Towards Generalizing Sensorimotor Control Across Weather Conditions
Pith reviewed 2026-05-24 16:08 UTC · model grok-4.3
The pith
Steering angle labels from one weather condition suffice to train control models for multiple other weather conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
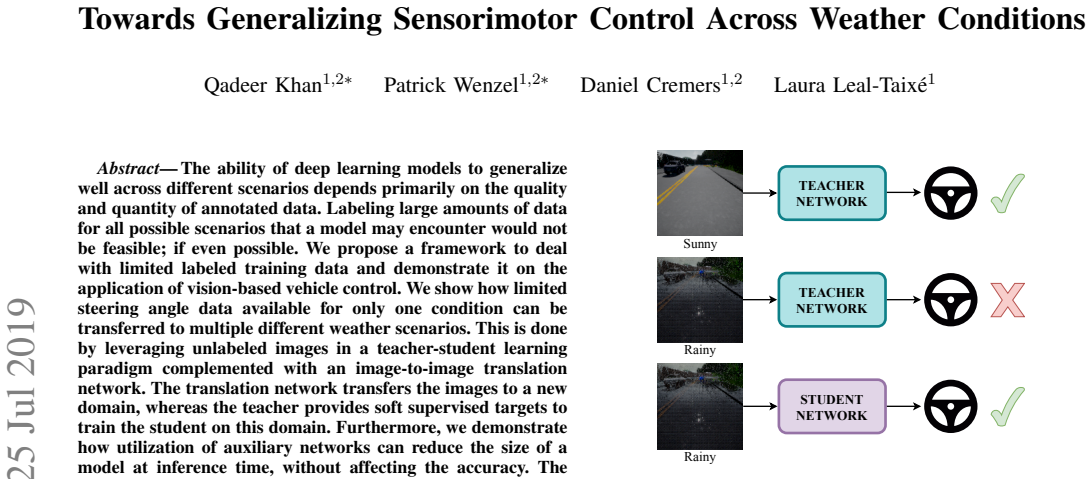
Limited steering angle data from a single domain can be transferred to multiple weather scenarios by leveraging unlabeled images through a teacher-student learning paradigm combined with an image-to-image translation network that maps images between domains while the teacher provides soft supervised targets.
What carries the argument
The teacher-student framework with image-to-image translation, where the translation adapts the input domain and the teacher generates soft labels for training the student controller.
If this is right
- The deployed model can be made smaller at inference time using auxiliary networks while maintaining accuracy.
- Generalization across weather is possible without ground truth labels in the target domains.
- Multiple weather conditions can be handled from labels in just one source domain.
Where Pith is reading between the lines
- This method might apply to other sensorimotor tasks such as speed control or obstacle avoidance.
- Similar translation-based adaptation could address other visual domain shifts like different times of day or camera types.
- Real-world testing on physical vehicles would reveal if the simulated generalization holds in practice.
Load-bearing premise
The image-to-image translation network preserves the visual cues needed to determine the correct steering angle.
What would settle it
If the student model, trained only on translated images and teacher soft targets, shows high steering error when tested on real images from the target weather conditions, the generalization does not work.
Figures





read the original abstract
The ability of deep learning models to generalize well across different scenarios depends primarily on the quality and quantity of annotated data. Labeling large amounts of data for all possible scenarios that a model may encounter would not be feasible; if even possible. We propose a framework to deal with limited labeled training data and demonstrate it on the application of vision-based vehicle control. We show how limited steering angle data available for only one condition can be transferred to multiple different weather scenarios. This is done by leveraging unlabeled images in a teacher-student learning paradigm complemented with an image-to-image translation network. The translation network transfers the images to a new domain, whereas the teacher provides soft supervised targets to train the student on this domain. Furthermore, we demonstrate how utilization of auxiliary networks can reduce the size of a model at inference time, without affecting the accuracy. The experiments show that our approach generalizes well across multiple different weather conditions using only ground truth labels from one domain.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a teacher-student framework augmented with an unpaired image-to-image translation network to transfer steering-angle supervision from a single labeled source weather domain to multiple unlabeled target weather domains. The teacher (trained on source ground truth) supplies soft targets to a student trained on translated target images; auxiliary networks are also used to compress the final inference model without accuracy loss. The central empirical claim is that this yields a policy that generalizes across weather conditions using labels from only one domain.
