Stereo-based terrain traversability analysis using normal-based segmentation and superpixel surface analysis
Pith reviewed 2026-05-24 21:21 UTC · model grok-4.3
The pith
A stereo-based method segments terrain into superpixels and classifies their traversability using surface normals and plane estimates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
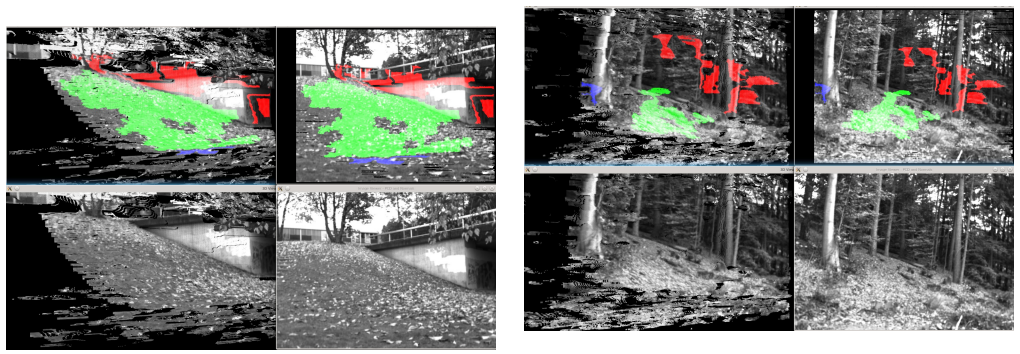
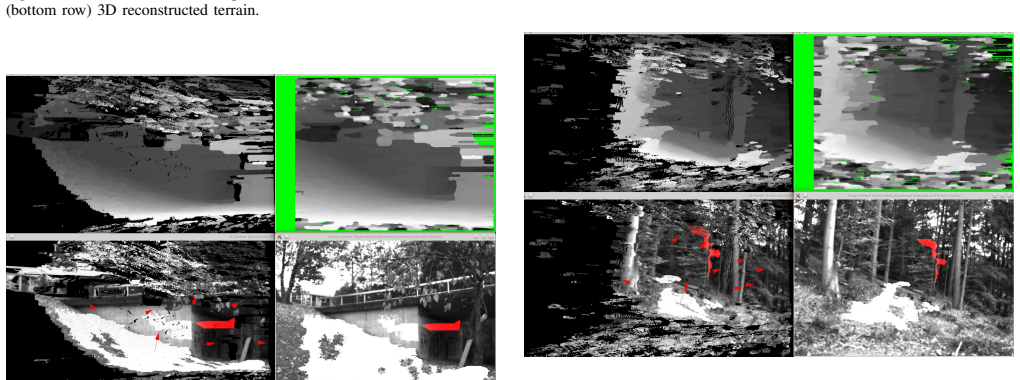
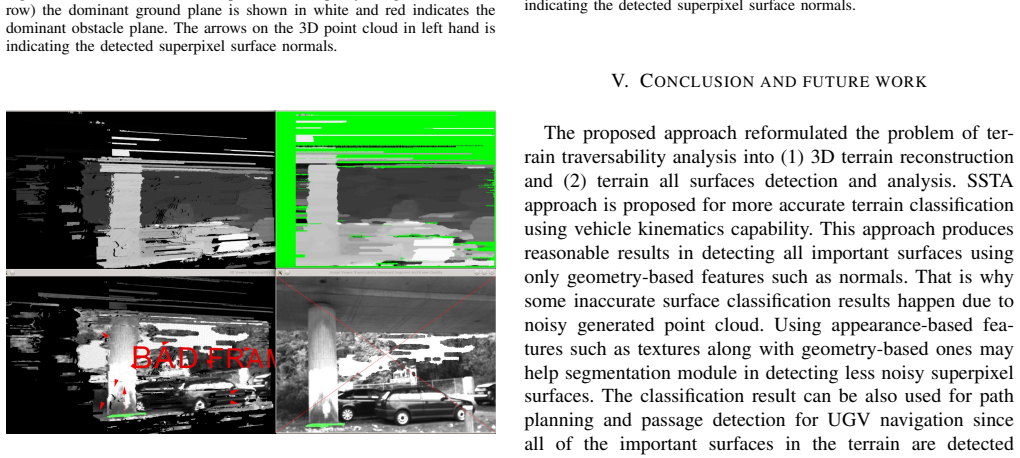
The proposed SSTA approach classifies all detected superpixel surfaces into five main categories: traversable, semi-traversable, non-traversable, unknown and undecided based on superpixel surface normal and plane estimation.
