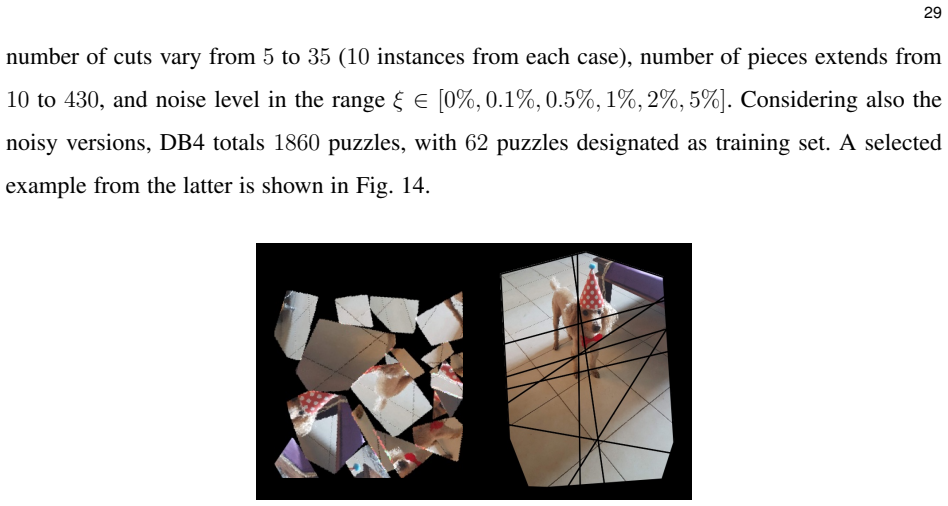
Pictorial and apictorial polygonal jigsaw puzzles from arbitrary number of crossing cuts
Pith reviewed 2026-05-24 13:47 UTC · model grok-4.3
The pith
Polygonal jigsaw puzzles generated by arbitrary crossing cuts can be solved automatically by abstracting them as a spring-mass dynamical system with hierarchical loop constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that abstracting the assembly of these crossing-cut polygonal pieces as a multi-body spring-mass dynamical system endowed with hierarchical loop constraints and a layered reconstruction process renders the puzzles solvable completely automatically, both when the pieces carry no pictorial information and when they do.
What carries the argument
A multi-body spring-mass dynamical system endowed with hierarchical loop constraints and a layered reconstruction process that simulates piece interactions to recover the global assembly.
If this is right
- Puzzles created with an arbitrary number of crossing cuts become tractable despite their combinatorial complexity.
- Both apictorial puzzles and pictorial puzzles on the same polygonal pieces admit automatic solutions.
- Geometrical noise in piece boundaries does not prevent correct reconstruction under the proposed constraints.
- Defined evaluation metrics can quantify the quality of the automatic assemblies produced.
Where Pith is reading between the lines
- The same spring-mass formulation with loop constraints could be tested on fragment-assembly tasks outside jigsaw puzzles, such as reassembling scanned shards of pottery.
- Varying the number of cuts while keeping noise fixed would reveal whether the layered reconstruction scales without additional tuning.
- The hierarchical constraints may implicitly reduce the search space enough to avoid many local minima that plague purely combinatorial matchers.
Load-bearing premise
The spring-mass simulation with loop constraints will converge to the globally correct assembly even when piece geometry is contaminated by realistic noise.
What would settle it
A run of the spring-mass simulation on a set of noisy pieces from a known original polygon that fails to reach the correct global configuration.
Figures


































read the original abstract
Jigsaw puzzle solving, the problem of constructing a coherent whole from a set of non-overlapping unordered visual fragments, is fundamental to numerous applications, and yet most of the literature of the last two decades has focused thus far on less realistic puzzles whose pieces are identical squares. Here, we formalize a new type of jigsaw puzzle where the pieces are general convex polygons generated by cutting through a global polygonal shape with an arbitrary number of straight cuts, a generation model inspired by the celebrated Lazy caterer sequence. We analyze the theoretical properties of such puzzles, including the inherent challenges in solving them once pieces are contaminated with geometrical noise. To cope with such difficulties and obtain tractable solutions, we abstract the problem as a multi-body spring-mass dynamical system endowed with hierarchical loop constraints and a layered reconstruction process. We define evaluation metrics and present experimental results on both apictorial and pictorial puzzles to show that they are solvable completely automatically.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper formalizes a new class of jigsaw puzzles in which convex polygonal pieces are generated by an arbitrary number of straight cuts through a global shape (inspired by the lazy caterer's sequence). It analyzes theoretical properties and noise-induced challenges, then abstracts the assembly task as a multi-body spring-mass dynamical system equipped with hierarchical loop constraints and a layered reconstruction process. Experiments on both apictorial and pictorial instances are presented to demonstrate that the puzzles can be solved completely automatically.
