Multi-FEAT: Multi-Feature Edge Alignment for Targetless Camera-LiDAR Calibration
Pith reviewed 2026-05-24 11:41 UTC · model grok-4.3
The pith
Multi-FEAT achieves reliable targetless camera-LiDAR calibration by aligning multi-feature edges extracted from cylindrical LiDAR panoramas with camera edges.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
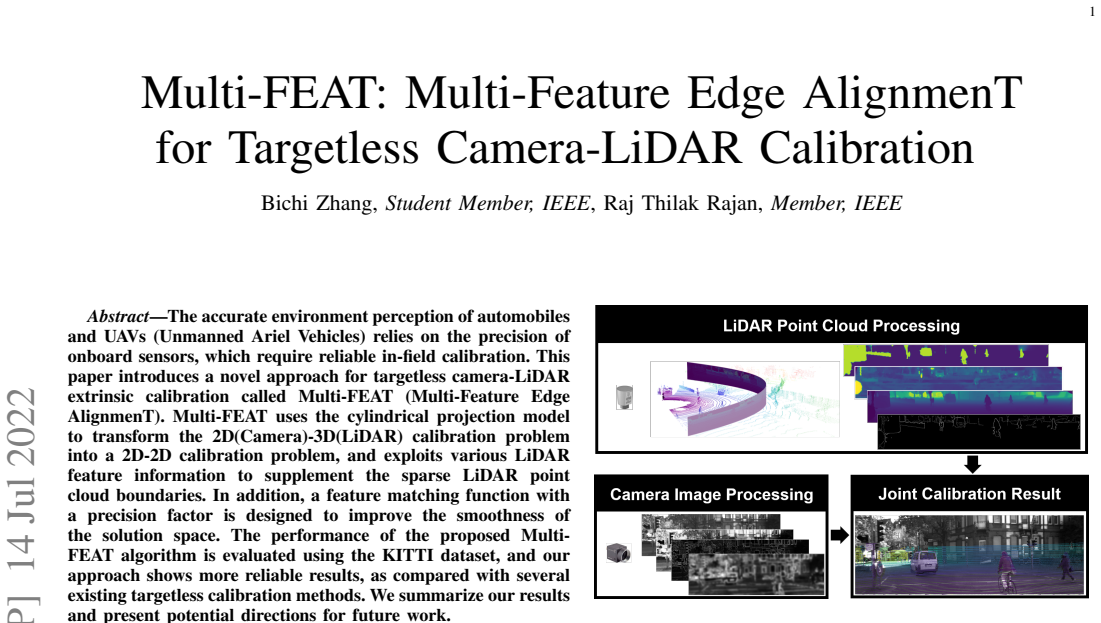
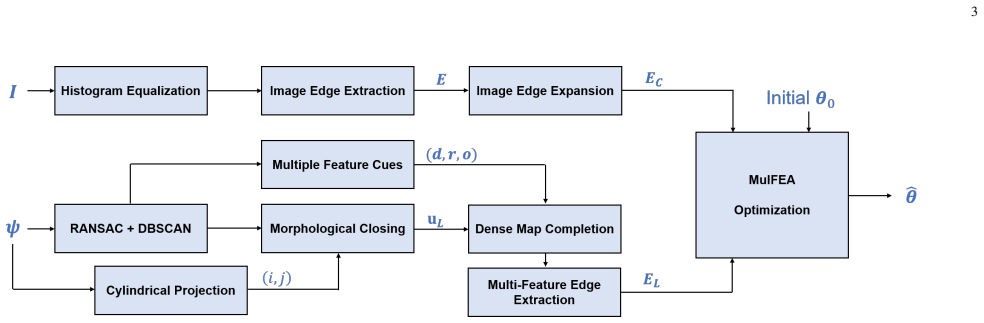
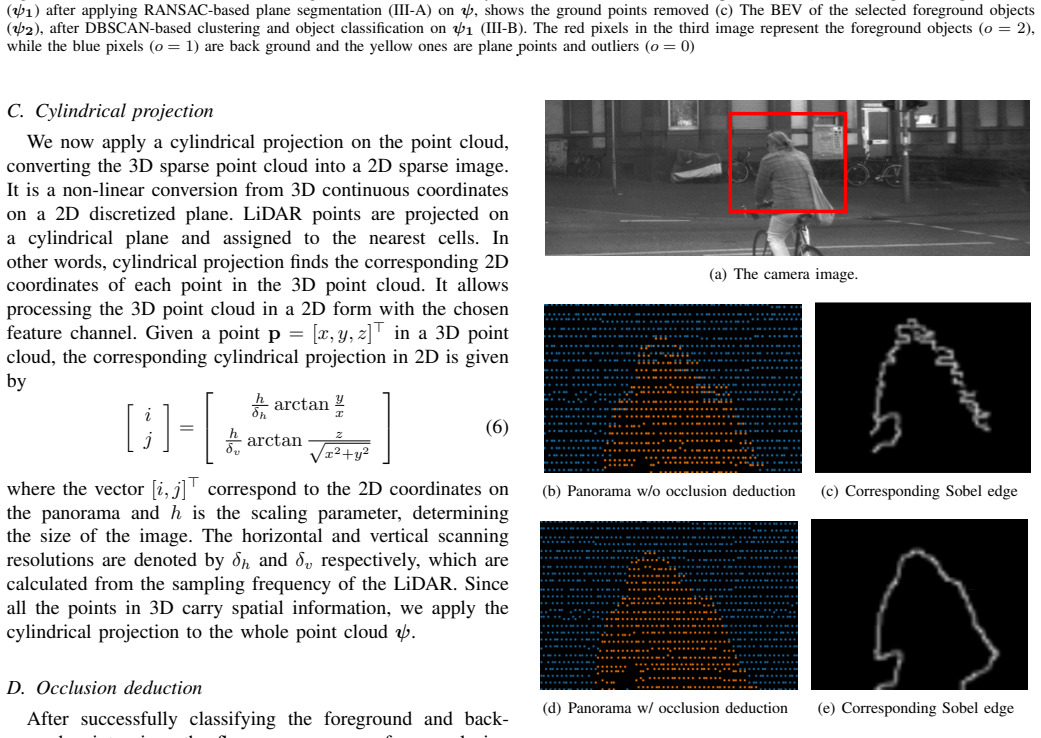
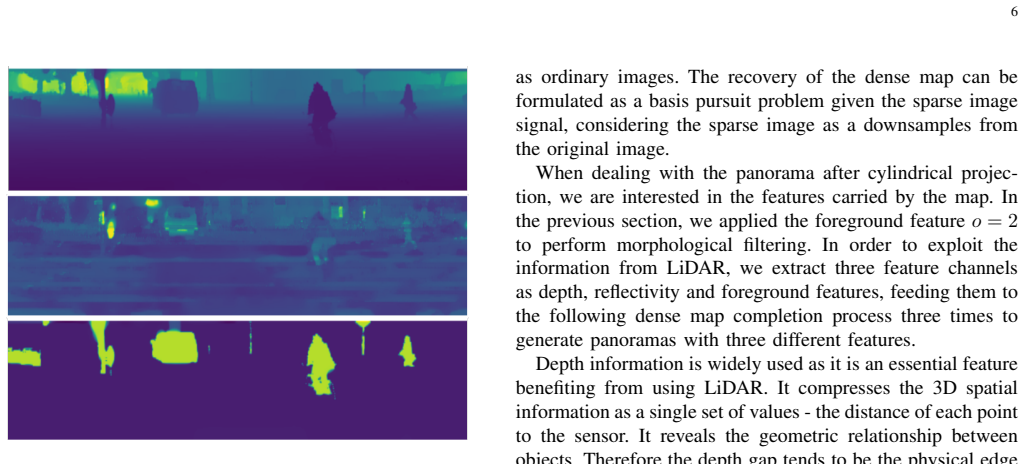
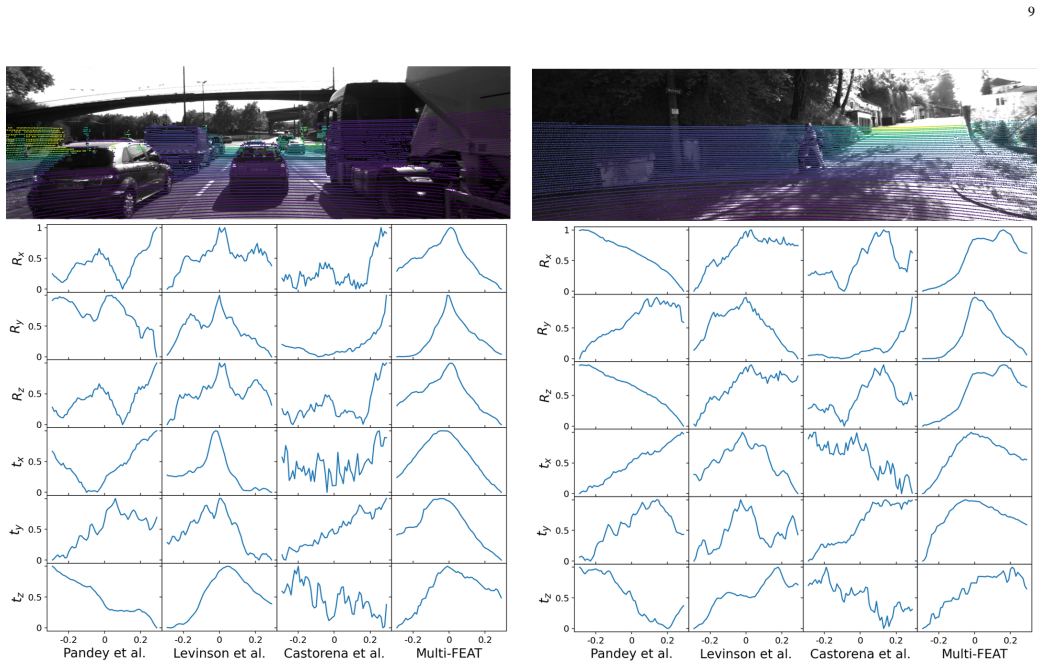
Multi-FEAT encodes the 3D LiDAR point cloud into a 2D panorama via the cylindrical projection model and exploits diverse LiDAR feature information in the panoramic images to supplement the sparse LiDAR point cloud boundaries. Camera edges are extracted using off-the-shelf segmentation solutions, after which a feature-matching function is used to optimize the calibration parameters, producing more reliable results than several existing targetless calibration methods.