Significance. If the key invariance assumption holds and the reported experiments are sound, the work would demonstrate a practical route to domain adaptation for end-to-end sensorimotor control, reducing the labeling burden for autonomous-driving perception stacks. The combination of translation and distillation is not novel in itself, but its application to continuous control with explicit attention to model size at inference is relevant to deployment constraints.
major comments (2)
- [Abstract] Abstract: the statement that 'the experiments show that our approach generalizes well across multiple different weather conditions using only ground truth labels from one domain' is presented without any quantitative metrics, error bars, ablation tables, or description of how translation fidelity was verified. Because the central claim is empirical, this absence prevents assessment of whether the result is supported.
- [Method] Method description (teacher-student + translation pipeline): the framework requires that the translation network preserves control-relevant geometry (lane curvature, vanishing point, edge alignment) so that the source-trained teacher produces valid soft targets on translated images. No quantitative check of this invariance (e.g., teacher prediction consistency before/after round-trip translation, or feature-map alignment on control-critical regions) is reported; this assumption is load-bearing for the validity of the student labels on target domains.
minor comments (2)
- [Method] Notation for the distillation loss and the auxiliary-network compression step should be defined explicitly with equations rather than prose descriptions.
- [Experiments] The paper should state the precise weather conditions, dataset sizes, and train/test splits used in the experiments so that the generalization claim can be reproduced.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of empirical support and methodological validation that we address below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the statement that 'the experiments show that our approach generalizes well across multiple different weather conditions using only ground truth labels from one domain' is presented without any quantitative metrics, error bars, ablation tables, or description of how translation fidelity was verified. Because the central claim is empirical, this absence prevents assessment of whether the result is supported.
Authors: We agree that the abstract would benefit from quantitative support for the central empirical claim. The full manuscript contains detailed results with metrics (e.g., steering prediction errors), error bars, and ablations in the Experiments section, but these are not summarized in the abstract. In the revision we will update the abstract to include key quantitative metrics such as mean absolute steering errors on target domains and baseline comparisons. revision: yes
-
Referee: [Method] Method description (teacher-student + translation pipeline): the framework requires that the translation network preserves control-relevant geometry (lane curvature, vanishing point, edge alignment) so that the source-trained teacher produces valid soft targets on translated images. No quantitative check of this invariance (e.g., teacher prediction consistency before/after round-trip translation, or feature-map alignment on control-critical regions) is reported; this assumption is load-bearing for the validity of the student labels on target domains.
Authors: The referee correctly notes that preservation of control-relevant geometry is essential for the validity of the soft targets. The manuscript relies on end-to-end performance on target domains as indirect validation, but does not include direct quantitative checks such as round-trip consistency or feature alignment. We will add such an analysis (teacher prediction consistency on round-trip translations) to the revised manuscript to directly address this point. revision: yes
Circularity Check
No significant circularity; empirical framework is self-contained
full rationale
The paper presents an empirical domain-adaptation pipeline that combines an external image-to-image translation network with teacher-student distillation to transfer steering-angle labels across weather domains. No mathematical derivation, fitted parameter, or uniqueness claim is shown to reduce to its own inputs by construction; all load-bearing steps rely on externally trained models and experimental validation rather than internal self-definition or self-citation chains.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
End to End Learning for Self-Driving Cars