Significance. If the spring-mass formulation with loop constraints reliably recovers the correct global assembly under realistic geometric noise, the work would introduce a practically relevant extension of jigsaw-puzzle research beyond square-piece instances and supply a concrete generation model together with an automatic solver. The explicit treatment of crossing-cut geometry and the definition of evaluation metrics are positive contributions that could support further reproducible studies.
major comments (2)
- [Abstract] Abstract: the central claim that the multi-body spring-mass system with hierarchical loop constraints 'solves noisy instances' and yields 'completely automatic' solutions is load-bearing, yet the abstract supplies neither the explicit energy function, the integration scheme, nor any convergence or basin-of-attraction analysis. Without these elements it is impossible to assess whether the method escapes the local minima that the skeptic correctly flags as a risk when vertex positions are perturbed by cutting noise.
- [Abstract] Abstract (and the description of the layered reconstruction process): the assumption that the dynamical system converges to the unique correct assembly even after realistic geometric noise is stated without quantitative support (e.g., success rate versus noise variance, number of cuts, or piece count). This omission directly undermines the claim that the approach handles the 'inherent challenges' identified in the theoretical analysis.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We address each major comment below, clarifying the manuscript content and indicating revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the multi-body spring-mass system with hierarchical loop constraints 'solves noisy instances' and yields 'completely automatic' solutions is load-bearing, yet the abstract supplies neither the explicit energy function, the integration scheme, nor any convergence or basin-of-attraction analysis. Without these elements it is impossible to assess whether the method escapes the local minima that the skeptic correctly flags as a risk when vertex positions are perturbed by cutting noise.
Authors: The abstract is a high-level summary; the explicit energy function, integration scheme (Euler integration with the described forces), and hierarchical loop constraints are fully specified in Section 3. The layered reconstruction process appears in Section 4. No formal basin-of-attraction analysis is provided, but Section 5 reports consistent convergence to the correct assembly across all tested noisy instances. We will revise the abstract to reference the energy formulation and experimental robustness. revision: partial
-
Referee: [Abstract] Abstract (and the description of the layered reconstruction process): the assumption that the dynamical system converges to the unique correct assembly even after realistic geometric noise is stated without quantitative support (e.g., success rate versus noise variance, number of cuts, or piece count). This omission directly undermines the claim that the approach handles the 'inherent challenges' identified in the theoretical analysis.