What carries the argument
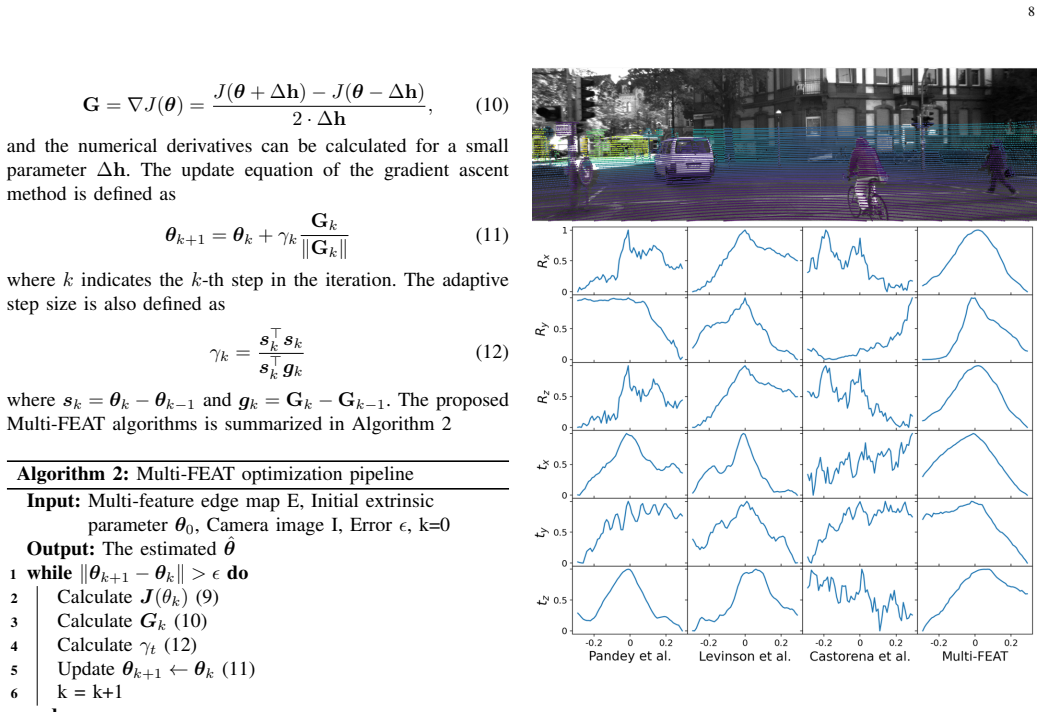
The feature-matching function that optimizes extrinsic parameters by aligning multi-feature edges between cylindrical LiDAR panoramas and camera images.
If this is right
- Targetless calibration becomes feasible for in-field use in automobiles and UAVs without special calibration objects.
- Sparse LiDAR boundaries can be made usable for alignment by supplementing them with panoramic feature information.
- The resulting extrinsic parameters support more accurate sensor fusion than those from several prior targetless methods.
- The approach supplies a concrete starting point for further development of feature-based calibration routines.
Where Pith is reading between the lines
- The same cylindrical-projection step could be tested with other feature types or with radar data to check whether the edge-alignment benefit generalizes.
- Performance may vary with the choice of segmentation tool for camera edges, suggesting an ablation on that component would be informative.
- If the matching function converges quickly, the method could support periodic re-calibration during vehicle operation rather than only at setup time.
Load-bearing premise
Diverse LiDAR feature information extracted from cylindrical panoramic images can sufficiently supplement the sparse point cloud boundaries to support reliable edge alignment and parameter optimization.
What would settle it
A side-by-side evaluation on new sensor data in which the parameters returned by the Multi-FEAT matching function produce higher calibration error than one or more of the compared targetless baselines.
Figures
read the original abstract
Multi-agent systems, e.g., automobiles and UAVs (Unmanned Ariel Vehicles), rely on the precision of onboard sensors to accurately perceive their environment, which in turn depends on the precision of onboard sensors and reliable in-field calibration. This paper introduces a novel targetless camera-LiDAR extrinsic calibration approach called Multi-FEAT (Multi-Feature Edge AlignmenT). Multi-FEAT uses the cylindrical projection model to encode the 3D LiDAR point cloud into a 2D panorama and exploits diverse LiDAR feature information in panoramic images to supplement the sparse LiDAR point cloud boundaries. Furthermore, camera edges are extracted using off-the-shelf segmentation solutions. In addition, a feature-matching function is designed to optimize the calibration parameters. The performance of the proposed Multi-FEAT algorithm is evaluated using the KITTI dataset, and our approach shows more reliable results than several existing targetless calibration methods. We conclude our analysis with directions for future work.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Multi-FEAT, a targetless camera-LiDAR extrinsic calibration method. It encodes the 3D LiDAR point cloud via cylindrical projection into a 2D panorama, extracts diverse LiDAR features to supplement sparse boundaries, detects camera edges with off-the-shelf segmentation, and optimizes extrinsic parameters with a designed feature-matching function. The approach is evaluated on the KITTI dataset and claimed to yield more reliable results than existing targetless methods.