What carries the argument
Superpixel Surface Traversability Analysis (SSTA) that estimates a normal and plane for each superpixel segment obtained from normal-based segmentation of stereo-reconstructed terrain.
If this is right
- Every surface in the reconstructed scene receives an individual traversability label instead of treating the terrain as one uniform region.
- Plane estimation from each superpixel supplies the geometric cue that decides whether a surface belongs to traversable, semi-traversable, or non-traversable classes.
- The five-category output explicitly marks uncertainty through the unknown and undecided labels.
- Segmentation and analysis depend only on geometry-derived normals rather than color or texture cues.
- The resulting labeled map can directly inform path-planning modules for UGVs operating in unstructured environments.
Where Pith is reading between the lines
- If the five-category labels prove stable, planners could assign different risk thresholds to semi-traversable versus non-traversable surfaces.
- The same normal-based superpixel pipeline might be reused for other 3D scene tasks such as obstacle height estimation.
- Running the method on sequential stereo frames would require temporal consistency checks to avoid flickering labels as the vehicle advances.
- Direct comparison against lidar-derived surface labels on the same scenes would quantify how much stereo noise affects the final categories.
Load-bearing premise
Pixel-based surface normals from stereo reconstruction can reliably segment all existing surfaces in the 3D terrain without significant errors from reconstruction noise or textureless areas.
What would settle it
A dataset test in which normal-based segmentation on stereo data produces visibly wrong surface boundaries or plane fits in low-texture regions, resulting in misclassified traversability labels for a measurable fraction of the terrain.
Figures


read the original abstract
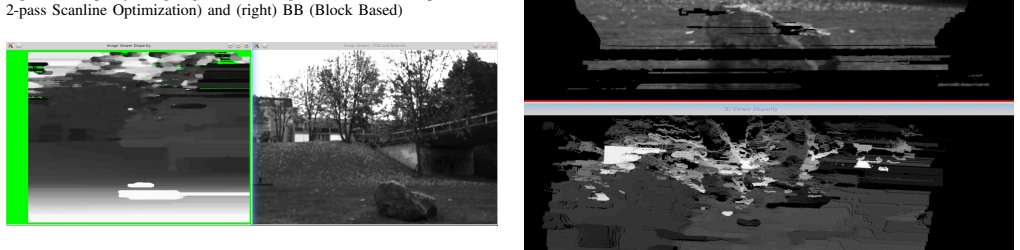
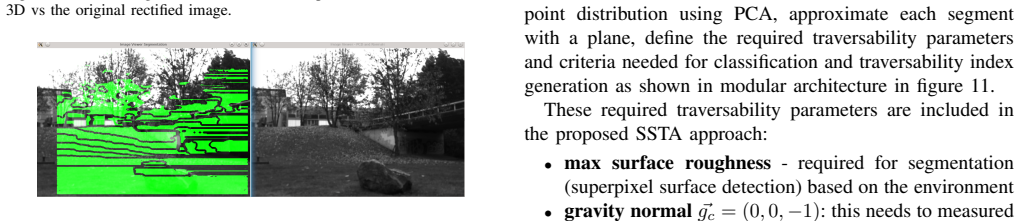
In this paper, an stereo-based traversability analysis approach for all terrains in off-road mobile robotics, e.g. Unmanned Ground Vehicles (UGVs) is proposed. This approach reformulates the problem of terrain traversability analysis into two main problems: (1) 3D terrain reconstruction and (2) terrain all surfaces detection and analysis. The proposed approach is using stereo camera for perception and 3D reconstruction of the terrain. In order to detect all the existing surfaces in the 3D reconstructed terrain as superpixel surfaces (i.e. segments), an image segmentation technique is applied using geometry-based features (pixel-based surface normals). Having detected all the surfaces, Superpixel Surface Traversability Analysis approach (SSTA) is applied on all of the detected surfaces (superpixel segments) in order to classify them based on their traversability index. The proposed SSTA approach is based on: (1) Superpixel surface normal and plane estimation, (2) Traversability analysis using superpixel surface planes. Having analyzed all the superpixel surfaces based on their traversability, these surfaces are finally classified into five main categories as following: traversable, semi-traversable, non-traversable, unknown and undecided.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a stereo-based traversability analysis method for off-road UGVs that reformulates the problem as (1) 3D terrain reconstruction from stereo cameras and (2) detection of all surfaces via normal-based image segmentation into superpixels, followed by Superpixel Surface Traversability Analysis (SSTA) that estimates per-superpixel normals and planes to classify each surface into one of five categories: traversable, semi-traversable, non-traversable, unknown, or undecided.