Authors: Section 5 supplies the requested quantitative support: success rates are tabulated versus noise variance, number of cuts, and piece count for both apictorial and pictorial cases, showing complete automatic recovery in all reported trials. The abstract summarizes these outcomes. We will revise the abstract to include a concise statement of the empirical success rates. revision: yes
Circularity Check
No significant circularity; modeling choice is independent of claimed results
full rationale
The paper presents an abstraction of the jigsaw problem as a multi-body spring-mass dynamical system with hierarchical loop constraints and layered reconstruction. This is introduced as a modeling decision to obtain tractable solutions, followed by experimental validation on noisy puzzles. No equations, fitted parameters renamed as predictions, or self-citations are shown in the provided text that would reduce the central claim to its own inputs by construction. The derivation chain is self-contained as a forward simulation approach whose success is evaluated externally via defined metrics and experiments, consistent with a non-circular contribution.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Pieces are convex polygons produced by an arbitrary number of straight cuts through a global polygonal shape
invented entities (1)
-
multi-body spring-mass dynamical system with hierarchical loop constraints
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
we abstract the problem as a multi-body spring-mass dynamical system endowed with hierarchical loop constraints and a layered reconstruction process
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
A DLURU , N., Y ANG , X., AND LATECKI , L. J. Sequential monte carlo for maximum weight subgraphs with application to solving image jigsaw puzzles. International journal of computer vision 112 , 3 (2015), 319–341
work page 2015
-
[2]
Solving square jigsaw puzzles using dynamic programming and the hungarian procedure
A LAJLAN , N. Solving square jigsaw puzzles using dynamic programming and the hungarian procedure. American Journal of Applied Sciences 6, 11 (2009), 1941
work page 2009
-
[3]
PSQP: Puzzle solving by quadratic programming
A NDALO , F., T AUBIN , G., AND GOLDENSTEIN , S. PSQP: Puzzle solving by quadratic programming. IEEE PAMI 39, 2 (2016), 385–396
work page 2016
-
[4]
A., C ARNEIRO , G., T AUBIN , G., G OLDENSTEIN , S., AND VELHO , L
A NDALÓ , F. A., C ARNEIRO , G., T AUBIN , G., G OLDENSTEIN , S., AND VELHO , L. Automatic reconstruction of ancient portuguese tile panels. IEEE Comput. Graphics Appl (2016)
work page 2016
-
[5]
Probability models in engineering and science
B ENAROYA , H., AND HAN, S. Probability models in engineering and science
-
[6]
Hot tiles: A heat diffusion based descriptor for automatic tile panel assembly
B RANDÃO , S., AND MARQUES , M. Hot tiles: A heat diffusion based descriptor for automatic tile panel assembly. In European Conference on Computer Vision (2016), Springer, pp. 768–782
work page 2016
-
[7]
J., L AKEN , L., D UTRÉ , P., G OOL , L., R USINKIEWICZ , S., AND WEYRICH , T
B ROWN , B. J., L AKEN , L., D UTRÉ , P., G OOL , L., R USINKIEWICZ , S., AND WEYRICH , T. Tools for virtual reassembly of fresco fragments. International Journal of Heritage in the Digital Era 1 (2012), 313–329
work page 2012
-
[8]
Jigsaw puzzle solving using approximate string matching and best-first search
B UNKE , H., AND KAUFMANN , G. Jigsaw puzzle solving using approximate string matching and best-first search. In International Conference on Computer Analysis of Images and Patterns (1993), Springer, pp. 299–308
work page 1993
-
[9]
B URDEA , B., AND WOLFSON , H. J. Solving jigsaw puzzles by a robot. IEEE Transactions on robotics and automation 5, 6 (1989), 752–764
work page 1989
-
[10]
J., R USINKIEWICZ , S., F UNKHOUSER , T., AND WEYRICH , T