Significance. If the empirical claims are substantiated with quantitative metrics, the work could provide a practical advance in targetless calibration for multi-agent systems by addressing LiDAR sparsity through multi-feature augmentation in panoramic projections. The pipeline is internally coherent with no evident circularity or unsupported logical steps.
major comments (1)
- Abstract: the central claim that the method 'shows more reliable results than several existing targetless calibration methods' on KITTI supplies no quantitative metrics, error statistics, baseline comparisons, or optimization details, rendering the performance assertion unverifiable from the text and load-bearing for the contribution.
minor comments (1)
- Abstract: 'Unmanned Ariel Vehicles' is a typographical error and should read 'Unmanned Aerial Vehicles'.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive comment. We address the single major comment point-by-point below.
read point-by-point responses
-
Referee: Abstract: the central claim that the method 'shows more reliable results than several existing targetless calibration methods' on KITTI supplies no quantitative metrics, error statistics, baseline comparisons, or optimization details, rendering the performance assertion unverifiable from the text and load-bearing for the contribution.
Authors: We agree that the abstract, as currently written, states the performance claim without accompanying quantitative support, which limits immediate verifiability. The body of the manuscript contains the full experimental results on KITTI (including error statistics, baseline comparisons, and optimization details), but the abstract does not summarize them. We will revise the abstract to incorporate concise quantitative metrics (e.g., mean rotation/translation errors and comparisons) that substantiate the claim while remaining within length constraints. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper describes a calibration pipeline (cylindrical LiDAR projection to panorama, multi-feature extraction to augment boundaries, off-the-shelf camera edge detection, and a designed matching function for extrinsic optimization) followed by empirical evaluation on KITTI. No equations, derivations, fitted parameters presented as predictions, or self-citation chains appear in the abstract or described method. The central performance claim is a comparative empirical assertion against existing methods, not a reduction to inputs by construction. The derivation chain is therefore self-contained and non-circular.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Extrinsic calibration of a camera and laser range finder (improves camera calibration),
Q. Zhang and R. Pless, “Extrinsic calibration of a camera and laser range finder (improves camera calibration),” in 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), vol. 3, 2004, pp. 2301–2306 vol.3
work page 2004
-
[2]
Automatic calibration of a range sensor and camera system,
H. Alismail, D. Baker, and B. Browning, “Automatic calibration of a range sensor and camera system,” 10 2012
work page 2012
-
[3]
Self calibration of multiple lidars and cameras on autonomous vehicles,
M. Pereira, D. Silva, V . Santos, and P. Dias, “Self calibration of multiple lidars and cameras on autonomous vehicles,” Robotics and Autonomous Systems, vol. 83, 05 2016
work page 2016
-
[4]
Automatic camera and range sensor calibration using a single shot,
A. Geiger, F. Moosmann, O. Car, and B. Schuster, “Automatic camera and range sensor calibration using a single shot,” in 2012 IEEE Interna- tional Conference on Robotics and Automation , 2012, pp. 3936–3943. 11
work page 2012
-
[5]
A novel method for the extrinsic calibration of a 2d laser rangefinder and a camera,
W. Dong and V . Isler, “A novel method for the extrinsic calibration of a 2d laser rangefinder and a camera,” IEEE Sensors Journal , vol. 18, no. 10, p. 4200–4211, May 2018. [Online]. Available: http://dx.doi.org/10.1109/JSEN.2018.2819082