M. Bojarski, D. Del Testa, D. Dworakowski, B. Firner, B. Flepp, P. Goyal, L. D. Jackel, M. Monfort, U. Muller, J. Zhang, X. Zhang, J. Zhao, and K. Zieba, “End to End Learning for Self-Driving Cars,” arXiv preprint arXiv:1604.07316 , 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[2]
Deep Drone Racing: Learning Agile Flight in Dynamic Environments,
E. Kaufmann, A. Loquercio, R. Ranftl, A. Dosovitskiy, V . Koltun, and D. Scaramuzza, “Deep Drone Racing: Learning Agile Flight in Dynamic Environments,” in Conference on Robot Learning (CoRL) , 2018
work page 2018
-
[3]
End-to-End Training of Deep Visuomotor Policies,
S. Levine, C. Finn, T. Darrell, and P. Abbeel, “End-to-End Training of Deep Visuomotor Policies,” Journal of Machine Learning Research , vol. 17, no. 39, pp. 1–40, 2016
work page 2016
-
[4]
Combining Self-Supervised Learning and Imitation for Vision-Based Rope Manipulation,
A. Nair, D. Chen, P. Agrawal, P. Isola, P. Abbeel, J. Malik, and S. Levine, “Combining Self-Supervised Learning and Imitation for Vision-Based Rope Manipulation,” in International Conference on Robotics and Automation (ICRA) , 2017
work page 2017
-
[5]
Deep Imitation Learning for Complex Manipulation Tasks from Vir- tual Reality Teleoperation,
T. Zhang, Z. McCarthy, O. Jow, D. Lee, K. Goldberg, and P. Abbeel, “Deep Imitation Learning for Complex Manipulation Tasks from Vir- tual Reality Teleoperation,” in International Conference on Robotics and Automation (ICRA) , 2018
work page 2018
-
[6]
NID- SLAM: Robust Monocular SLAM using Normalised Information Distance,
G. Pascoe, W. Maddern, M. Tanner, P. Pini ´es, and P. Newman, “NID- SLAM: Robust Monocular SLAM using Normalised Information Distance,” in Conference on Computer Vision and Pattern Recognition (CVPR), 2017
work page 2017
-
[7]
Driving Policy Transfer via Modularity and Abstraction,
M. M ¨uller, A. Dosovitskiy, B. Ghanem, and V . Koltun, “Driving Policy Transfer via Modularity and Abstraction,” in Conference on Robot Learning (CoRL) , 2018
work page 2018
-
[8]
Virtual to Real Reinforcement Learning for Autonomous Driving,
Y . You, X. Pan, Z. Wang, and C. Lu, “Virtual to Real Reinforcement Learning for Autonomous Driving,” in British Machine Vision Con- ference (BMVC), 2017
work page 2017
-
[9]
P. Wenzel, Q. Khan, D. Cremers, and L. Leal-Taix ´e, “Modular Vehi- cle Control for Transferring Semantic Information Between Weather Conditions Using GANs,” in Conference on Robot Learning (CoRL) , 2018
work page 2018
-
[10]
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art,
J. Janai, F. G ¨uney, A. Behl, and A. Geiger, “Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art,”arXiv preprint arXiv:1704.05519, 2017
-
[11]
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite,
A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2012
work page 2012
-
[12]
The Cityscapes Dataset for Semantic Urban Scene Understanding,
M. Cordts, M. Omran, S. Ramos, T. Rehfeld, M. Enzweiler, R. Benen- son, U. Franke, S. Roth, and B. Schiele, “The Cityscapes Dataset for Semantic Urban Scene Understanding,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2016
work page 2016
-
[13]
End-to-end Learning of Driving Models from Large-scale Video Datasets,
H. Xu, Y . Gao, F. Yu, and T. Darrell, “End-to-end Learning of Driving Models from Large-scale Video Datasets,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2017
work page 2017
-
[14]
G. Ros, L. Sellart, J. Materzynska, D. Vazquez, and A. M. Lopez, “The SYNTHIA Dataset: A Large Collection of Synthetic Images for Semantic Segmentation of Urban Scenes,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2016
work page 2016
-
[15]
Virtual Worlds as Proxy for Multi-Object Tracking Analysis,
A. Gaidon, Q. Wang, Y . Cabon, and E. Vig, “Virtual Worlds as Proxy for Multi-Object Tracking Analysis,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2016
work page 2016
-
[16]
S. R. Richter, Z. Hayder, and V . Koltun, “Playing for Benchmarks,” in International Conference on Computer Vision (ICCV) , 2017
work page 2017
-
[17]
Playing for Data: Ground Truth from Computer Games,
S. R. Richter, V . Vineet, S. Roth, and V . Koltun, “Playing for Data: Ground Truth from Computer Games,” in European Conference on Computer Vision (ECCV) , 2016
work page 2016
-
[18]
Stanley : The Robot that Won the DARPA Grand Challenge,
S. Thrun, M. Montemerlo, H. Dahlkamp, D. Stavens, A. Aron, J. Diebel, P. Fong, J. Gale, M. Halpenny, G. Hoffmann, K. Lau, C. Oakley, M. Palatucci, V . Pratt, P. Stang, S. Strohband, C. Dupont, L.-E. Jendrossek, C. Koelen, C. Markey, C. Rummel, J. V . Niek- erk, E. Jensen, P. Alessandrini, G. Bradski, B. Davies, S. Ettinger, A. Kaehler, A. Nefian, and P. Ma...