C ASTAÑEDA , A., B ROWN , B. J., R USINKIEWICZ , S., F UNKHOUSER , T., AND WEYRICH , T. Global consistency in the automatic assembly of fragmented artefacts. In VAST (2011). 60
work page 2011
-
[11]
C ATTO, E. Box2d. https://github.com/erincatto/Box2D
-
[12]
S., A VIDAN , S., AND FREEMAN , W
C HO, T. S., A VIDAN , S., AND FREEMAN , W. T. A probabilistic image jigsaw puzzle solver. In 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (2010), IEEE, pp. 183–190
work page 2010
-
[13]
C HUNG , M. G., F LECK , M. M., AND FORSYTH , D. A. Jigsaw puzzle solver using shape and color. In ICSP’98. 1998 Fourth International Conference on Signal Processing (Cat. No. 98TH8344) (1998), vol. 2, IEEE, pp. 877–880
work page 1998
-
[14]
Region filling and object removal by exemplar-based image inpainting
C RIMINISI , A., P ÉREZ , P., AND TOYAMA, K. Region filling and object removal by exemplar-based image inpainting. IEEE Transactions on image processing 13, 9 (2004), 1200–1212
work page 2004
-
[15]
Constructing the topological solution of jigsaw puzzles
D E BOCK , J., D E SMET, R., P HILIPS , W., AND D’H AEYER , J. Constructing the topological solution of jigsaw puzzles. In 2004 International Conference on Image Processing, 2004. ICIP’04. (2004), vol. 3, IEEE, pp. 2127–2130
work page 2004
-
[16]
D EMAINE , E. D., AND DEMAINE , M. L. Jigsaw puzzles, edge matching, and polyomino packing: Connections and complexity. Graphs and Combinatorics 23, 1 (Jun 2007), 195–208
work page 2007
-
[17]
Solving archaeological puzzles
D ERECH , N., T AL, A., AND SHIMSHONI , I. Solving archaeological puzzles. Pattern Recognition (2021), 108065
work page 2021
-
[18]
D ICE , L. R. Measures of the amount of ecologic association between species. Ecology 26, 3 (1945), 297–302
work page 1945
-
[19]
An image processing approach for jigsaw puzzle assembly
F EI, N., Z HUANG , F., R ENQIANG , L., Q IXIN , C., AND YANZHENG , Z. An image processing approach for jigsaw puzzle assembly. Assembly Automation 27, 1 (2007), 25–30
work page 2007
-
[20]
Apictorial jigsaw puzzles: The computer solution of a problem in pattern recognition
F REEMAN , H., AND GARDER , L. Apictorial jigsaw puzzles: The computer solution of a problem in pattern recognition. IEEE Transactions on Electronic Computers, 2 (1964), 118–127
work page 1964
-
[21]
J., D OBKIN , D., R USINKIEWICZ , S., AND WEYRICH , T
F UNKHOUSER , T., S HIN , H., T OLER -FRANKLIN , C., C ASTAÑEDA , A., B ROWN , B. J., D OBKIN , D., R USINKIEWICZ , S., AND WEYRICH , T. Learning how to match fresco fragments. ACM Journal on Computing and Cultural Heritage 4 (2011), 7:1–7:13
work page 2011
-
[22]
G ALLAGHER , A. C. Jigsaw puzzles with pieces of unknown orientation. In 2012 IEEE Conference on Computer Vision and Pattern Recognition (2012), IEEE, pp. 382–389
work page 2012
-
[23]
G ASSNER , N., B AASE , W., AND MATTHEWS , B. A test of the "jigsaw puzzle" model for protein folding by multiple methionine substitutions within the core of t4 lysozyme. Proceedings of the National Academy of Sciences 93 , 22 (1996), 12155–12158
work page 1996
-
[24]
‘The more things change’: HUMINT in the cyber age
G IOE , D. ‘The more things change’: HUMINT in the cyber age. In The Palgrave handbook of security, risk and intelligence. Springer, 2017, pp. 213–227
work page 2017
-
[25]
A global approach to automatic solution of jigsaw puzzles
G OLDBERG , D., M ALON , C., AND BERN , M. A global approach to automatic solution of jigsaw puzzles. In Proceedings of the eighteenth annual symposium on Computational geometry (2002), ACM, pp. 82–87
work page 2002
-
[26]
Reaching the point of no return: the computational revolution in archaeology
G ROSMAN , L. Reaching the point of no return: the computational revolution in archaeology. Annual review of Anthropology 45 (2016), 129–145
work page 2016
-
[27]
From square pieces to brick walls: The next challenge in solving jigsaw puzzles
