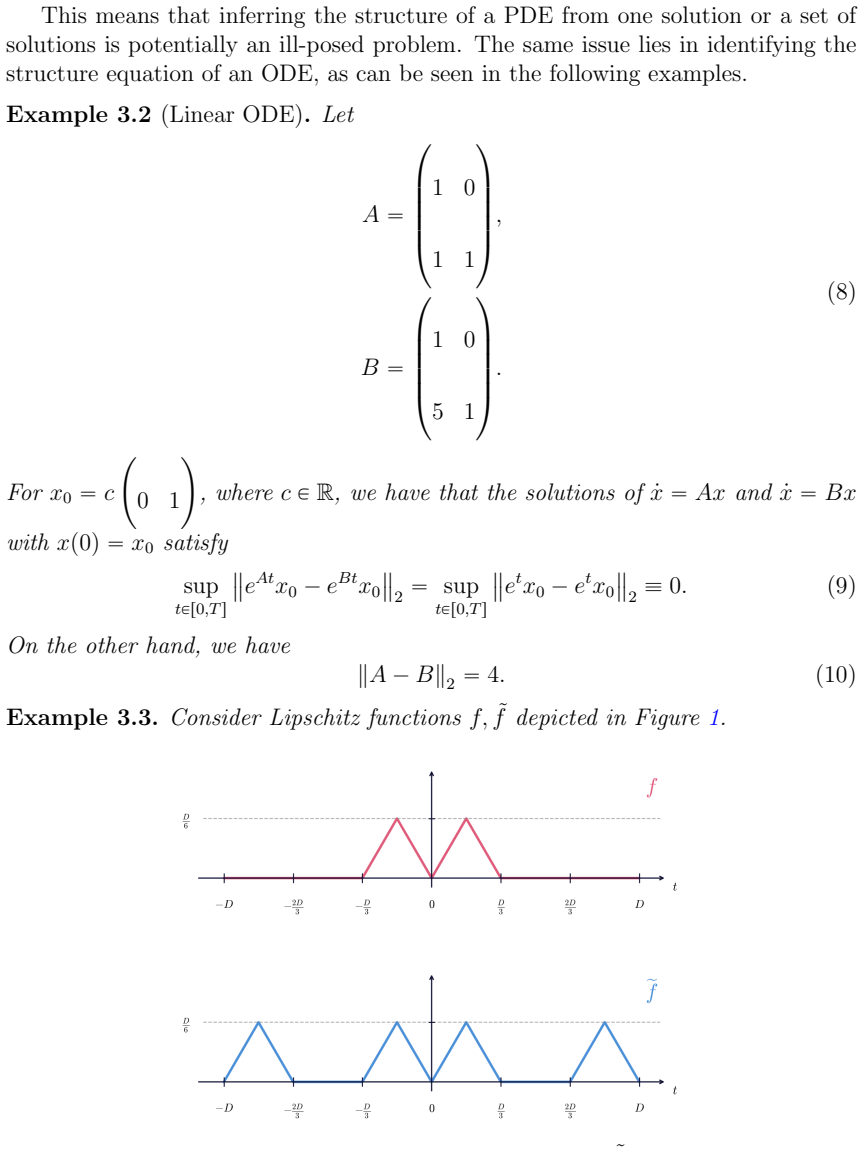
Learning governing equations from observed solution data is a fundamental challenge in scientific machine learning, yet the theoretical conditions under which a ground-truth ODE can be uniquely and stably identified from multiple solution observations remain largely undeveloped, and no quantitative analysis of the sample complexity of such learning tasks exists in the literature. To address this gap, we introduce the Hausdorff distance on solution sets as the natural metric for comparing differential equations, since it captures the worst-case separation between two equations over all admissible initial conditions and thus encodes the minimax structure of the identification problem. We establish identifiability bounds for governing ODEs across a wide class of structure equations--ranging from linear ODEs to nonlinear classes with Lipschitz (H\"older)-continuous vector fields--characterizing precisely when two distinct equations can be distinguished from solution data. Using this metric, we derive metric entropy estimates for the relevant ODE classes and analyze sample complexity bounds, quantifying how many solution observations are needed to reliably recover the governing equation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Hausdorff distance on solution sets as the natural metric for comparing differential equations and uses it to establish identifiability bounds for governing ODEs ranging from linear systems to nonlinear classes with Lipschitz or Hölder-continuous vector fields. It characterizes when two distinct equations can be distinguished from solution data, derives metric entropy estimates for the relevant ODE classes, and analyzes sample complexity bounds quantifying the number of solution observations needed to recover the governing equation.