Significance. If the procedural pipeline were shown to be robust, the geometry-driven superpixel approach could offer a useful alternative to ground-plane-only methods for mobile robot navigation. The explicit handling of multiple surfaces via normals is a reasonable design choice, but the manuscript contains no experiments, baselines, or error metrics, so no assessment of practical significance is possible.
major comments (2)
- [Abstract] Abstract / method description: the central claim that pixel-based surface normals computed from stereo reconstruction suffice to segment all terrain surfaces as superpixels (and thereby enable the five-category SSTA classification) is load-bearing, yet the manuscript provides no validation of normal accuracy, segmentation completeness, or performance in low-texture regions where stereo disparity is known to degrade.
- [Abstract] Abstract: no quantitative results, ablation studies, or comparison to existing traversability methods are reported, leaving the classification claims unsupported.
minor comments (1)
- The five-category classification criteria (e.g., angle or roughness thresholds on the estimated planes) are described only at a high level; explicit formulas or pseudocode would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below, clarifying the scope of the manuscript as a method proposal.
read point-by-point responses
-
Referee: [Abstract] Abstract / method description: the central claim that pixel-based surface normals computed from stereo reconstruction suffice to segment all terrain surfaces as superpixels (and thereby enable the five-category SSTA classification) is load-bearing, yet the manuscript provides no validation of normal accuracy, segmentation completeness, or performance in low-texture regions where stereo disparity is known to degrade.
Authors: The method applies established stereo reconstruction to obtain disparity maps and derives pixel normals from the resulting 3D points for geometry-based superpixel segmentation. No dedicated experiments validating normal accuracy, segmentation completeness, or low-texture performance appear in the manuscript because the contribution centers on the overall pipeline and SSTA logic rather than stereo-specific benchmarking. We agree this constitutes a limitation of the current presentation and will revise to add an explicit discussion of these assumptions and known stereo challenges. revision: partial
-
Referee: [Abstract] Abstract: no quantitative results, ablation studies, or comparison to existing traversability methods are reported, leaving the classification claims unsupported.
Authors: The manuscript introduces a reformulation of traversability analysis into 3D reconstruction followed by normal-based superpixel surface detection and the five-category SSTA classification. No quantitative results, ablations, or baselines are included because the work emphasizes the algorithmic framework over empirical evaluation. We acknowledge that this leaves performance claims without direct numerical support; the paper does not claim such validation and we therefore make no revision to add experiments. revision: no
Circularity Check
No circularity: procedural pipeline with no fitted predictions or self-referential derivations
full rationale
The paper describes an algorithmic pipeline (stereo reconstruction followed by normal-based superpixel segmentation and plane-based classification into five traversability categories) without any mathematical derivation, parameter fitting, or predictions that reduce to the inputs by construction. No equations, self-citations, or ansatzes are invoked in a load-bearing way that would trigger the enumerated circularity patterns. The central claims are self-contained as a proposed method rather than a derived result.