G UR, S., AND BEN-S HAHAR , O. From square pieces to brick walls: The next challenge in solving jigsaw puzzles. In Proceedings of the IEEE International Conference on Computer Vision (2017), pp. 4029–4037
work page 2017
-
[28]
Reassembling fractured objects by geometric matching
H UANG , Q., F LÖRY, S., G ELFAND , N., H OFER , M., AND POTTMANN , H. Reassembling fractured objects by geometric matching. ACM Trans. Graph. 25 (2006), 569–578
work page 2006
-
[29]
An optimal algorithm for extracting the regions of a plane graph
J IANG , X., AND BUNKE , H. An optimal algorithm for extracting the regions of a plane graph. Pattern Recognition Letters 14, 7 (1993), 553–558
work page 1993
-
[30]
Scientific puzzle solving: Current techniques and applications
K LEBER , F., AND SABLATNIG , R. Scientific puzzle solving: Current techniques and applications. In CAA (2009)
work page 2009
-
[31]
A survey of techniques for document and archaeology artefact reconstruction
K LEBER , F., AND SABLATNIG , R. A survey of techniques for document and archaeology artefact reconstruction. In ICDAR (2009), pp. 1061–1065. 61
work page 2009
-
[32]
Computer-aided reconstruction and new matches in the forma urbis romae
K OLLER , D., AND LEVOY, M. Computer-aided reconstruction and new matches in the forma urbis romae. Bullettino Della Commissione Archeologica Comunale di Roma 2 (2006), 103–125
work page 2006
-
[33]
K ONG , W., AND KIMIA , B. B. On solving 2d and 3d puzzles using curve matching. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001 (2001), vol. 2, IEEE, pp. II–II
work page 2001
-
[34]
K OSIBA , D. A., D EVAUX, P. M., B ALASUBRAMANIAN , S., G ANDHI , T. L., AND KASTURI , K. An automatic jigsaw puzzle solver. In Proceedings of 12th International Conference on Pattern Recognition (1994), vol. 1, IEEE, pp. 616–618
work page 1994
-
[35]
Jigsawnet: Shredded image reassembly using convolutional neural network and loop-based composition
L E, C., AND LI, X. Jigsawnet: Shredded image reassembly using convolutional neural network and loop-based composition. IEEE Transactions on Image Processing (2019)
work page 2019
-
[36]
Pairwise matching for 3d fragment reassembly based on boundary curves and concave- convex patches
L I, Q., G ENG , G., AND ZHOU , M. Pairwise matching for 3d fragment reassembly based on boundary curves and concave- convex patches. IEEE Access 8 (2020), 6153–6161
work page 2020
-
[37]
The geological development of the arctic
L INDSTRÖM , M. The geological development of the arctic. In The Arctic. Routledge, 2019, pp. 3–25
work page 2019
-
[38]
Automated assembly of shredded pieces from multiple photos
L IU, H., C AO, S., AND YAN, S. Automated assembly of shredded pieces from multiple photos. IEEE Transactions on Multimedia 13, 5 (2011), 1154–1162
work page 2011
-
[39]
A new technique for solving a jigsaw puzzle
M AKRIDIS , M., AND PAPAMARKOS , N. A new technique for solving a jigsaw puzzle. In 2006 International Conference on Image Processing (2006), IEEE, pp. 2001–2004
work page 2006
-
[40]
Mitochondrial dna as a genomic jigsaw puzzle
M ARANDE , W., AND BURGER , G. Mitochondrial dna as a genomic jigsaw puzzle. Science 318, 5849 (2007), 415–415
work page 2007
-
[41]
Fractured object reassembly via robust surface registration
M AVRIDIS , P., A NDREADIS , A., AND PAPAIOANNOU , G. Fractured object reassembly via robust surface registration. In Eurographics (2015)
work page 2015
-
[42]
Semi-automatic geometry-driven reassembly of fractured archeological objects
M ELLADO , N., R EUTER , P., AND SCHLICK , C. Semi-automatic geometry-driven reassembly of fractured archeological objects. In VAST (2010)
work page 2010
-
[43]
Robust solvers for square jigsaw puzzles
M ONDAL , D., WANG , Y., AND DUROCHER , S. Robust solvers for square jigsaw puzzles. In 2013 International Conference on Computer and Robot Vision (2013), IEEE, pp. 249–256