Significance. If the central constructions hold with the required restrictions, the work would provide the first quantitative identifiability and sample-complexity theory for ODE recovery from solution data, directly addressing a gap in scientific machine learning. The minimax framing via Hausdorff distance on solution sets is a coherent choice for the identification problem.
major comments (2)
- [Section 2 (definition of the metric)] The definition of the Hausdorff distance between solution sets (introduced to encode the minimax identification problem) does not specify a fixed finite time horizon T or a compact domain for admissible initial conditions. Without these, trajectories of distinct Lipschitz or Hölder fields can diverge arbitrarily far, rendering the Hausdorff distance infinite and the subsequent metric entropy and sample-complexity estimates vacuous. This is load-bearing for all claimed bounds.
- [Section 3 (nonlinear Hölder case)] For the Hölder-continuous case with exponent <1, uniqueness of solutions may fail, making the solution set multi-valued; the Hausdorff comparison then requires additional selection rules or Filippov regularization that are not addressed, undermining the identifiability claims for that class.
minor comments (1)
- Notation for the structure equation classes and the precise function spaces (e.g., C^{0,α} vs. Lip) should be stated explicitly at first use to avoid ambiguity in the entropy calculations.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive report. The two major comments identify important technical points that must be made fully explicit. We address each below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Section 2 (definition of the metric)] The definition of the Hausdorff distance between solution sets (introduced to encode the minimax identification problem) does not specify a fixed finite time horizon T or a compact domain for admissible initial conditions. Without these, trajectories of distinct Lipschitz or Hölder fields can diverge arbitrarily far, rendering the Hausdorff distance infinite and the subsequent metric entropy and sample-complexity estimates vacuous. This is load-bearing for all claimed bounds.
Authors: We agree that a fixed finite horizon T and a compact set of admissible initial conditions are required for the Hausdorff distance to be finite and for the subsequent entropy and sample-complexity results to be meaningful. While these restrictions are implicit in the problem formulation (standard for global existence and boundedness arguments in ODE theory), they are not stated explicitly in Section 2. We will add a precise statement of the standing assumptions on T and the initial-condition domain at the beginning of Section 2, together with a short remark confirming that all subsequent bounds are understood to hold under these restrictions. This change will be made in the revised manuscript. revision: yes
-
Referee: [Section 3 (nonlinear Hölder case)] For the Hölder-continuous case with exponent <1, uniqueness of solutions may fail, making the solution set multi-valued; the Hausdorff comparison then requires additional selection rules or Filippov regularization that are not addressed, undermining the identifiability claims for that class.
Authors: The referee correctly notes that for Hölder exponents α < 1 the classical Picard–Lindelöf theorem does not guarantee uniqueness, so the solution set may be multi-valued. The manuscript treats the solution set as the collection of all absolutely continuous curves satisfying the integral equation; the Hausdorff distance is then taken between these (possibly multi-valued) reachable sets. This construction remains well-defined without additional selection rules. Nevertheless, to avoid any ambiguity we will insert a clarifying paragraph in Section 3 that (i) recalls the possible non-uniqueness for α < 1, (ii) states that the Hausdorff metric is applied directly to the full reachable sets, and (iii) notes that the identifiability and entropy bounds continue to hold for the set-valued case. This revision will be included. revision: yes
Circularity Check
No circularity; metric definition followed by independent mathematical derivation
full rationale