Axiom & Free-Parameter Ledger
axioms (2)
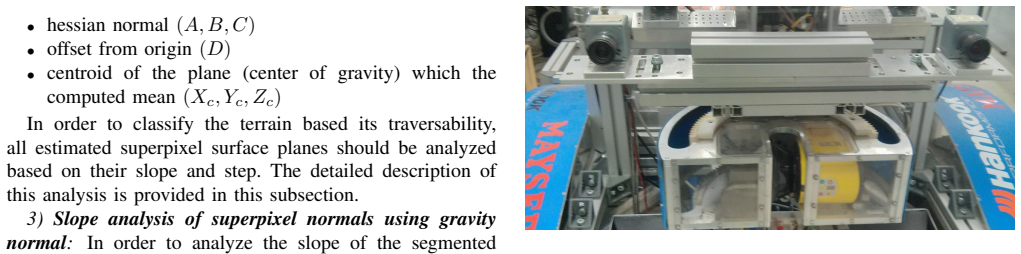
- domain assumption Stereo camera can provide accurate 3D reconstruction of terrain
- domain assumption Surface normals from pixels can be used for reliable segmentation of all surfaces
Reference graph
Works this paper leans on
-
[1]
FP7-ICARUS, http://www.fp7-icarus.eu, 2012, fP7 Euro- pean Commission, Integrated Components for Assisted Rescue and Unmanned Search
work page 2012
-
[2]
Stereo-based terrain traversability esti- mation using surface normals,
A. Dargazany and K. Berns, “Stereo-based terrain traversability esti- mation using surface normals,” inISR/Robotik 2014; 41st International Symposium on Robotics; Proceedings of . VDE, 2014, pp. 1–7
work page 2014
-
[3]
Honda research code sprint: Road segmentation,
A. Trevor, F. Tombari, and R. Rusu, “Honda research code sprint: Road segmentation,” Point Clouds Library,” Technical Report, 2012
work page 2012
-
[4]
Efficient or- ganized point cloud segmentation with connected components,
A. Trevor, S. Gedikli, R. Rusu, and H. Christensen, “Efficient or- ganized point cloud segmentation with connected components,” in Semantic Perception Mapping and Exploration (SPME) , 2013
work page 2013
-
[5]
Efficient traversability analysis for mobile robots using the kinect sensor,
I. Bogoslavskyi, O. Vysotska, J. Serafin, G. Grisetti, and C. Stachniss, “Efficient traversability analysis for mobile robots using the kinect sensor,” in Mobile Robots (ECMR), 2013 European Conference on . IEEE, 2013, pp. 158–163
work page 2013
-
[6]
Uneven- ness point descriptor for terrain analysis in mobile robot applications,
M. Bellone, G. Reina, N. I. Giannoccaro, and L. Spedicato, “Uneven- ness point descriptor for terrain analysis in mobile robot applications,” Int. J. Adv. Robot. Syst , vol. 10, p. 284, 2013
work page 2013
-
[7]
3d traversability awareness for rough terrain mobile robots,
M. Bellone et al, “3d traversability awareness for rough terrain mobile robots,” Sensor Review, vol. 34, no. 2, pp. 220–232, 2014
work page 2014
- [8]
-
[9]
Stereo for robots: quantitative evaluation of efficient and low-memory dense stereo algorithms,
F. Tombari, S. Mattoccia, and L. Di Stefano, “Stereo for robots: quantitative evaluation of efficient and low-memory dense stereo algorithms,” in Control Automation Robotics & Vision (ICARCV), 2010 11th International Conference on . IEEE, 2010, pp. 1231–1238
work page 2010
-
[10]
A taxonomy and evaluation of dense two-frame stereo correspondence algorithms,
D. Scharstein and R. Szeliski, “A taxonomy and evaluation of dense two-frame stereo correspondence algorithms,” International journal of computer vision, vol. 47, no. 1-3, pp. 7–42, 2002
work page 2002
-
[11]
High-quality real-time stereo using adaptive cost aggregation and dynamic program- ming,
L. Wang, M. Liao, M. Gong, R. Yang, and D. Nister, “High-quality real-time stereo using adaptive cost aggregation and dynamic program- ming,” in 3D Data Processing, Visualization, and Transmission, Third International Symposium on . IEEE, 2006, pp. 798–805
work page 2006
- [12]
-
[13]
RA VON – the robust autonomous vehicle for off-road navigation,
C. Armbrust, T. Braun, T. F ¨ohst, M. Proetzsch, A. Renner, B.-H. Sch¨afer, and K. Berns, “RA VON – the robust autonomous vehicle for off-road navigation,” in Using robots in hazardous environments: Landmine detection, de-mining and other applications, Y . Baudoin and M. K. Habib, Eds. Woodhead Publishing Limited, 2010, ch. RA VON – The Robust Autonomous ...
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.