work page 2013
-
[44]
M OORE , T. L. Using euler’s formula to solve plane separation problems. The College Mathematics Journal 22 , 2 (1991), 125–130
work page 1991
-
[45]
Assembly of puzzles by connecting between blocks
M URAKAMI , T., T OYAMA, F., S HOJI , K., AND MIYAMICHI , J. Assembly of puzzles by connecting between blocks. In 2008 19th International Conference on Pattern Recognition (2008), IEEE, pp. 1–4
work page 2008
-
[46]
R., D REWSEN , P., AND HANSEN , K
N IELSEN , T. R., D REWSEN , P., AND HANSEN , K. Solving jigsaw puzzles using image features. Pattern Recognition Letters 29, 14 (2008), 1924–1933
work page 2008
-
[47]
Reassembling thin artifacts of unknown geometry
O XHOLM , G., AND NISHINO , K. Reassembling thin artifacts of unknown geometry. In VAST (2011)
work page 2011
-
[48]
Solving multiple square jigsaw puzzles with missing pieces
P AIKIN , G., AND TAL, A. Solving multiple square jigsaw puzzles with missing pieces. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (2015), pp. 4832–4839
work page 2015
-
[49]
A computer-assisted constraint-based system for assembling fragmented objects
P ALMAS , G., P IETRONI , N., C IGNONI , P., AND SCOPIGNO , R. A computer-assisted constraint-based system for assembling fragmented objects. 2013 Digital Heritage International Congress (DigitalHeritage) 1 (2013), 529–536
work page 2013
-
[50]
On the automatic assemblage of arbitrary broken solid artefacts
P APAIOANNOU , G., AND KARABASSI , E.-A. On the automatic assemblage of arbitrary broken solid artefacts. Image Vis. Comput. 21 (2003), 401–412
work page 2003
-
[51]
Virtual archaeologist: Assembling the past
P APAIOANNOU , G., K ARABASSI , E.-A., AND THEOHARIS , T. Virtual archaeologist: Assembling the past. IEEE Computer Graphics and Applications 21 (2001), 53–59
work page 2001
-
[52]
Contour-shape based reconstruction of fragmented, 1600 bc wall paintings
P APAODYSSEUS , C., P ANAGOPOULOS , T., E XARHOS , M., T RIANTAFILLOU , C., F RAGOULIS , D., AND DOUMAS , C. Contour-shape based reconstruction of fragmented, 1600 bc wall paintings. IEEE Trans. Signal Process. 50 (2002), 1277– 1288. 62
work page 2002
-
[53]
Deepzzle: Solving visual jigsaw puzzles with deep learning and shortest path optimization
P AUMARD , M.-M., P ICARD , D., AND TABIA , H. Deepzzle: Solving visual jigsaw puzzles with deep learning and shortest path optimization. IEEE Transactions on Image Processing 29 (2020), 3569–3581
work page 2020
-
[54]
P INTUS , R., P AL, K., Y ANG , Y., W EYRICH , T., G OBBETTI , E., AND RUSHMEIER , H. E. Geometric analysis in cultural heritage. In GCH (2014), pp. 117–133
work page 2014
-
[55]
A fully automated greedy square jigsaw puzzle solver
P OMERANZ , D., S HEMESH , M., AND BEN-S HAHAR , O. A fully automated greedy square jigsaw puzzle solver. In CVPR 2011 (2011), IEEE, pp. 9–16
work page 2011
-
[56]
R ADACK , G. M., AND BADLER , N. I. Jigsaw puzzle matching using a boundary-centered polar encoding. Computer Graphics and Image Processing 19, 1 (1982), 1–17
work page 1982
-
[57]
R IKA , D., S HOLOMON , D., D AVID, E. O., AND NETANYAHU , N. S. A novel hybrid scheme using genetic algorithms and deep learning for the reconstruction of portuguese tile panels. In Proceedings of the Genetic and Evolutionary Computation Conference (2019), ACM, pp. 1319–1327
work page 2019
-
[58]
S A ˘GIRO ˘GLU , M. ¸ S.,AND ERÇIL , A. Optimization for automated assembly of puzzles. Top 18, 2 (2010), 321–338
work page 2010
-
[59]
Analyzing and simulating fracture patterns of theran wall paintings
S HIN , H., D OUMAS , C., F UNKHOUSER , T., R USINKIEWICZ , S., S TEIGLITZ , K., V LACHOPOULOS , A., AND WEYRICH , T. Analyzing and simulating fracture patterns of theran wall paintings. Journal on Computing and Cultural Heritage (JOCCH) 5, 3 (2012), 10
work page 2012
-
[60]