The paper defines the Hausdorff distance on solution sets as its comparison metric for ODEs and then derives identifiability bounds, metric entropy estimates, and sample-complexity results from that definition across linear and nonlinear classes. No self-citations appear in the provided text, no parameters are fitted to data and then relabeled as predictions, and no step reduces by construction to its own inputs. The derivation chain is therefore self-contained: the metric is introduced explicitly, and subsequent bounds follow from standard functional-analytic arguments on the chosen function classes.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Hausdorff distance on solution sets is the natural metric for comparing differential equations as it captures the worst-case separation over all admissible initial conditions
Reference graph
Works this paper leans on
-
[1]
Lecture Notes Mathematics of Information
Helmut Bolcskei. “Lecture Notes Mathematics of Information”. In: (2020)
2020
-
[2]
Discovering governing equations from data: Sparse identification of nonlinear dynamical systems
Steven L. Brunton, Joshua L. Proctor, and J. Nathan Kutz. “Discovering Gov- erning Equations from Data: Sparse Identification of Nonlinear Dynamical Sys- tems”. In:Proceedings of the National Academy of Sciences113.15 (Apr. 2016), pp. 3932–3937.issn: 0027-8424, 1091-6490.doi:10.1073/pnas.1517384113. arXiv:1509.03580 [math]
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1073/pnas.1517384113 2016
-
[3]
Finite sample properties of system identi- fication methods
Marco C Campi and Erik Weyer. “Finite sample properties of system identi- fication methods”. In:IEEE Transactions on Automatic Control47.8 (2002), pp. 1329–1334
2002
-
[4]
Physics-informed learning of governing equations from scarce data
Zhao Chen, Yang Liu, and Hao Sun. “Physics-informed learning of governing equations from scarce data”. In:Nature communications12.1 (2021), p. 6136
2021
-
[5]
Identifiability of linear and nonlinear dynamical systems
M Grewal and Keith Glover. “Identifiability of linear and nonlinear dynamical systems”. In:IEEE Transactions on automatic control21.6 (2003), pp. 833– 837
2003
- [6]
-
[7]
Metric entropy limits on recurrent neural network learning of linear dynamical systems
Clemens Hutter, Recep G¨ ul, and Helmut B¨ olcskei. “Metric entropy limits on recurrent neural network learning of linear dynamical systems”. In:Applied and Computational Harmonic Analysis59 (2022), pp. 198–223
2022
-
[8]
Springer, 2006
Victor Isakov.Inverse problems for partial differential equations. Springer, 2006
2006
-
[9]
Entropy per Unit Time as a Metric Invariant of Automor- phism
AN Kolgomorov. “Entropy per Unit Time as a Metric Invariant of Automor- phism”. In:Doklady of Russian Academy of Sciences: Moscow, Russia124 (1959), pp. 754–755
1959
-
[10]
Neural Operator: Learning Maps Between Function Spaces With Applications to PDEs
Nikola Kovachki et al. “Neural Operator: Learning Maps Between Function Spaces With Applications to PDEs”. In:Journal of Machine Learning Re- search24.89 (2023), pp. 1–97.issn: 1533-7928
2023
-
[11]
Neural operator: Learning maps between function spaces with applications to pdes
Nikola Kovachki et al. “Neural operator: Learning maps between function spaces with applications to pdes”. In:Journal of Machine Learning Research 24.89 (2023), pp. 1–97
2023
-
[12]
Fourier Neural Operator for Parametric Partial Differential Equations
Zongyi Li et al. “Fourier neural operator for parametric partial differential equations”. In:arXiv preprint arXiv:2010.08895(2020)
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[13]
System identification
Lennart Ljung. “System identification”. In:Signal analysis and prediction. Springer, 1998, pp. 163–173
1998
-
[14]
On global identifiability for arbitrary model parametrizations
Lennart Ljung and Torkel Glad. “On global identifiability for arbitrary model parametrizations”. In:automatica30.2 (1994), pp. 265–276
1994
-
[15]
PDE-Net: Learning PDEs from Data
Zichao Long et al. “PDE-Net: Learning PDEs from Data”. In:Proceedings of the 35th International Conference on Machine Learning. PMLR, July 2018, pp. 3208–3216. 55
2018
-
[16]
Extrapolation and learning equations
Georg Martius and Christoph H Lampert. “Extrapolation and learning equa- tions”. In:arXiv preprint arXiv:1610.02995(2016)
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[17]
EMS press Berlin, 2023
Richard Nickl.Bayesian non-linear statistical inverse problems. EMS press Berlin, 2023
2023