-
[6]
O. Montoya, O. Icasio, and J. Salas, COUPLED: Calibration of a LiDAR and Camera Rig Using Automatic Plane Detection , 06 2020, pp. 209– 218
work page 2020
-
[7]
Are we ready for autonomous driving? the KITTI vision benchmark suite,
A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for autonomous driving? the KITTI vision benchmark suite,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2012
work page 2012
-
[8]
Fast extrinsic calibration of a laser rangefinder to a camera,
R. Unnikrishnan and M. Hebert, “Fast extrinsic calibration of a laser rangefinder to a camera,” 01 2005
work page 2005
-
[9]
Automatic camera and range sensor calibration using a single shot,
A. Geiger, F. Moosmann, O. Car, and B. Schuster, “Automatic camera and range sensor calibration using a single shot,” in 2012 IEEE Interna- tional Conference on Robotics and Automation , 2012, pp. 3936–3943
work page 2012
-
[10]
Extrinsic calibration between a multi-layer lidar and a camera,
S. A. Rodriguez F., V . Fremont, and P. Bonnifait, “Extrinsic calibration between a multi-layer lidar and a camera,” in 2008 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Sys- tems, 2008, pp. 214–219
work page 2008
-
[11]
3d lidar-camera extrinsic calibration using an arbitrary trihedron,
X. Gong, Y . Lin, and J. Liu, “3d lidar-camera extrinsic calibration using an arbitrary trihedron,” Sensors (Basel, Switzerland), vol. 13, pp. 1902– 18, 02 2013
work page 1902
-
[12]
Indirect correspondence-based robust extrinsic calibration of lidar and camera,
S. Sim, J. Sock, and K. Kwak, “Indirect correspondence-based robust extrinsic calibration of lidar and camera,” Sensors, vol. 16, p. 933, 06 2016
work page 2016
-
[13]
Accurate calibration of lidar-camera systems using ordinary boxes,
Z. Pusztai and L. Hajder, “Accurate calibration of lidar-camera systems using ordinary boxes,” in 2017 IEEE International Conference on Computer Vision Workshops (ICCVW) , 2017, pp. 394–402
work page 2017
-
[14]
Sensor and sensor fusion technology in autonomous vehicles: A review,
D. J. Yeong, G. Velasco-Hernandez, J. Barry, and J. Walsh, “Sensor and sensor fusion technology in autonomous vehicles: A review,” Sensors, vol. 21, no. 6, 2021. [Online]. Available: https://www.mdpi.com/1424-8220/21/6/2140
work page 2021
-
[15]
Autonomy for mars rovers: Past, present, and future,
M. Bajracharya, M. W. Maimone, and D. Helmick, “Autonomy for mars rovers: Past, present, and future,” Computer, vol. 41, no. 12, pp. 44–50, 2008
work page 2008
-
[16]
Online camera-lidar calibration with sensor semantic information,
Y . Zhu, C. Li, and Y . Zhang, “Online camera-lidar calibration with sensor semantic information,” in 2020 IEEE International Conference on Robotics and Automation (ICRA) , 2020, pp. 4970–4976
work page 2020
-
[17]
Crlf: Automatic calibration and refinement based on line feature for lidar and camera in road scenes,
T. Ma, Z. Liu, G. Yan, and Y . Li, “Crlf: Automatic calibration and refinement based on line feature for lidar and camera in road scenes,” 2021
work page 2021
-
[18]
Regnet: Multimodal sensor registration using deep neural networks,
N. Schneider, F. Piewak, C. Stiller, and U. Franke, “Regnet: Multimodal sensor registration using deep neural networks,” 07 2017
work page 2017
-
[19]
Calibnet: Geo- metrically supervised extrinsic calibration using 3d spatial transformer networks,
G. Iyer, R. Ram, K. Jatavallabhula, and M. Krishna, “Calibnet: Geo- metrically supervised extrinsic calibration using 3d spatial transformer networks,” 10 2018, pp. 1110–1117
work page 2018
-
[20]
G. Pandey, J. R. McBride, S. Savarese, and R. M. Eustice, “Automatic targetless extrinsic calibration of a 3D Lidar and camera by maximizing mutual information,” in AAAI, 2012. [Online]. Available: http://www.aaai.org/ocs/index.php/AAAI/AAAI12/paper/view/5029
work page 2012