S HOLOMON , D., D AVID, O., AND NETANYAHU , N. S. A genetic algorithm-based solver for very large jigsaw puzzles. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (2013), pp. 1767–1774
work page 2013
-
[61]
S HOLOMON , D., D AVID, O. E., AND NETANYAHU , N. S. A generalized genetic algorithm-based solver for very large jigsaw puzzles of complex types. In Twenty-Eighth AAAI Conference on Artificial Intelligence (2014)
work page 2014
-
[62]
S ON, K., H AYS, J., AND COOPER , D. B. Solving square jigsaw puzzles with loop constraints. In European Conference on Computer Vision (2014), Springer, pp. 32–46
work page 2014
-
[63]
S ON, K., H AYS, J., AND COOPER , D. B. Solving square jigsaw puzzle by hierarchical loop constraints. IEEE transactions on pattern analysis and machine intelligence (2018)
work page 2018
- [64]
-
[65]
Least-squares rigid motion using svd
S ORKINE -H ORNUNG , O., AND RABINOVICH , M. Least-squares rigid motion using svd. Computing 1, 1 (2017)
work page 2017
-
[66]
J., W EYRICH , T., FUNKHOUSER , T., AND RUSINKIEWICZ , S
T OLER -FRANKLIN , C., B ROWN , B. J., W EYRICH , T., FUNKHOUSER , T., AND RUSINKIEWICZ , S. Multi-feature matching of fresco fragments. In SIGGRAPH 2010 (2010)
work page 2010
-
[67]
Assembly of puzzles using a genetic algorithm
T OYAMA, F., F UJIKI , Y., S HOJI , K., AND MIYAMICHI , J. Assembly of puzzles using a genetic algorithm. In Object recognition supported by user interaction for service robots (2002), vol. 4, IEEE, pp. 389–392
work page 2002
-
[68]
Automatic color based reassembly of fragmented images and paintings
T SAMOURA , E., AND PITAS, I. Automatic color based reassembly of fragmented images and paintings. IEEE Transactions on Image Processing 19, 3 (2009), 680–690
work page 2009
-
[69]
The puzzle assembled: Ediacaran guide fossil Cloudina reveals an old proto-Gondwana seaway
W ARREN , L., Q UAGLIO , F., R ICCOMINI , C., S IMÕES , M., P OIRÉ , D., S TRIKIS , N., A NELLI , L., AND STRIKIS , P. The puzzle assembled: Ediacaran guide fossil Cloudina reveals an old proto-Gondwana seaway. Geology 42 , 5 (05 2014), 391–394
work page 2014
-
[70]
W EBSTER , R. W., L AFOLLETTE , P. S., AND STAFFORD , R. L. Isthmus critical points for solving jigsaw puzzles in computer vision. IEEE transactions on systems, man, and cybernetics 21 , 5 (1991), 1271–1278
work page 1991
-
[71]
Computational reconstruction of ancient artifacts
W ILLIS , A., AND COOPER , D. Computational reconstruction of ancient artifacts. IEEE Signal Processing Magazine 25 (2008). 63
work page 2008
-
[72]
Solving jigsaw puzzles by computer
W OLFSON , H., S CHONBERG , E., K ALVIN , A., AND LAMDAN , Y. Solving jigsaw puzzles by computer. Annals of Operations Research 12, 1 (1988), 51–64
work page 1988
-
[73]
Y ANG , X., A DLURU , N., AND LATECKI , L. J. Particle filter with state permutations for solving image jigsaw puzzles. In CVPR 2011 (2011), IEEE, pp. 2873–2880
work page 2011
-
[74]
A shape and image merging technique to solve jigsaw puzzles
Y AO, F.-H., AND SHAO, G.-F. A shape and image merging technique to solve jigsaw puzzles. Pattern Recognition Letters 24, 12 (2003), 1819–1835
work page 2003
-
[75]
Solving Jigsaw Puzzles with Linear Programming
Y U, R., R USSELL , C., AND AGAPITO , L. Solving jigsaw puzzles with linear programming. arXiv preprint arXiv:1511.04472 (2015)
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[76]
A graph-based optimization algorithm for fragmented image reassembly
Z HANG , K., AND LI, X. A graph-based optimization algorithm for fragmented image reassembly. Graphical Models 76, 5 (2014), 484–495
work page 2014
-
[77]
A puzzle solver and its application in speech descrambling
Z HAO, Y.-X., S U, M.-C., C HOU , Z.-L., AND LEE, J. A puzzle solver and its application in speech descrambling. In WSEAS International Conference on Computer Engineering and Applications (2007), pp. 171–176
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.