-
[18]
Non-asymptotic identification of lti sys- tems from a single trajectory
Samet Oymak and Necmiye Ozay. “Non-asymptotic identification of lti sys- tems from a single trajectory”. In:2019 American control conference (ACC). IEEE. 2019, pp. 5655–5661
2019
-
[19]
Baburao G Pachpatte.Integral and finite difference inequalities and applica- tions. Vol. 205. Elsevier, 2006
2006
-
[20]
Metric-Entropy Limits on Nonlinear Dynamical System Learning
Yang Pan, Clemens Hutter, and Helmut B¨ olcskei. “Metric-Entropy Limits on Nonlinear Dynamical System Learning”. In:arXiv preprint arXiv:2407.01250 (2024)
-
[21]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations
Maziar Raissi, Paris Perdikaris, and George E Karniadakis. “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations”. In:Journal of Computational physics378 (2019), pp. 686–707
2019
-
[22]
Convolutional Neural Operators for Robust and Ac- curate Learning of PDEs
Bogdan Raonic et al. “Convolutional Neural Operators for Robust and Ac- curate Learning of PDEs”. In:Advances in Neural Information Processing Systems36 (Dec. 2023), pp. 77187–77200
2023
-
[23]
Convolutional neural operators for robust and accurate learning of PDEs
Bogdan Raonic et al. “Convolutional neural operators for robust and accurate learning of PDEs”. In:Advances in Neural Information Processing Systems36 (2024)
2024
-
[24]
ESPRIT-estimation of signal parameters via rotational invariance techniques
Richard Roy and Thomas Kailath. “ESPRIT-estimation of signal parameters via rotational invariance techniques”. In:IEEE Transactions on acoustics, speech, and signal processing37.7 (2002), pp. 984–995
2002
-
[25]
2021 The source of the major solar energetic particle events from super active region 11944
Samuel H. Rudy et al. “Data-Driven Discovery of Partial Differential Equa- tions”. In:Science Advances3.4 (Apr. 2017), e1602614.doi:10.1126/sciadv. 1602614
-
[26]
Learning equa- tions for extrapolation and control
Subham Sahoo, Christoph Lampert, and Georg Martius. “Learning equa- tions for extrapolation and control”. In:International Conference on Machine Learning. Pmlr. 2018, pp. 4442–4450
2018
-
[27]
Philipp Scholl et al. “The Uniqueness Problem of Physical Law Learning”. In: ICASSP 2023 - 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Rhodes Island, Greece: IEEE, June 2023, pp. 1– 5.isbn: 978-1-72816-327-7.doi:10.1109/ICASSP49357.2023.10095017
- [28]
-
[29]
On the notion of entropy of a dynamical system
Yakov G Sinai. “On the notion of entropy of a dynamical system”. In:Doklady of Russian Academy of Sciences. Vol. 124. 3. 1959, pp. 768–771
1959
-
[30]
Inverse problems: a Bayesian perspective
Andrew M Stuart. “Inverse problems: a Bayesian perspective”. In:Acta nu- merica19 (2010), pp. 451–559. 56 [31]System identification - Wikipedia — en.wikipedia.org. Aug. 2025.url:https: //en.wikipedia.org/wiki/System_identification
2010
-
[31]
V. M. Tikhomirov. “ε-Entropy andε-Capacity of Sets In Functional Spaces”. In:Selected Works of A. N. Kolmogorov: Volume III: Information Theory and the Theory of Algorithms. Ed. by A. N. Shiryayev. Dordrecht: Springer Netherlands, 1993, pp. 86–170.isbn: 978-94-017-2973-4.doi:10.1007/978- 94-017-2973-4_7
-
[32]
AI Feynman: A physics-inspired method for symbolic regression
Silviu-Marian Udrescu and Max Tegmark. “AI Feynman: A physics-inspired method for symbolic regression”. In:Science advances6.16 (2020), eaay2631
2020
-
[33]
Martin J Wainwright.High-dimensional statistics: A non-asymptotic view- point. Vol. 48. Cambridge university press, 2019
2019
-
[34]
Wolfgang Walter.Ordinary Differential Equations. Vol. 182. Graduate Texts in Mathematics. New York, NY: Springer, 1998.doi:10.1007/978-1-4612- 0601-9
-
[35]
On the metric complexity of causal linear systems: Estimates ofε- entropy andε-dimension
G Zames. “On the metric complexity of causal linear systems: Estimates ofε- entropy andε-dimension”. In:1977 IEEE Conference on Decision and Control including the 16th Symposium on Adaptive Processes and A Special Symposium on Fuzzy Set Theory and Applications. IEEE. 1977, pp. 807–810
1977
-
[36]
Ying Zhu and Mozhgan Mirzaei. “Classes of ODE solutions: smoothness, cov- ering numbers, implications for noisy function fitting, and the curse of smooth- ness phenomenon”. In:arXiv preprint arXiv:2011.11371(2020). 57
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.