-
[21]
Automatic online calibration of cameras and lasers
J. Levinson and S. Thrun, “Automatic online calibration of cameras and lasers.” in Robotics: Science and Systems , vol. 2, 2013, p. 7
work page 2013
-
[22]
Target-less camera-lidar extrinsic calibration using a bagged dependence estimator,
K. Irie, M. Sugiyama, and M. Tomono, “Target-less camera-lidar extrinsic calibration using a bagged dependence estimator,” in 2016 IEEE International Conference on Automation Science and Engineering (CASE), 2016, pp. 1340–1347
work page 2016
-
[23]
Automatic calibration of multi- modal sensor systems using a gradient orientation measure,
Z. Taylor, J. Nieto, and D. Johnson, “Automatic calibration of multi- modal sensor systems using a gradient orientation measure,” in 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems , 2013, pp. 1293–1300
work page 2013
-
[24]
Autocalibration of li- dar and optical cameras via edge alignment,
J. Castorena, U. S. Kamilov, and P. T. Boufounos, “Autocalibration of li- dar and optical cameras via edge alignment,” in 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2016, pp. 2862–2866
work page 2016
-
[25]
Image analysis and mathematical morphol-ogy,
J. Serra, “Image analysis and mathematical morphol-ogy,” 1982
work page 1982
-
[26]
High-resolution lidar-based depth mapping using bilateral filter,
C. Premebida, L. Garrote, A. Asvadi, A. P. Ribeiro, and U. Nunes, “High-resolution lidar-based depth mapping using bilateral filter,” in 2016 IEEE 19th international conference on intelligent transportation systems (ITSC). IEEE, 2016, pp. 2469–2474
work page 2016
-
[27]
Communications of the ACM 24, 381–395
M. A. Fischler and R. C. Bolles, “Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography,” Commun. ACM , vol. 24, no. 6, p. 381–395, Jun. 1981. [Online]. Available: https://doi.org/10.1145/358669.358692
-
[28]
R. Nobrega, J. Quintanilha, and C. O’Hara, “A noise-removal approach for lidar intensity images using anisotropic diffusion filtering to preserve object shape characteristics,” American Society for Photogrammetry and Remote Sensing - ASPRS Annual Conference 2007: Identifying Geospatial Solutions, vol. 2, pp. 471–481, 01 2007
work page 2007
-
[29]
Computation at the edge of chaos: Phase transitions and emergent computation,
L. I. Rudin, S. Osher, and E. Fatemi, “Nonlinear total variation based noise removal algorithms,” Physica D: Nonlinear Phenomena , vol. 60, no. 1, pp. 259–268, 1992. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/016727899290242F
-
[30]
A. Beck and M. Teboulle, “Fast gradient-based algorithms for con- strained total variation image denoising and deblurring problems,” IEEE Transactions on Image Processing, vol. 18, no. 11, pp. 2419–2434, 2009
work page 2009
-
[31]
The split bregman method for l1-regularized problems,
T. Goldstein and S. Osher, “The split bregman method for l1-regularized problems,” SIAM J. Imaging Sciences , vol. 2, pp. 323–343, 01 2009
work page 2009
-
[32]
Pyunlocbox: Optimization by proximal splitting,
E. L. Laboratory, “Pyunlocbox: Optimization by proximal splitting,” https://pyunlocbox.readthedocs.io/en/stable/index.html#
-
[33]
A computational approach to edge detection,
J. Canny, “A computational approach to edge detection,” IEEE Transac- tions on Pattern Analysis and Machine Intelligence , vol. PAMI-8, no. 6, pp. 679–698, 1986
work page 1986
-
[34]
Two-point step size gradient methods,
J. Barzilai and J. M. Borwein, “Two-point step size gradient methods,” IMA Journal of Numerical Analysis , vol. 8, no. 1, pp. 141–148, 01
-
[35]
IMA Journal of Numerical Analysis8(1), 141–148 (1988)
[Online]. Available: https://doi.org/10.1093/imanum/8.1.141
-
[36]
Vision meets robotics: The KITTI dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The KITTI dataset,” International Journal of Robotics Research (IJRR) , 2013
work page 2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.