work page 2006
-
[19]
ALVINN: An Autonomous Land Vehicle in a Neural Network,
D. A. Pomerleau, “ALVINN: An Autonomous Land Vehicle in a Neural Network,” in Neural Information Processing Systems (NIPS) , 1989
work page 1989
-
[20]
End-to-end Driving via Conditional Imitation Learning,
F. Codevilla, M. M ¨uller, A. Dosovitskiy, A. L ´opez, and V . Koltun, “End-to-end Driving via Conditional Imitation Learning,” in Interna- tional Conference on Robotics and Automation (ICRA) , 2018
work page 2018
-
[21]
DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving,
C. Chen, A. Seff, A. Kornhauser, and J. Xiao, “DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving,” in IEEE International Conference on Computer Vision (ICCV) , 2015
work page 2015
-
[22]
Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications,
M. M ¨uller, V . Casser, J. Lahoud, N. Smith, and B. Ghanem, “Sim4CV: A Photo-Realistic Simulator for Computer Vision Applications,” In- ternational Journal of Computer Vision (IJCV) , 2018
work page 2018
-
[23]
AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles,
S. Shah, D. Dey, C. Lovett, and A. Kapoor, “AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles,” in Field and Service Robotics (FSR) , 2017
work page 2017
-
[24]
CARLA: An Open Urban Driving Simulator,
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun, “CARLA: An Open Urban Driving Simulator,” in Conference on Robot Learning (CoRL) , 2017
work page 2017
-
[25]
On Evaluation of Embodied Navigation Agents
P. Anderson, A. Chang, D. S. Chaplot, A. Dosovitskiy, S. Gupta, V . Koltun, J. Kosecka, J. Malik, R. Mottaghi, M. Savva, and A. R. Za- mir, “On Evaluation of Embodied Navigation Agents,” arXiv preprint arXiv:1807.06757, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[26]
On Offline Evaluation of Vision-based Driving Models,
F. Codevilla, A. M. Lopez, V . Koltun, and A. Dosovitskiy, “On Offline Evaluation of Vision-based Driving Models,” in European Conference on Computer Vision (ECCV) , 2018
work page 2018
-
[27]
Unpaired Image-to- Image Translation using Cycle-Consistent Adversarial Networks,
J.-Y . Zhu, T. Park, P. Isola, and A. A. Efros, “Unpaired Image-to- Image Translation using Cycle-Consistent Adversarial Networks,” in International Conference on Computer Vision (ICCV) , 2017
work page 2017
-
[28]
Unsupervised Image-to-Image Translation Networks,
M.-Y . Liu, T. Breuel, and J. Kautz, “Unsupervised Image-to-Image Translation Networks,” in Neural Information Processing Systems (NIPS), 2017
work page 2017
-
[29]
Multimodal Un- supervised Image-to-Image Translation,
X. Huang, M.-Y . Liu, S. Belongie, and J. Kautz, “Multimodal Un- supervised Image-to-Image Translation,” in European Conference on Computer Vision (ECCV) , 2018
work page 2018
-
[30]
Unsu- pervised Image-to-Image Translation with Stacked Cycle-Consistent Adversarial Networks,
M. Li, H. Huang, L. Ma, W. Liu, T. Zhang, and Y .-G. Jiang, “Unsu- pervised Image-to-Image Translation with Stacked Cycle-Consistent Adversarial Networks,” in European Conference on Computer Vision (ECCV), 2018
work page 2018
-
[31]
Distilling the Knowledge in a Neural Network
G. Hinton, O. Vinyals, and J. Dean, “Distilling the Knowledge in a Neural Network,” arXiv preprint arXiv:1503.02531 , 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[32]
Knowledge Distillation in Generations: More Tolerant Teachers Educate Better Students
C. Yang, L. Xie, S. Qiao, and A. Yuille, “Training Deep Neural Networks in Generations: A More Tolerant Teacher Educates Better Students,” arXiv preprint arXiv:1805.05551 , 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[33]
In Teacher We Trust: Learning Compressed Models for Pedestrian Detection
J. Shen, N. Vesdapunt, V . N. Boddeti, and K. M. Kitani, “In Teacher We Trust : Learning Compressed Models for Pedestrian Detection,” arXiv preprint arXiv:1612.00478 , 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[34]
Going deeper with con- volutions,
C. Szegedy, W. Liu, Y . Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V . Vanhoucke, and A. Rabinovich, “Going deeper with con- volutions,” in Conference on Computer Vision and Pattern Recognition (CVPR), 2015
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.